МЕТОДИЧЕСКОЕ ПОСОБИЕ ежегодные занятия с водителями. Методическое пособие по проведению ежегодных занятий с водителями
 Скачать 2.35 Mb. Скачать 2.35 Mb.
|

|
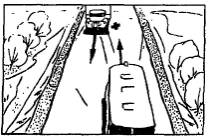
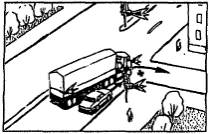
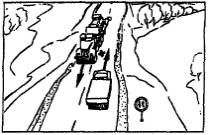
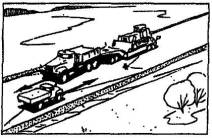
Тема 1.2. Конструктивные особенности транспортных средств, обеспечивающие безопасность дорожного движения Безопасность автотранспортных средств (АТС) определяется их конструктивными свойствами, реализованными при проектировании и изготовлении промышленностью, а также эксплуатационными свойствами, связанными с уровнем технической эксплуатации АТС. Конструктивные и эксплуатационные свойства АТС, определяющие безопасность, подразделяют на несколько групп по различным аспектам обеспечения безопасности движения: активная, пассивная, послеаварийная и экологическая. Активная безопасность - конструктивные и эксплуатационные свойства АТС, способствующие предотвращению ДТП при возникновении опасных дорожно-транспортных ситуаций, а также предотвращению возникновения таких ситуаций. Пассивная безопасность - конструктивные и эксплуатационные свойства АТС, влияющие на предупреждение, либо уменьшение тяжести травмирования участников дорожного движения, а также снижение тяжести всех видов механических повреждений при возникновении ДТП. ПБ подразделяют на внутреннюю и внешнюю. Внутренняя ПБ направлена на предупреждение или снижение травматизма пассажиров, водителя и обеспечение сохранности грузов. Внешняя ПБ уменьшает травматизм других участников движения - пешеходов, водителей и пассажиров, других транспортных средств, вовлеченных в ДТП, а также сокращает механические повреждения других транспортных средств. Послеаварийная безопасность - конструктивные и эксплуатационные свойства АТС, уменьшающие тяжесть последствий после остановки АТС в результате ДТП. Это свойства, позволяющие быстро эвакуировать пассажиров, погасить пожар, ликвидировать последствия ДТП и предотвратить возникновение новых аварийных ситуаций. Замки дверей должны выдерживать большие перегрузки, не открываясь, чтобы предотвратить выпадение пассажира при ДТП (пассивная безопасность). Вместе с тем, они не должны заклиниваться и препятствовать эвакуации пострадавших из автомобиля (послеаварийная безопасность). Экологическая безопасность - конструктивные и эксплуатационные свойства АТС, определяющие уровень вредного воздействия на участников движения и окружающую среду в процессе эксплуатации автомобиля. Экологическая безопасность, проявляющаяся во время повседневной работы автомобиля, коренным образом отличается от перечисленных выше трех видов безопасности, которые проявляются лишь при ДТП. Взаимосвязь различных видов безопасности и противоречивость требований, предъявляемых к конструкции автомобиля, вынуждают конструкторов и технологов принимать компромиссные решения. При этом неизбежно ухудшаются одни свойства, менее существенные для автомобиля данного типа, и улучшаются другие, имеющие большее значение. Далее рассмотрим основные свойства автомобиля, влияющие на безопасность движения. Компоновочные параметры автомобиля. К важнейшим компоновочным параметрам АТС, оказывающим влияние на активную безопасность, относят: габаритные и весовые параметры. Габаритная длина и ширина АТС оказывают влияние на параметры транспортного потока, а, следовательно, на возникновение различных опасных дорожно-транспортных ситуаций (ДТС). Габаритная длина крупнотоннажных грузовых автомобилей с прицепами в сочетании с более низкой по сравнению с легковыми автомобилями тяговой динамикой приводит к опасным ситуациям при обгонах. Кроме того, необходимо рассматривать длину АТС в связи с его тормозной динамикой, т.к. сочетание этих параметров определяет, так называемый, динамический габарит (по длине). Габаритная ширина АТС оказывает наряду со скоростью определяющее влияние на ширину габаритного коридора, которым называют ширину, занимаемую АТС в движении. Во время прямолинейного движения автомобиль все время совершает небольшие «рыскания» относительно основной траектории. Водитель все время подруливает, выполняя задачу стабилизации траектории. В результате автомобиль движется по вытянутой синусоидальной кривой (с небольшими переменными амплитудами и относительно большими, также переменными, периодами). Соответственно, ширина динамического коридора превышает ширину автомобиля. На рис. 16 приведена зависимость приращения динамического коридора от скорости движения автомобиля. 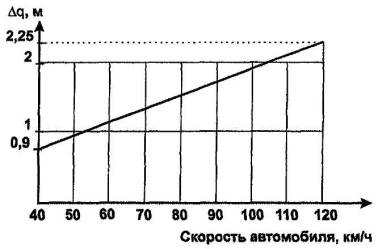 Рис. 16. Приращение динамического коридора в зависимости от скорости движения автомобиля. Динамический габаритный коридор Bq определяется по формуле: Bq = Ba + q где: Вa - габаритная ширина автомобиля; q- приращение динамического коридора. Чем больше длина автомобиля, чем больше число прицепов, тем более увеличивается динамический габарит. Еще более динамический габарит увеличивается при прохождении поворотов и составляет 1,5 - 2 ширины автомобиля. Задние колеса при повороте движутся по меньшему радиусу, чем передние (рис. 17). На рис. 18 (А, Б, В, Г, Д, В) приведены примеры ДТП, связанные, в основном, с габаритными параметрами АТС. 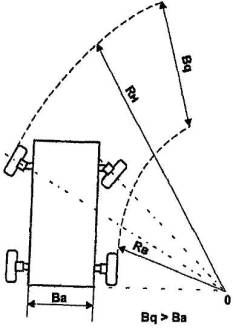 Рис. 17. Увеличение динамического габарита Bqпри повороте.
Рис. 18. Примеры ДТП, обусловленных в основном габаритными параметрами транспортных средств. Высокие автомобили при движении имеют значительные поперечные колебания, что также может сократить зазор безопасности, например, при встречном разъезде, и привести к касательному столкновению либо задеванию столбов опор и т.д. (рис. 19) (А, Б).
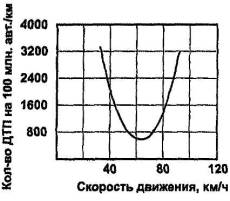
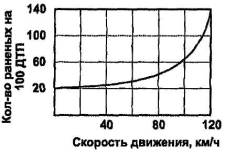
Рис. 19. Тяговая динамичность автомобиля. Вероятность совершения ДТП и тяжесть его последствия существенно зависит от скорости автомобиля. На рис. 20 (А, Б) приведены характеристики влияния скорости автомобиля на вероятность возникновения и тяжесть последствий ДТП.
Рис. 20. Влияние скорости движения на возникновение и тяжесть последствий ДТП. Как видно из представленных зависимостей, тяжесть последствий ДТП возрастает с увеличением скорости. Вместе с тем, большой процент ДТП совершается не только на повышенных, но и на пониженных скоростях. Тяговая динамичность автомобиля оценивается следующими основными показателями: максимальная скорость; максимальное ускорение; максимальное время разгона до 100 км/ч. Тяговая динамичность автомобиля определяется мощностью двигателя, передаточным числом и коэффициентом полезного действия (КПД) трансмиссии, размерами и сцепными качествами шин. В общем случае на автомобиль при разгоне действуют следующие силы: Р - сила тяги на ведущих колесах автомобиля (пропорциональна мощности двигателя, зависит от передаточного числа и коэффициента полезного действия трансмиссии, обратно пропорциональна радиусу шин); Ри - приведенная сила инерции автомобиля (^пропорциональна массе автомобиля с учетом вращающихся масс и ускорения); Рк - сила сопротивления качению (зависит от сцепных качеств шин и состояния дороги, с увеличением скорости возрастает пропорционально квадрату скорости); Рn - сила сопротивления подъему (зависит от веса автомобиля и угла продольного уклона); Рв - сила сопротивления воздуха (зависит от лобовой площадки автомобиля, его формы, обтекаемости и качества поверхности). Названные силы при движении автомобиля связывает соотношение баланса сил: Р = Ри + Рк + Рn + Рв То,как водитель использует скоростные качества автомобиля в конкретных дорожных условиях, определяет уровень безопасности. Вместе с тем, тяговая динамика накладывает существенные ограничения на тактику и технику управления автомобилем в зависимости от скоростных качеств автомобиля предполагает определенный стиль управления автомобилем, обеспечивающий безопасность. Перечислим основные ситуационные механизмы влияния тяговой динамичности автомобиля на безопасность движения. 1 - превышение скорости, безопасной для данных дорожных условий. Высокие скоростные свойства автомобиля позволяют недисциплинированным водителям превышать безопасную скорость; 2 - «тихоход» (автомобиль с низкими характеристиками тяговой динамичности) в транспортном потоке увеличивает число обгонов и тем самым число конфликтных ситуаций и ДТП; 3 - неоднородность характеристик тяговой динамичности автомобилей в транспортном потоке приводит к обгонам, объездам, перестроениям и увеличению числа конфликтных ситуаций и ДТП; Тормозная динамичность автомобиля Тормозная динамичность автомобиля определяется целым комплексом конструктивных параметров тормозных систем. Главными показателями эффективности рабочей тормозной системы являются величины тормозного пути (Sт) и времени срабатывания (tср). На рис. 21. приведена зависимость замедлений и тормозной силы от времени, так называемая, - тормозная диаграмма. 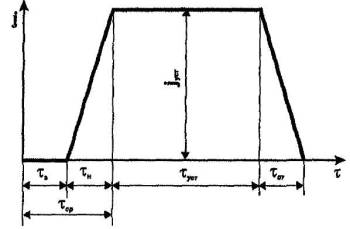 Рис. 21. Тормозная диаграмма. tз - время запаздывания срабатывания тормозной системы; tн - время нарастания замедления; tср - время срабатывания; tуст - время установившегося торможения (с установившимся замедлением); tот - время отпускания тормозной системы. Тормозной путь автомобиля определяется как расстояние, пройденное им от начала до конца торможения, и состоит из участков пути, проходимых за время срабатывания и за период установившегося торможения. При этом расстоянием, проходимым автомобилем за время отпускания тормозной системы обычно пренебрегают ввиду незначительности величины. В соответствии с ГОСТ Р 51709-2001 «Автотранспортные средства. Требования безопасности к техническому состоянию и методы проверки» в Правилах дорожного движения установлены предельные значения тормозного пути, при несоблюдении которых эксплуатация транспортных средств запрещается. Испытания рабочей тормозной системы проводят на специальных стендах или, при их отсутствии, на горизонтальном участке дороги с ровным, сухим, чистым, цементо- или асфальтобетонным покрытием при начальной скорости 40 км/ч для автомобилей и автобусов и 30 км/ч - для мотоциклов, мопедов (при одновременном воздействии на ручной и ножной приводы тормозов). Результаты испытаний являются недействительными, если для сохранения прямолинейного направления в процессе торможения водитель должен исправлять траекторию движения. Более 50 % всех ДТП из-за технической неисправности автомобилей происходит вследствие неудовлетворительного состояния тормозных систем. В таблице 4 приведены показатели эффективности действия тормозных систем автомобилей в соответствии с ГОСТ Р 51709-2001. Таблица 2 Нормативы эффективности торможения АТС рабочей тормозной системой при проверках в дорожных условиях
Таблица 3 Нормативы эффективности торможения АТС рабочей тормозной системой при проверках в дорожных условиях
Категории автотранспортных средств представлены в таблице 4. Таблица 4 Классификация автотранспортных средств, принятая в Правилах ЕЭК ООН
_____________ 1 Не регламентируется. Остановочный путь автомобиля увеличивается (по сравнению с тормозным) на величину, проходимую автомобилем за время реакции водителя. Устойчивость автомобиля Устойчивостью автомобиля называют свойство сохранять в движении требуемую траекторию. Различают продольную и поперечную устойчивость. Характеристики устойчивости определяются конструктивными параметрами автомобиля и зависят от его технического состояния. Потеря устойчивости чаще всего возникает не из-за предельных условий эксплуатации автомобиля, а из-за неправильных действий водителя: резких разгонов, торможений, неправильного маневрирования рулевым колесом. Частой предпосылкой потери устойчивости является скорость автомобиля, не соответствующая дорожным условиям. Если автомобиль движется с излишне высокой скоростью, то тяговая сила Рт приближается по величине к силе сцепления ведущих колес с дорогой Рсц, вследствие чего возможно их пробуксовывание. Скорость, при которой возникает пробуксовывание, уменьшается на участках дороги со скользким, неровным покрытием (укатанный снег, обледенелый асфальтобетон, булыжник). Резкое нажатие на дроссельную заслонку, например, перед подъемом или при обгоне в условиях скользкой, неровной дороги также может вызвать пробуксовывание, приводящее к боковому скольжению ведущих колес. Чем выше скорость движения, тем больше «рыскание» автомобиля на неровной дороге, тем больше вероятность потери курсовой устойчивости при наезде колеса на впадину или выступ. Водитель для сохранения курсовой устойчивости автомобиля должен избегать резких разгонов и торможений, резких маневров «подруливаний», должен управлять автомобилем плавно, тщательно выбирая скоростной режим и траекторию движения. Продольная, и, в особенности, поперечная устойчивость автомобиля зависят не только от его конструкции и скоростного режима, но и от размещения и веса перевозимого груза. Непосредственно перед перевозкой водитель должен продумать тактику своих действий на маршруте в связи с особенностями перевозимого груза. При всяком новом виде перевозок сложившийся ранее у водителя навык может оказаться не адекватным, не соответствующим новым условиям. Устойчивость автомобиля против опрокидывания уменьшается при поднятии центра масс. Чем шире колея, тем выше устойчивость автомобиля. Показатель поперечной устойчивости hоп определяется: где В - колея автомобиля (м); Чем ниже коэффициент hоп, тем меньше скорость движения на повороте или меньший угол поперечного уклона дороги могут вызвать опрокидывание. Следует помнить, что вероятность опрокидывания существенно зависит от технического состояния подвески. Особенно это относится к грузовым автомобилям и автобусам. Результаты проводимых на протяжении ряда лет обследований подвижного состава, позволяют сделать вывод о том, что при эксплуатации транспортных средств наблюдаются случаи неправомерного вмешательства персонала, в том числе водителей, в конструкцию АТС для «улучшения» их характеристик. Так, например, при переходе на эксплуатацию в осенне-зимний период умышленно отключаются приводы тормозных систем передних осей. По мнению большинства водителей, этот прием «улучшает» показатели устойчивости автомобилей при торможении на скользком дорожном покрытии, что является ошибочным. Поэтому, при проведении занятий, необходимо четко объяснить водителям, что торможение при выключенной передней оси увеличивает вероятность заноса. Особое внимание необходимо уделить проблеме устойчивости автопоезда при торможении в условиях низкого коэффициента сцепления. Большую помощь водителям на скользкой дороге окажет умение использовать приемы прерывистого и ступенчатого торможения. Отработка навыков выполнения этих приемов в условиях учебной площадки позволяет добиться автоматизма в их выполнении и существенно сократить тормозной путь и повысить устойчивость АТС не оборудованных антиблокировочными системами. Устойчивость цистерн зависит, прежде всего, от формы цистерн, степени заполнения, силы удара при всплеске жидкости в цистерне, интенсивности работы рулем. При 100 %заполнении существует лишь небольшая разница в пределе опрокидывания различных форм цистерн. Эллипсоидная форма цистерны с тремя перегородками против ударов от всплесков жидкости наиболее устойчива против опрокидывания даже при изменении частоты работы рулем. Это положение действительно также при 50 % и 75 % заполнении цистерны. Управляемость автомобиля Управляемость автомобиля определяется его свойством реагировать на поворот рулевого колеса. Когда говорят, что автомобиль обладает плохой управляемостью, это означает, что его реакция на поворот руля не соответствует ожиданиям водителя. При этом водителю необходимо делать дополнительные подруливания для того, чтобы достигнуть требуемой траектории движения. Управляемость автомобиля связана с таким его качеством, как поворачиваемость. Поворачиваемостью называют свойство автомобиля изменять управляемость по сравнению с автомобилем на «жестких» колесах. Есть две основные причины (изменения) поворачиваемости: увод колес, вызываемый поперечной эластичностью шин, и поперечный крен кузова, связанный с эластичностью подвески. Уводом называют качение колеса под углом к своей плоскости. Увод происходит из-за того, что шина обладает эластичностью. При наличии сил, действующих на автомобиль в поперечном направлении (ветер, сила тяжести на поперечном уклоне дороги, центробежная сила на повороте и т.д.), эластичность шины приводит к тому, что автомобиль двигается по дуге большего или меньшего радиуса, чем это обусловлено поворотом рулевого колеса. Величина увода зависит от характеристик и состояния колес. Каждой модели шины соответствует определенная характеристика сопротивления уводу. В зависимости от характеристик и состояния шин автомобиль приобретает различные свойства шинной поворачиваемости: - недостаточная поворачиваемость, при этом для поворота по определенному радиусу нужно повернуть управляемые колеса на угол несколько больший, чем если бы колеса не обладали эластичностью; - излишняя поворачиваемость, при этом управляемые колеса нужно повернуть на меньший угол, чем при жестких шинах. Автомобиль с недостаточной поворачиваемостью более устойчив и лучше сохраняет направление движения, чем автомобиль с излишней поворачиваемостью. Автомобиль с излишней поворачиваемостью более подвержен изменению направления движения. Под воздействием боковой (поперечной) силы (например, ветра) он может значительно отклоняться от заданной траектории движения. На повороте траектория автомобиля будет несколько круче, чем это задано углом поворота рулевого колеса. Явление излишней поворачиваемости проявляется и в случае, если давление в шинах передних колес больше, чем в задних, а также если центр тяжести автомобиля расположен ближе к задней оси. В ненагруженном состоянии большинство отечественных автомобилей имеют недостаточную поворачиваемость. При полной нагрузке, напротив, автомобили имеют излишнюю поворачиваемость. Явление поворачиваемости необходимо учитывать при перемене водителем типа подвижного состава, замене шин, изменении условий эксплуатации. При частичной замене шин, вышедших из строя, необходимо заменять их шинами того же размера и модели, так как шины одного и того же размера, но разных моделей могут иметь неодинаковые: типы рисунков протектора, радиусы качения, сцепные качества и другие эксплуатационные характеристики. Запрещается: установка на одну ось, на сдвоенные колеса и оси автомобиля, прицепа и полуприцепа шин диагональной и радиальной конструкции, а также шин с различными рисунками протектора; установка шин не рекомендованных моделей и конструкций; установка шин с износом протектора больше допустимого. Особое внимание необходимо обращать на величину давления в шинах и при утечке воздуха необходимо довести давление до нормы. Допускаемое отклонение давления в шинах - не более ±0,02 МПа (±0,2 кгс/см2) - для грузовых и не более ±0,01 МПа (±0,1 кгс/см2) -для легковых автомобилей. Креновая поворачиваемость связана с конструкцией подвески автомобиля. По аналогии с шинной поворачиваемостью креновая поворачиваемость может быть недостаточной и излишней. У автомобиля с излишней поворачиваемостью, на который действует поперечная сила, кривизна траектории непрерывно увеличивается, что приводит к уменьшению радиуса поворота. Однако, креновая поворачиваемость не может увеличиваться беспредельно, т.к. максимальное значение угла поперечного крена ограничено упорами. Креновая и шинная поворачиваемость тесно связаны и в зависимости от конструкции подвески креновая поворачиваемость либо усиливает, либо ослабляет влияние шинной поворачиваемости. Особенности управления автопоездом Управлять автопоездом значительно труднее, чем одиночным автомобилем. Это объясняется следующими причинами: увеличиваются вес и габариты автопоезда, путь разгона и торможения, затруднено маневрирование. Кроме того, во время движения прицеп периодически отклоняется от траектории движения автомобиля-тягача, что создает опасность столкновения при обгоне и разъезде со встречными транспортными средствами. При движении автопоезда в составе тягача и прицепа (или двух прицепов) водителю приходится (при прочих равных условиях) в большей степени заниматься корректировкой его движения. Это объясняется большей величиной поперечных колебаний звеньев автопоезда, большей габаритной длиной, наличием нескольких подвижных элементов, соединенных шарнирно, и рядом других особенностей управления автопоездом. Характер движения автопоезда может значительно меняться при изменении числа его звеньев, расположении груза, давлении в шинах, величины зазора в тягово-сцепном устройстве, скорости движения, дорожных условий и т.п. Указанные факторы влияют на величину динамического коридора автопоезда. Наиболее существенно влияние на увеличение динамического коридора оказывают скорость движения автопоезда, величина зазора в тягово-сцепном устройстве, состояние дорожного покрытия (неровное, скользкое, булыжное). Динамический коридор увеличивается также при движении автопоезда под уклон, снижении давления в шинах. Большое влияние на величину динамического коридора автопоезда оказывает снижение давления в шинах задних колес прицепа. При идентичных условиях прямолинейного движения разница в величинах динамического коридора для одиночного тягача и автопоезда может превышать 0,6 м. Увеличение динамического коридора автопоезда в значительной степени зависит от расположения груза на прицепе (особенно сзади). При выполнении погрузо-разгрузочных работ необходимо располагать груз на платформе прицепа и автомобиля по возможности равномерно. Если это по какой-то причине невозможно (например, при перевозке двух контейнеров, имеющих различный вес), то целесообразно более тяжелый груз размещать в передней части платформы прицепа. Несколько уменьшает динамический коридор автопоезда незначительное снижение давления в шинах передних колес прицепов. Влияние перечисленных параметров на курсовую устойчивость автопоезда приведено в табл. 6. Таблица 6
Существенно возрастает динамический коридор при увеличении числа прицепов. Маневрирование в местах погрузочно-разгрузочных работ требует от водителя специальных навыков и умений. Движение задним ходом на автопоезде сопряжено с риском непроизвольного разворота или складывания автопоезда. Складывание автопоезда может возникнуть и при резком торможении, в том случае, когда из-за неравномерности тормозных сил на различных колесах или из-за неодинакового сцепления колес с дорогой возникает боковое скольжение заднего моста полуприцепа автопоезда. Особенности управления переднеприводным автомобилем Переднеприводный автомобиль не только устроен по-другому, нежели автомобиль классической компоновки. Он отличается поведением на дороге, особенно на скользкой, и поэтому требует от водителя несколько иных навыков и специфических приемов управления. Это обусловлено наличием тягового усилия на передних колесах и приходящейся на них повышенной доли общей массы автомобиля. Прежде чем водитель сядет за руль переднеприводного автомобиля, ему необходимо усвоить особенности его поведения на дороге. Начнем с движения по прямой. Водитель заднеприводного автомобиля знает, что в этом случае, особенно при движении по скользкой дороге с высокой скоростью или при разгоне, задние колеса пытаются то и дело уйти в сторону. Это вызвано действием случайных боковых сил, возникающих от неровностей дороги, различий покрытия или от небрежной работы рулем. Задние колеса, будучи нагружены крутящим моментом, хуже сопротивляются воздействию боковых сил. Для сохранения курсовой устойчивости водителю приходится поворотами руля препятствовать развитию заноса, а если этих корректирующих действий недостаточно, то снижать скорость. Переднеприводный же автомобиль ведет себя по-другому. Он позволяет двигаться по скользкой дороге в прямом направлении на высокой скорости без заносов. В результате у водителя может притупиться его бдительность, что необходимо учитывать при управлении. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||