Диплом навигационная прокладка Балтийск Севастополь. ВОТ ЭТОТ ДИПЛОМ. Навигационная гидрографическая и гидрометеорологическая характеристика районов плавания по маршруту перехода
 Скачать 164.18 Kb. Скачать 164.18 Kb.
|

|
Система “Лоран-С” Система “Лоран-С” является импульсно-фазовой разностно-дальномерной системой навигации. Работает на длинных волнах (λ=3000м, ƒ=100кгц). РНС “Лоран-С” разработана в США в конце 50-х годов. В настоящее время используется 10 цепочек станций, которые обслуживают северную часть Атлантического и Тихого океанов и Средиземное море. Береговые станции объединены в цепочки, каждая из которых имеет одну ведущую станцию и от 2 до 4 ведомых. Цепочки в пособиях и на радионавигационных картах обозначаются шифром, например: SL-1. Первые две буквы обозначают группу частот. Их существует 4: S – специальная SH – медленная высокая SL – медленная низкая SS – медленная специальная Каждая группа частот имеет 8 частот повторения, обозначаемых порядковым номером от 0 до 7. Ведущая станция имеет обозначение – М, ведомые станции соответственно: W, X, Y, Z. Период следования импульсов составляет 79 900 мсек. Для увеличения мощности сигнала, а следовательно, для увеличения дальность действия РНС, береговые станции измеряют пакет из 8 импульсов. Длительность каждого импульса 100-200 мксек, промежуток времени между импульсами 1000 мксек. Для быстрого опознавания ведущей станции на экране она излучает в пакете девятый (маркерный) импульс. Точность определения места судна днем по двум линиям положения составляет от 0.5 до 1.1 мили, ночью от 1.4 до 2.8 миль. Система “РСДН-3” Система “РСДН-3” или второе название “Чайка” являются разностно-дальномерной отечественной системой дальней радионавигации с временной селекцией сигналов, излучаемых береговыми станциями. Цепи системы состоят из одной ведущей станции и 3-4 ведомых, работающих с одинаковым, присвоенным только этой цепи, периодом повторения импульсом. Этот период повторения служит отличительным признаком цепи. Излучение сигналов береговыми станциями производится через антенны-магниты, высотой 200 м или антенны-полотна, подвешиваемые на башнях, высотой 200 м. Синхронизация сигналов ведущих станций по частоте и фазе производится сигналами ведущей станции. В зоне Балтийского моря точность плавания обеспечивает Восточно-Европейская цепь “РСДН-3”. Цепь состоит из ВЩ станции (г. Карачев) и четырех ведомых, расположенных в пунктах: Симферополь, Петрозаводск, Слоним, Сызрань. Они образуют 4 пары, Частотный параметр 8000 или SL-0. Дальность действия, на поверхностной волне 1300-1600 миль, на пространственной - до 2400 миль. Точность измерения параметра днем -0.8мксек, в ночное время - 1.5мксек. Спутниковая навигационная система “Глонасс” Система “Глонасс” – это российская космическая навигационная система, предназначенная для определения места потребителя в любое время суток, в любых г/метеорологических условиях, в любой точке Земли. Полная орбитальная структура системы “Глонасс” состоят из 24 спутников типа “Глонасс-М”, размещенных в трех орбитальных плоскостях. Орбитальные плоскости разнесены относительно друг друга на 120°. Плоскостям присвоены номера - 1,2,3. На каждой орбите размещено по 8 спутников. Расположенные между спутниками на орбите - 45°. Спутники первой орбиты имеют номера от 1 до 8, вторая с 9 по 16 и третья с 17 по 24. Период обращения спутников 11ч.15м.44с. Высота орбиты - 19 100км. Наклон орбиты относительно экватора -64°8. Вес спутника “Глонасс-М”- 1415 кг. Управление системой “Глонасс” осуществляет наземный комплекс управления, он включает в себя Центр управления системой (г.Краснознаменск, Московская область) и сеть станций слежения и управления, рассредоточенных по территории России. Наземный комплекс осуществляет сбор, накопления и обработку информации обо всех спутниках системы и навигационной информации, а также контроль за работой системы в целом. Управление спутниками осуществляется в автоматическом режиме. В системе “Глонасс” для определения места судна используется дальномерный метод, позволяющий измерить расстояние до спутника. Для реализации этого метода каждый спутник этой системы формирует и излучает кодированный сигнал одновременно на двух частотах. Сигнал с кодом ВТ на частоте ƒ1=1575 мгц – сигнал точного местоположения. Сигнал с этим кодом может быть принят только военными потребителями. Сигнал с кодом СТ – сигнал стандартной точности, принимается всеми гражданскими потребителями. На судах ВМФ в качестве приемоиндикаторов для определения места применяются ПИ “Шкипер” и “Бриз-К”. Спутниковая навигационная система “Навстар” СРНС “Навстар” – это американская система космической радионавигации предназначена для определения положения и ориентации сухопутных, воздушных и морских потребителей. СРНС “Навстар” состоит из космического сегмента, сегмента контроля и пользовательского сегмента. Космический сегмент образуют 24 спутника, которые находятся на шести орбитах (по 4 спутника на каждой) на высоте 20 200 км. Период их обращения составляет около 12 часов, угол наклона орбиты относительно плоскости экватора – 55 градусов. Система работает в двух режимах: режим PPS (высокая точность измерения) и режим SPS (стандартная точность измерений). Режим PPS используется военными и обеспечивает точность до 1 м, а режим SPS для всех потребителей и обеспечивает точность определения места до 100 м. Спутники системы используют свои сигналы на двух частотах: ƒ1=1227.6мгц (диапазон L1) и ƒ2=1575.4мгц 9 (диапазон L2). В диапазоне L1 измеряются сигналы, предназначенные для гражданских потребителей, а также сигналы военного кода “P” в режиме PPS. Диапазоне L2 передаются сигналы только военного кода. Сегмент контроля – это станции наблюдения, расположенные на Гавайях, островах Вознесения и Диего-Гарсия и других точках Земного шара, а также главная контрольная станция, расположенная на базе ВВС в Колорадо. Станции наблюдения следят за спутниками, записывая всю информацию об их движении. Эта информация передается на главную командную станцию для корректировки орбит и навигационной информации. Пользовательский сегмент – это приемники пользователей, где производится обработка данных и определение координат скоростей и времени. Глава 3 Анализ навигационной безопасности плавания. 3.1 Определение допустимой погрешности плавания. Важной характеристикой безопасности судовождения является величина погрешности в текущем месте судна. Однако она сама по себе без ее сопоставления с конкретной навигационной обстановкой не может служить показателем навигационной безопасности. Например: погрешность с текущем месяце, равна 1.5 мили, для открытого моря – нормально, а для плавания в узкости много. Основным показателем навигационной безопасности является допустимая погрешность плавания в данном районе. Допустимой погрешностью (Mд) называется предельная погрешность текущего места судна, при которой с заданной вероятностью безопасность плавания еще сохраняется. Допустимая погрешность зависит от района плавания. При плавании по фарватерам она имеет одно значение, а при плавании в открытом море – другое. В 1983г Международная морская организация (ИМО) приняла рекомендацию, в которой установлены следующие требования: В районах, в которых ограничена свобода маневра судна, при подходе к портам и при входе в них плавание, точность плавания должна устанавливаться в местных правилах плавания. В других районах допустимая погрешность места судна с вероятностью 95% не должна превышать 4% от расстояния до ближайшей опасности, при этом максимальное значение погрешности не должно превышать 4 мили. Величина максимальной погрешности плавания может задаваться, а может и не задаваться на период. Если она не была задана, то производится ее расчет по участкам маршрута перехода. При плавании в открытом море, но где имеются навигационные опасности, допустимая погрешность может быть рассчитана по формуле (1) МД ≤ ДR (мили) Где: МД – ожидаемая точность плавания, мили. Д – минимальное расстояние до навигационной опасности, мили. R – значение которое определяется из таблицы 1-В МТ-75 по заданной вероятности безопасного плавания при e = 1 При плавании по фарватеру, шириной d, за критерий безопасности плавания принимается предельно допустимая погрешность счислимого места по направлению перпендикулярному оси фарватера, равна половине его ширине (рис.) Рисунок №1. 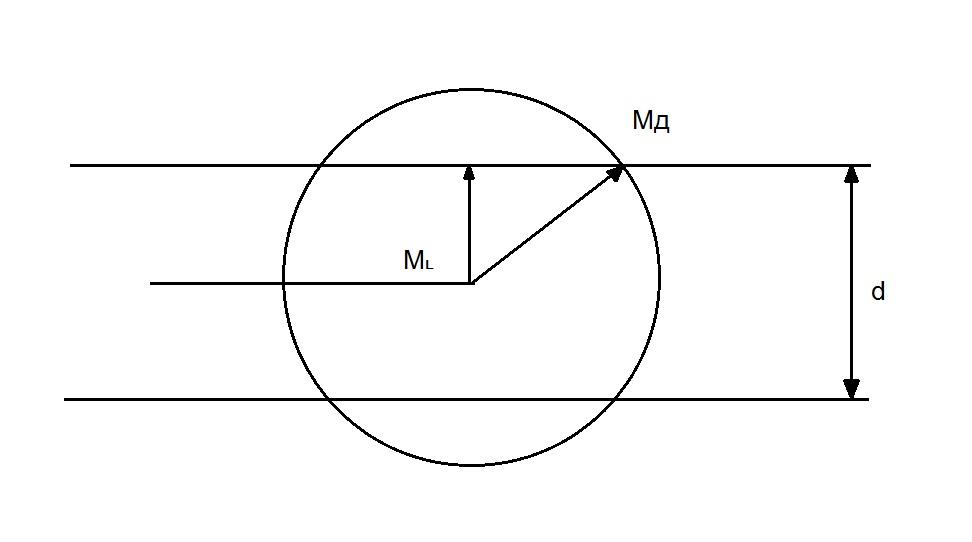 ML =  =ZML= 0,7 Mд отсюда: =ZML= 0,7 Mд отсюда:(2) Mд=  (мили) (мили)Где: Z –функция Лапласа, выбираемая из таблицы 1-б МТ-75 по заданной вероятности. При проходе узкости пролива, в которой навигационные опасности расположены по обе стороны линии пути, Мд можно определить по формуле (3): Mд<Д (мили) (3) Где Д –минимальное расстояние до навигационной опасности, лини. Величины допустимой погрешности разработаны приведены как в международных, так и наших региональных документах (МТ-2000) I. Международные нормативы точности судовождения: В дневное время – 2.0 мили В ночное время – 3.0 мили При плавании в прибрежной зоне Mд ≤ 2 мили При плавании по фарватерам Mд = 0.5 II. Отечественные нормативы: При плавании в зоне открытого моря – Mд = 2% от расстояния до навигационной опасности, но не более 2.0 миль. При плавании в прибрежных водах, в расстоянии от берега более 25 миль допускается погрешность не более 2.0 миль. При плавании по фарватерам шириной до 20 кбт. Mд = 0.2 ширины фарватера. Используя эти требования, принимаю для расчетов следующие величины допустимых погрешностей: I участок (Балтийское море) – Mд = 1.5 мили II участок (Балтийские проливы) – Mд = 0.5 мили III участок (Северное море) – Mд = 1.0 миля IV участок (Пролив Ла–Манш) – Mд = 0.5 мили V участок (Атлантический океан) – Mд = 2.0 мили VI участок (пролив Гибралтар) – Mд = 0.5 мили VII участок (Средиземное море) – Mд = 2.0 мили VIII участок (Эгейское море) – Мд= 2.0 мили IX участок (Пролив Дарданеллы) – Мд= 0.5 мили X участок (Мраморное море) – Мд= 2.0 мили XI участок (Пролив Босфор) – Мд= 0.5 мили XII участок (Черное море) – Мд= 2.0 мили 3.2 Расчет ожидаемой точности обсерваций. Рассмотрим возможные способы обсерваций по участкам перехода: Балтийское море Основной способ обсерваций: по ИФ РНС “РСДН-3” Контролирующие способы: по небесным светилам по спутниковым системам Балтийские проливы Основные способы: с использованием судовой РЛС визуальными способами Контролирующие способы: по спутниковым системам по круговым р/ маякам Северное море Основной способ обсерваций: по ИФ РНС “Лоран-С” Контролирующие способы: по спутниковым системам по небесным светилам Пролив Ла-Манш Основной способ: с использованием судовой РЛС Контролирующие способы: визуальные способы по спутниковым системам по круговым р/маякам Атлантический океан Основной способ: по ИФ РНС “Лоран-С” Контролирующие способы: по небесным светилам по круговым р/маякам по спутниковым системам Гибралтарский пролив Основной способ – с помощью судовой РЛС Контролирующие способы: визуальные способы по спутниковым системам Средиземное море Основной способ: по ИФ РНС “Лоран-С” Контролирующие способы: по спутниковым системам по небесным светилам с помощью судовой РЛС Эгейское море Основной способ: по ИФ РНС “Лоран-С” Контролирующие способы: по спутниковым системам с помощью РЛС по небесным светилам Пролив Дарданеллы Основной способ: по судовой РЛС Контролирующие способы: визуальные способы по круговым р/маякам по спутниковым системам Мраморное море Основной способ: по ИФ РНС “Лоран-С” Контролирующие способы: по спутниковым системам по небесным светилам с помощью РЛС Пролив Босфор Основной способ: с помощью РЛС Контролирующие способы: визуальные способы по круговым р/маякам по спутниковым системам Черное море Основной способ: по ИФ РНС “Лоран-С” Контролирующие способы: по спутниковым системам по небесным светилам с помощью РЛС Произведем расчеты ожидаемой точности обсерваций для различных способов обсерваций по средним величинам погрешностей навигационных параметров. ИФ РНС “РСДН-3” и “Лоран-С” Ср. кв. погрешность при определении места по этим светилам в среднем составляет при использовании приемоиндикатора “КПИ-5Ф” составляет: mu=0.8 мили – днем и mu= 1.5Мксек. – ночью При средних условиях величине ср. кв. погрешности линий положения составляет: М0 =  Значение ср. кв. погрешности обсерваций по ИФ РНС “РСДН-3” и “Лоран-С” приведены в таблице № 3 Таблица № 3
С использованием судовой РЛС (по трем ориентирам) Погрешность измеренного с помощью судовой РЛС “Наяда” расстояние на шкале 16 миль составляет 0.01 от шкалы дальности, т.е. МД =0.16 мили. Согласно хорошей морской практике обсервацию по РЛС для большей надежности рекомендуется производить по трем ориентирам. В этом случае погрешность обсервации определяется по формуле № 7 и составляет 0.19 мили. По визуальным пеленгам. Погрешность измерения компасного пеленга на береговой ориентир с помощью пеленгатора “ПГК-2” составляет mu = 0°,5. Погрешность линии положения визуального пеленга может быть рассчитана по формуле №8 (8) М0=  Для средних расстояний до ориентиров 8÷12 миль и mu = 0°,5 погрешность линии положения составит 0.09 мили. Произведем расчет ожидаемой погрешности точной обсервации по двум пеленгам при мили в зависимости от угла пересечения линий положения.
При определении места по трем пеленгам точность обсервации составляет Mo = 0.1 мили. По круговым р/маякам. При среднем расстоянии до радиомаяков в 50 миль погрешность обсервации по трем р/маякам составит Млп=  = = =1,3 мили, =1,3 мили,М0=1,2mлспр=1,6 мили При среднем расстоянии до р/маяков в 100 миль погрешность обсервации составляет: Mлп=  Мо=1,2Млпср=3,1 мили | ||||||||||||||||||||||||||||||||||||||||||