Таблица Д3
Номер усло-вия
|
m1,
кг
|
m2,
кг
|
m3,
кг
|
m4,
кг
|
m5,
кг
|
M4,
Нм |
M5,
Нм
|
F = f(s)
|
s1,
м
| Найти |
0
|
2
|
0
|
4
|
6
|
0
|
0
|
0,8
|
50(2+3s)
|
1,0
|
|
1
|
6
|
0
|
2
|
0
|
8
|
0,6
|
0
|
20(5+2s)
|
1,2
|
|
2
|
0
|
4
|
6
|
8
|
0
|
0
|
0,4
|
80(3+4s)
|
0,8
|
|
3
|
0
|
2
|
4
|
0
|
10
|
0,3
|
0
|
40(4+5s)
|
0,6
|
|
4
|
8
|
0
|
2
|
6
|
0
|
0
|
0,6
|
30(3+2s)
|
1,4
|
|
5
|
8
|
0
|
4
|
0
|
6
|
0,9
|
0
|
40(3+5s)
|
1,6
|
|
6
|
0
|
6
|
2
|
8
|
0
|
0
|
0,8
|
60(2+5s)
|
1,0
|
|
7
|
0
|
4
|
6
|
0
|
10
|
0,6
|
0
|
30(8+3s)
|
0,8
|
|
8
|
6
|
0
|
4
|
0
|
8
|
0,3
|
0
|
40(2+5s)
|
1,6
|
|
9
|
0
|
4
|
6
|
10
|
0
|
0
|
0,4
|
50(3+2s)
|
1,4
|
|
|
(краткие сведения из теории)
Кинетическая энергия. Кинетической энергией точки называется величина  , где m – масса точки, , где m – масса точки,  – абсолютная скорость точки. Кинетическая энергия механической системы – абсолютная скорость точки. Кинетическая энергия механической системы
 , (1) , (1)
где  – масса точки системы, – масса точки системы,  – абсолютная скорость этой точки. – абсолютная скорость этой точки.
При поступательном движении твердого тела
 , ,
где M – масса тела, – скорость тела;
при вращении твердого тела вокруг неподвижной оси
 , ,
где  – момент инерции тела относительно оси вращения, – угловая скорость тела; – момент инерции тела относительно оси вращения, – угловая скорость тела;
при плоском движении тела
 , ,
где M – масса тела,  – скорость центра масс, – скорость центра масс,  – момент инерции тела относительно оси, проходящей через центр масс С, – угловая скорость тела. – момент инерции тела относительно оси, проходящей через центр масс С, – угловая скорость тела. |
|
Момент инерции тела относительно оси z – это величина
 , ,
где – масса точки тела,  – расстояние от этой точки до оси z. – расстояние от этой точки до оси z.
Момент инерции тела зависит от формы тела и положения оси z. Значения для однородных тел простой формы (кольцо, стержень, диск, прямоугольник, цилиндр и т. д.) приводятся в справочниках по механике; значения , необходимые для решения данной задачи, приведены ниже в указаниях к решению.
Если задан радиус инерции тела, то  , где M – масса тела. , где M – масса тела.
Элементарная работа силы dA на бесконечно малом перемещении ds точки, в которой приложена сила, равна
 , (2) , (2)
где  – сила, ds – модуль бесконечно малого перемещения точки, – скорость точки, в которой приложена сила (направление – сила, ds – модуль бесконечно малого перемещения точки, – скорость точки, в которой приложена сила (направление  совпадает с направлением ). Выражение (2) – одна из возможных форм записи совпадает с направлением ). Выражение (2) – одна из возможных форм записи  . Например, если учесть, что . Например, если учесть, что  , то из (2) следует еще одна форма записи: , то из (2) следует еще одна форма записи:
 , (3) , (3)
где dt – время бесконечно малого перемещения. Из (2) (или (3)) следует, что
 если если  ; ;
если  ; ;
 если если  ; ;
 если если  . .
Если сила приложена к точке вращающегося тела, то, применяя (2), получим
 , (4) , (4)
где  – момент силы относительно оси вращения тела, – момент силы относительно оси вращения тела,  – бесконечно малый угол поворота тела. Если на тело действует пара сил, то (4) дает элементарную работу пары сил, где – момент пары сил относительно оси z. – бесконечно малый угол поворота тела. Если на тело действует пара сил, то (4) дает элементарную работу пары сил, где – момент пары сил относительно оси z.
Работа силы на конечном перемещении точки из  в в 
 . (5) . (5)
Из (5) следуют выражения для работы силы в частных случаях.
Работа силы тяжести (постоянной):
 , ,
где P=mg – сила тяжести,  – перемещение центра масс тела по вертикали. Знак “–“ соответствует движению центра масс вверх. – перемещение центра масс тела по вертикали. Знак “–“ соответствует движению центра масс вверх.
|
Теорема об изменении кинетической энергии системы.
Формулировка (в интегральной (конечной) форме): изменение кинетической энергии системы на некотором конечном перемещении системы из одного положения в другое равно сумме работ всех внешних и внутренних сил, приложенных к точкам системы на соответствующих конечных перемещениях точек приложения этих сил.
Математическая запись:
 . .
Если система состоит из абсолютно твердых тел, соединенных нерастяжимыми нитями или стержнями (неизменяемая система), то  . .
|
|
Указания. Задача ДЗ - на применение теоремы об изменении кинетической энергии системы. При решении задачи учесть, что кинетическая энергия системы равна сумме кинетических энергий всех входящих в систему тел: эту энергию нужно выразить через ту скорость (линейную или угловую), которую в задаче надо определить. При вычислении кинетической энергии катка, совершающего плоское движение, для установления зависимости между его угловой скоростью и скоростью его центра масс воспользоваться понятием о мгновенном центре скоростей (кинематика). При определении работы все перемещения следует выразить через заданное перемещение s1, учтя, что зависимость между перемещениями здесь будет такой же, как между соответствующими скоростями.
Когда по данным таблицы m2 = 0, груз 2 на чертеже не изображать; шкивы 4 и 5 всегда входят в систему.
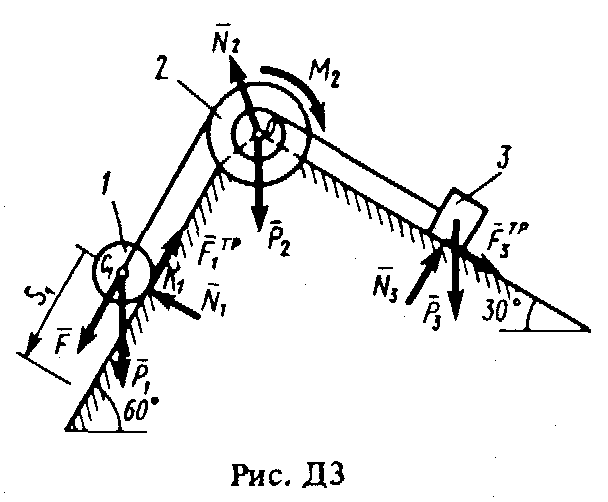
Пример ДЗ. Механическая система (рис. ДЗ) состоит из сплошного цилиндрического катка l, ступенчатого шкива 2 с радиусами ступеней R2 и r2 (масса шкива равномерно распределена по его внешнему ободу) и груза 3 (коэффициент трения груза о плоскость равен f ). Тела системы соединены друг с другом нитями, намотанными на шкив 2.
|
Под действием силы F = f (s), зависящей от перемещения s точки ее приложения, система приходит в движения из состояния покоя. При движении на шкив 2 действует постоянный момент М2 сил сопротивления.
Дано: m1 = 4 кг, m2 = 10кг,
m3 = 8 кг, R2 = 0,2 м, r2 = 0,1 м, f = 0,2. М2 = 0,6 Н м, F = 2(1+2s) Н, s1 = 2м.
Определить: скорость 
центра масс катка, когда s = s1.
|
Решение. 1. Рассмотрим движение неизменяемой механической системы, состоящей из тел 1 2, 3, соединенных нитями. Изобразим все действующие на систему внешние силы: активные  , момент сопротивления М2 реакции , момент сопротивления М2 реакции  и силы трения и силы трения  и и  . .
Для определения  воспользуемся теоремой об изменении кинетической энергии системы воспользуемся теоремой об изменении кинетической энергии системы
 (1) (1)
2. Определяем Т0 и Т. Так как в начальный момент система находилась в покое, то Т0 = 0. Величина Т равна сумме энергий всех тел системы:
 (2) (2)
Учитывая, что тело 1 совершает плоское движение, тело 3 движется поступательно, а тело 2 вращается вокруг неподвижной оси, получим
 (3) (3)
Все входящие сюда скорости следует выразить через искомую . Приняв во внимание, что точка K1 - мгновенный центр скоростей катка 1, и обозначив радиус катка через r1, получим
 (4) (4)
Кроме того, входящие в (3) моменты инерции имеют значения
 (5) (5)
Подставив все величины (4) и (5) в равенство (3), а затем используя равенство (2) получим окончательно:
 (6) (6)
3. Теперь найдем сумму работ всех действующих внешних сил при том перемещении, которое будет иметь система, когда точка С1 пройдет путь s1. Одновременно все перемещения следует выразить через заданную величину s1, для чего учтем, что здесь зависимость между перемещениями будет такой же, как и между соответствующими скоростями в равенствах (4), т.е.  . В результате получим: . В результате получим:



Работа остальных сил равна нулю, так как точка K1, где приложены силы  и , является мгновенным центром скоростей, точка O, где приложены и , является мгновенным центром скоростей, точка O, где приложены  , и , и  , неподвижна, а реакция , неподвижна, а реакция  перпендикулярна перемещению груза 3. Тогда окончательно перпендикулярна перемещению груза 3. Тогда окончательно
 (7) (7)
4. Подставив выражения (6) и (7) в уравнение (1) и учитывая, что T0 = 0, получим
  (8) (8)
При числовых значениях заданных величин равенство (8) дает
Отсюда находим искомую скорость.
Ответ: = 1.53м/с.
Задача Д4
(тема: “Принцип возможных перемещений”)
Механизм, расположенный в горизонтальной плоскости, находится под действием приложенных сил в равновесии; положение равновесия определяется углами  , ,  , ,  , ,  , ,  (рис. Д4.0-Д4.9, табл. Д4а и Д4б). Длины стержней механизма (кривошипов) равны: l1 = 0,4 м, l4 = 0,6 м (размеры l2 и l3 произвольны); точка E находится в середине соответствующего стержня. (рис. Д4.0-Д4.9, табл. Д4а и Д4б). Длины стержней механизма (кривошипов) равны: l1 = 0,4 м, l4 = 0,6 м (размеры l2 и l3 произвольны); точка E находится в середине соответствующего стержня.
На ползун В механизма действует сила упругости пружины  ;численно ;численно  , где с – коэффициент жесткости пружины, , где с – коэффициент жесткости пружины,  – ее деформация. Кроме того, на рис. Д4.0 и Д4.1 на ползун Dдействует сила – ее деформация. Кроме того, на рис. Д4.0 и Д4.1 на ползун Dдействует сила  , а на кривошип О1А – пара сил с моментом М;на рис. Д4.2- Д4.9 на кривошипы O1Aи О2D действуют пары сил с моментами M1 и М2. , а на кривошип О1А – пара сил с моментом М;на рис. Д4.2- Д4.9 на кривошипы O1Aи О2D действуют пары сил с моментами M1 и М2.
Определить, чему равна при равновесии деформация пружины, и указать, растянута пружина или сжата.
Значения всех заданных величин для рис. Д4.0-Д4.4 приведены в табл. Д4а, а для рис. Д4.5-Д4.9 в табл. Д4б. В этих таблицах сила Qдана в ньютонах, а моменты М,M1, M2 – в ньютон-метрах.
Построение чертежа начинать со стержня, направление которого определяется углом ; для большей наглядности ползун с направляющими и пружину изобразить так, как в примере Д4 (см. рис. Д4, а также рис. Д4.10б). Если на чертеже решаемого варианта задачи прикрепленный к ползуну В стержень окажется совмещенным с пружиной (как на рис. Д4.10а), то пружину следует считать прикрепленной к ползуну с другой стороны (как на рис. Д4.10б, где одновременно иначе изображены направляющие).
Перед выполнением задания прочтите по учебнику тему: «Принцип возможных перемещений».
Ответьте на вопросы:
Как определяется число степеней свободы системы?
Что такое обобщенные координаты?
Что называется возможными перемещениями системы?
Формулы для вычисления элементарной работы силы на возможном перемещении (сравните с формулами, которые применили в задаче Д4).
Какие связи называются идеальными?
Сформулируйте принцип возможных перемещений для системы и запишите соответствующее уравнение.
Запишите уравнение мощностей, эквивалентное принципу возможных перемещений.
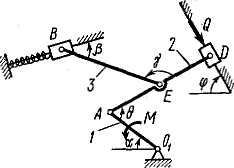
Рис. Д4.0
|
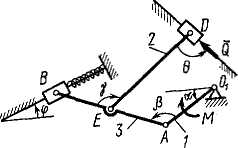
Рис. Д4.1
|
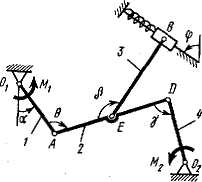
Рис. Д4.2
|
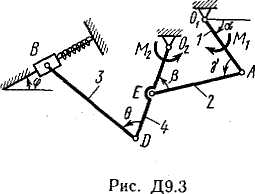
Рис. Д4.3
|
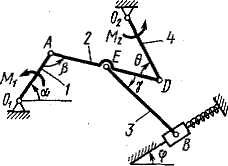
Рис. Д4.4
|
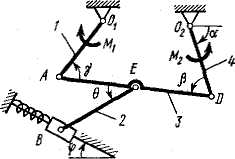
Рис. Д4.5
|
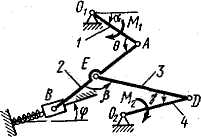
Рис. Д4.6
|
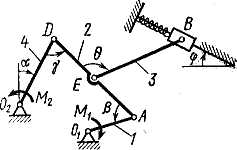
Рис. Д4.7
|
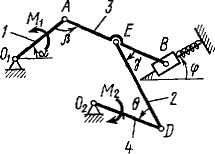
Рис. Д4.8
|
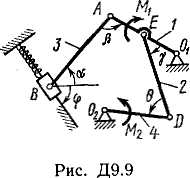
Рис. Д4.9
| |
 Скачать 1.07 Mb.
Скачать 1.07 Mb.