Второй закон Ньютона. Движение под действием постоянной силы. Машина Атвуда. Второй закон Ньютона. Движение под действием постоянной силы. Минобрнауки россии
 Скачать 0.55 Mb. Скачать 0.55 Mb.
|

 МИНОБРНАУКИ РОССИИ Егорьевский технологический институт (филиал) федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Московский государственный технологический университет «СТАНКИН» (ЕТИ ФГБОУ ВПО МГТУ «СТАНКИН») Факультет технологии и управления производствами Кафедра естественнонаучных дисциплин Второй закон Ньютона. Движение под действием постоянной силы. Машина Атвуда Методические указания к выполнению лабораторной работы ЕТИ. Ф.ЛР.02. г. Егорьевск 2014 Составители: _____________ В.Ю. Никифоров, ст. преподаватель ЕНД В методических указаниях рассмотрены основные понятия механики, кинематики и динамики поступательного и вращательного движений, изучение динамики поступательного движения связанной системы тел с учетом силы трения; определение ускорения свободного падения с помощью машины Атвуда, оценка роли трения как источника систематической погрешности при определении ускорения свободного падения на лабораторной установке. Методические указания предназначены для студентов 1 курса, обучающихся по направлениям подготовки бакалавров: 151900 Конструкторско-технологическое обеспечение автоматизированных машиностроительных производств, 220700 Автоматизация технологических процессов и производств, 280700 Техносферная безопасность для лабораторных работ по дисциплине "Физика. Методические указания обсуждены и одобрены на заседании учебно-методической группы (УМГ) кафедры ЕНД (протокол № ___________ от __________г.) Председатель УМГ _____________ Г.Г Шабаева Второй закон Ньютона. Движение под действием постоянной силы. Машина Атвуда
3.1 Изучить теоретический материал. 3.2 Определите массу m0 страгивающего перегрузка 3.3 Определите экспериментально зависимость времени падения t груза от высоты h. 3.4 Определите опытным путём зависимость времени падения t от массы m перегрузка. 3.5 По результатам измерений зависимости времени падения t груза от высоты h построить в осях координат х = 3.6 По результатам измерений зависимости времени падения t от массы m перегрузка в осях координат х = 3.7 По наклону прямой с помощью соотношения (44) определите ускорение свободного падения g и погрешность Dg. 3.8 Сделать вывод. Записать полученный результат в виде g= 3.9 Оформить отчет.
4.1 Основные понятия механики Изменение положения тела в пространстве по отношению к другим телам с течением времени называется механическим движением. Раздел физики, изучающий механическое движение, называется механикой. Раздел механики, изучающий движение тел независимо от причин, вызвавших это движение, называется кинематикой. При движении в пространстве точки тела описывают траектории. Простейшими видами механического движения являются поступательное движение (такое движение, при котором прямая, проведенная через любые две точки тела, перемещается параллельно самой себе) и вращательное движение (все точки тела описывают концентрические окружности вокруг общей оси). Во многих случаях движущееся тело можно рассматривать как материальную точку (если размеры тела малы по сравнению с расстояниями до других тел и его ориентация несущественна). Если это не оговорено особо, во всех задачах механики, рассматриваемых ниже, это условие выполняется, так что можно говорить о движении материальных точек. Например, расстояние от Земли до Солнца (1,5·108 км) много больше размеров как Земли (6,4·103 км), так и Солнца (7·105 км), поэтому с хорошей точностью можно рассматривать движение этих (и всех других) тел Солнечной системы как движение материальных точек. При изучении полета теннисного мяча можно во многих случаях пренебречь его размерами. Движение тела в пространстве математически описывается в произвольно выбранной системе отсчета. Система отсчета состоит из: 1. Тела отсчета О. 2. Системы координат (в данном случае декартовой). 3. Часов, синхронно идущих во всех точках пространства. 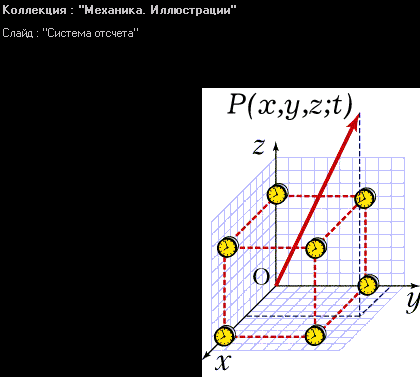 Рисунок 1 Система отсчёта С точки зрения наблюдателей в разных системах отсчета одно и то же движение может выглядеть совершенно по-разному. Механическое движение относительно. Положение материальной точки в пространстве в заданный момент времени определяется радиусом-вектором этой точки Задание декартовых координат x(t), y(t) и z(t) как функций времени определяет закон движения материальной точки. Частными случаями движения являются движение в заданной плоскости (для его описания достаточно двух координат x(t) и y(t)) и движение вдоль заданной прямой (ее всегда можно выбрать за ось x декартовой системы). 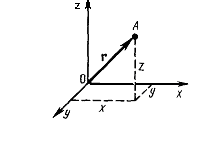 Рисунок 2 Радиус-вектор к заданной точке При движении материальной точки конец радиуса-вектора, проведенного в эту точку, описывает траекторию. Каждая точка траектории соответствует значениям координат x, y, z в данный момент времени. Например, при движении на плоскости траектория может быть задана как кривая, описываемая функцией y(x). Длина траектории между начальной и конечной точками называется путем, а вектор, соединяющий начальную и конечную точки траектории, называется перемещением. Если начальная и конечная точки заданы радиусами-векторами 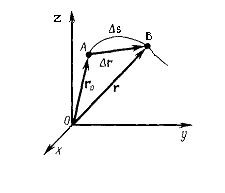 Рисунок 3 Траектория, путь, перемещение точки Напомним, что векторы складываются одним из двух эквивалентных способов: а) начала двух векторов совмещаются, и на этих векторах строится параллелограмм, диагональ которого равна сумме векторов (правило параллелограмма); б) начало второго вектора совмещается путем параллельного переноса с концом первого вектора, и проводится вектор, соединяющий начало первого и конец второго векторов. 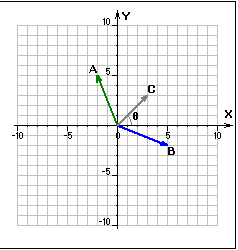 Рисунок 4 Траектория, путь, перемещение точки Если точка последовательно совершает несколько перемещений, то полное перемещение равно векторной сумме отдельных перемещений: Следует обратить внимание на то, что величина перемещения s = | Единицами измерения пройденного пути и времени в СИ являются метр (м) и секунда (с). Размерность какой-то физической величины обозначается символом этой величины в квадратных скобках. Таким образом, [l] = = м, [t] = с. 4.2 Кинематика равномерного поступательного движения Средняя скорость движения материальной точки за интервал времени Δt = t2 – t1 определяется как Здесь Размерность скорости: [υ] = м/с. Если движение таково, что средняя скорость за любой промежуток времени не меняется ни по величине, ни по направлению, то такое движение называется равномерным прямолинейным движением. В этом случае где Формула для перемещения при равномерном движении есть первый пример математической записи определенного физического закона. Этот закон имеет вид равенства одного вектора ( sx = υxt, sy = υyt, sz = υzt в произвольно выбранной декартовой системе координат. Другой тип математической записи физических законов, встречающийся в школьном курсе физики, – равенство одного числа (или скаляра) другому числу: А = В. Уравнения прямолинейного равномерного движения принимают наиболее простой вид в системе координат, одна из осей которой (например, ось x) направлена вдоль вектора скорости Уравнения прямолинейного равномерного движения вдоль оси x: sx = υxt или x – x0 = υxt. 4.3 Преобразования Галилея Всякое событие характеризуется координатами места, в котором оно произошло, и моментом времени, когда оно произошло, измеренными в определенной системе отсчета. Иными словами, событие характеризуется четырьмя координатами (x, y, z; t). Если одна система отсчета движется относительно другой равномерно и прямолинейно со скоростью V (для определенности, эта скорость направлена вдоль оси x), то координаты одного и того же события в этих системах связаны соотношениями: t = t', x = x' + Vt', y = y', z = z'. В векторной форме записи: t = t', Здесь Если принять, что точка Р движется равномерно и прямолинейно, то Скорость Этот закон, конечно, верен не только для равномерного, но и для произвольного движения. Таким образом, скорость тела Абсолютная скорость тела равна векторной сумме его относительной скорости и переносной скорости подвижной системы отсчета. Примером может служить движение лодки по реке. Скорость лодки относительно берегов является векторной суммой скорости лодки относительно воды и скорости течения воды.  Рисунок 5 Иллюстрация к закону сложения скоростей 4.4 Кинематика прямолинейного равноускоренного движения Мгновенная скорость неравномерного движения При уменьшении величины интервала Δt = t2 – t1 вектор Δ Ускорение неравномерного движения Направление вектора ускорения совпадает с направлением вектора изменения скорости за малый промежуток времени. Когда тело движется с переменной скоростью по криволинейной траектории, то направление ускорения по отношению к направлению скорости зависит от того, как меняется скорость: а) скорость возрастает, вектор ускорения образует острый угол с вектором скорости; б) скорость не меняется по величине, ускорение перпендикулярно скорости или равно нулю; в) скорость убывает, вектор ускорения образует тупой угол с вектором скорости. В любом случае вектор ускорения при движении по криволинейной траектории всегда имеет отличную от нуля проекцию, направленную в сторону искривления траектории. Размерность ускорения: [a] = м/с2. Пусть тело движется по прямой с переменной скоростью υ(t). Перемещение тела геометрически есть площадь под кривой υ(t) между двумя фиксированными точками во времени. Аналитически это перемещение определяется как  (10) (10)Если вектор ускорения а постоянен по величине и направлению, то движение называется прямолинейным равноускоренным движением. Если принять направление скорости тела за направление движения и выбрать ось х в эту же сторону, то основные формулы, определяющие равноускоренное движение для проекции на ось OX, примут вид: a  x = const, x = const,υx = υ0x + at, (11) sx = υ0xt + axt2/2, x = x0 + υ0xt + axt2/2. Знак проекции ускорения определяет характер движения: ax > 0 – равноускоренное; ax < 0 – равнозамедленное. Если исключить время t из уравнений для скорости υ и перемещения s прямолинейного равноускоренного движения, то получается формула, связывающая проекцию перемещения, скорость и ускорение (эта формула, конечно, верна при любом знаке a): У равнения равноускоренного прямолинейного движения в векторной форме:Важным случаем равноускоренного движения является свободное падение в поле тяжести Земли с постоянным ускорением g≈9,8 м/с2. Для описания такого движения удобно выбрать систему координат с осью y, направленной вертикально вверх. Тогда вектор ускорения ay = – g, υ y(t) = υy0 – gt, (14) y(t) = y0 + υ y0t – gt2/2. Эти формулы в равной степени справедливы как для случая падения тела с некоторой высоты, так и для случая бросания тела вверх с некоторой начальной скоростью. Пусть y0 = 0, υy0 = υ0 (тело брошено вертикально вверх с нулевой высоты в момент времени t = 0). В момент достижения максимальной высоты υy = 0. Этому соответствует момент времени, определяемый из уравнения: 0 = υy0 – gt*. (15) Итак, время движения брошенного вверх тела до достижения максимальной высоты (время подъема) t* = υ 0/g. (16) Максимальная высота равна 4.5 Кинематика равномерного вращения по окружности При движении по окружности с постоянной по величине линейной скоростью υ тело имеет направленное к центру окружности постоянное центростремительное ускорение aц = υ2/R, (18) где R – радиус окружности. |