Исследование самозанятости населения в Российской Федерации: общие и частные проблемы.. Исследование. Нефтегазовый комплекс является одной из основных частей экономики Российской Федерации, так как он во многом определяет функционирование других отраслей промышленности, состояние экономики страны и доходы ее населения
 Скачать 0.74 Mb. Скачать 0.74 Mb.
|

|
Выводы по главе 1. Были рассмотрены схемы внешнего и внутреннего электроснабжения ДКС-1 НГМК. На данной подстанции установлено 10 синхронных двигателей СТДП-63000, составляющие 95% нагрузки подстанции. В связи с малой мощностью остальной нагрузки на рассматриваемой подстанции в данной работе будут рассмотрены меры по повышению надежности электроснабжения синхронных двигателей СТДП-6300 ДКС-1, так как их бесперебойная работа наиболее важна для технологического процесса НГКМ. Ввиду особенностей работы синхронных двигателей в режиме потери питания необходимо предусматривать выполнение устройств защиты от потери питания электродвигателей с использованием специальных схем, учитывающих поведение СД в аварийных режимах работы. Защиты, основанные на принципе контроля напряжения на шинах с СД, не могут обеспечить надежное срабатывание защиты. При этом необходимо также учитывать действие устройств АРВ синхронных двигателей, увеличивающих время снижения напряжения до установки соответствующих защит. Сохранение устойчивости узла нагрузки с СД возможно при времени полного цикла АПВ не более 0,3 с, что значительно меньше, чем среднее время срабатывании АВР на рассматриваемой подстанции. Скорость протекания переходных процессов в данном случае во многом зависит от параметров двигателя и точное время срабатывания АВР при котором возможна успешная ресинхронизация двигателя должно определяться при натурном или математическом моделировании переходных процессов. Ввиду опасности асинхронного режима работы необходимо обеспечивать защиту СД от выпадения из синхронизма, причем отключение двигателя должно происходить с минимальной выдержкой времени для минимизации негативных последствий такого режима работы для самого двигателя и внешней системы электроснабжения. Основной сложностью в быстрой ликвидации асинхронного режима является тот факт, что при переходных процессах в начальные моменты времени характер переходного процесса при сохранении устойчивости двигателя и при его выпадении из синхронизма практически не отличаются, что затрудняет реализацию опережающего отключения двигателя с целью предотвращения его выпадения из синхронизма. При обеспечении самозапуска СД необходимо обеспечить гашение поля СД при потере питания , так как при наличии возбуждения при восстановлении питания будет иметь место переходный процесс, обусловленный расхождением векторов ЭДС питающей системы и двигателя. Возникающие при этом токи сопоставимы по величине с пусковыми токами двигателя и могут негативно влиять на срок службы двигателя. 2. Моделирование системы электроснабжения ДКС-1 2.1 Расчет параметров модели. Как было отмечено в главе 1, для конкретных узлов нагрузки с СД значения токов, напряжений и скорость протекания переходных процессов могут быть установлены только при математическом или натурном моделировании. Следовательно, для оценки мероприятий по повышению надежности электроснабжения необходимо произвести разработку модели рассматриваемой подстанции, чтобы оценить эффективность тех или иных выбранных технических решений. В качестве среды моделирования был выбран математический пакет Simulink (MATLAB). Основным достоинством данного пакета является большое количество заранее заданных математических моделей элементов электроэнергетических систем, представленных в библиотеке SimPowerSystems. Кроме того, математическая модель, построенная в среде Simulink, позволяет наглядно наблюдать за всеми происходящими процессами и в случае необходимости оперативно изменять структуру модели, отражая изменения, произошедшие на реальном объекте. Исследования [9],[10],[11],[12] также подтверждают адекватность математических моделей электроэнергетических объектов, представленных в библиотеке SimPowerSystems пакета Simulink. Структурная схема модели представлена на рисунке 2.1 и состоит из следующих элементов: -модель источника питания (энергосистемы). Данная модель представляет собой источник питания и моделирует шины питающих подстанций «Пугачи» и «КТЭЦ»; -модель воздушной линии электропередачи. Модель введена для возможности симуляции режима короткого замыкания на одной из питающих линий; -модель трансформатора 110/10 кВ. Представляет собой математическое представление трансформаторов ГПП; -модель обобщенной электрической нагрузки. Представляет собой модель трансформаторных подстанций, подключенных к шинам 10 кВ. Введение данного типа нагрузки необходимо для возможности оценки устойчивости при КЗ на смежных с СД кабельных линиях. Кроме того, наличие несинхронной нагрузки существенно влияет на падение частоты генерируемого СД напряжения при потере питания, как было отмечено раннее; -Модель синхронного двигателя СТДП-6300; -Модель системы БАВР, защиты от потери питания и форсировки возбуждения представляют собой блоки, разработанные для данного исследования, и будут подробно рассмотрены в соответствующих подпунктах. 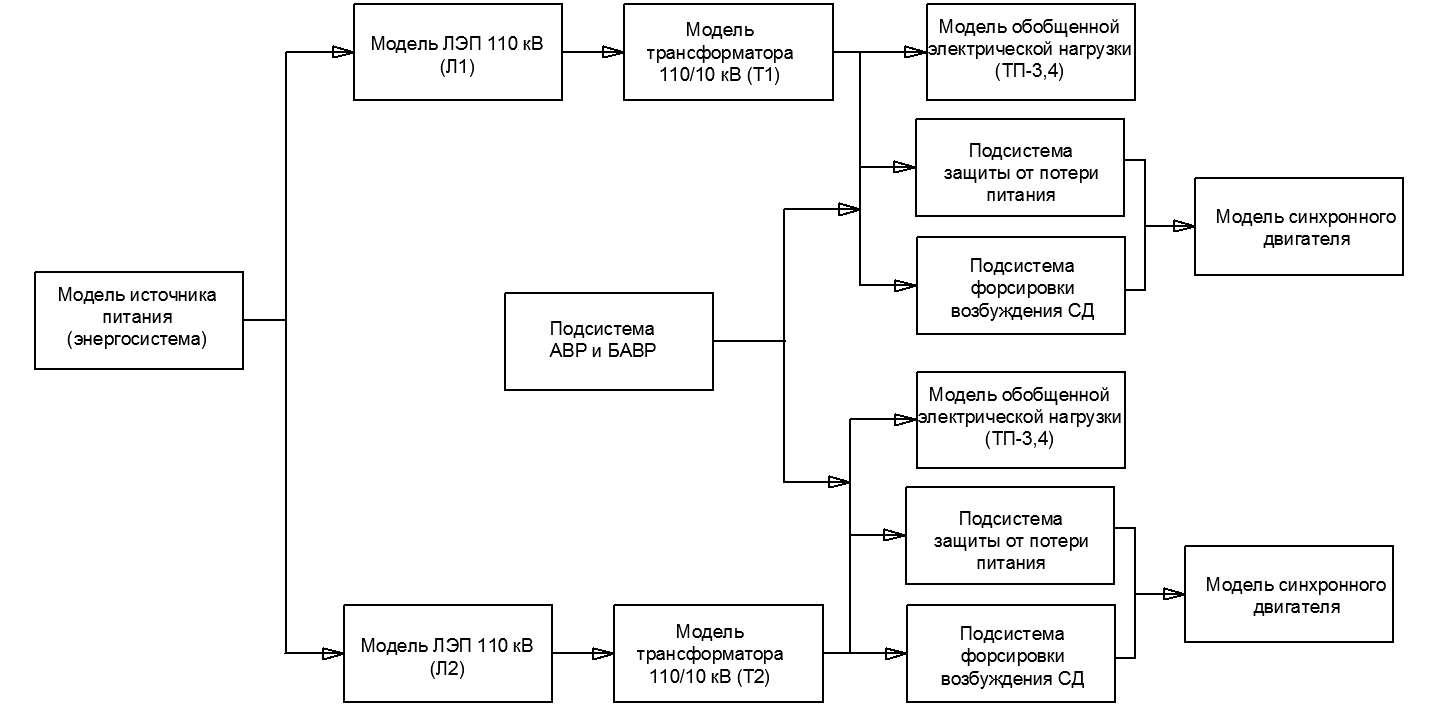 Рисунок 2.1 - Структурная схема разработанной модели. Рассмотрим более подробно каждый из элементов модели. 1)Модель питающей подстанции. Так как по сравнению с мощностями питающих подстанций «Пугачи» и КТЭЦ, мощность потребляемая электроустановками ДКС-1 достаточно мала и процессы, происходящие в вышестоящих элементах энергосистемы, в рамках данного исследования не представляют интереса, то допустимо моделировать шины рассматриваемых подстанций как источники бесконечной мощности. Для моделирования трехфазных источников в библиотеке Sim Power Systems используется стандартная модель 3phase source, схема замещения которой представлена на рисунке 2.2. 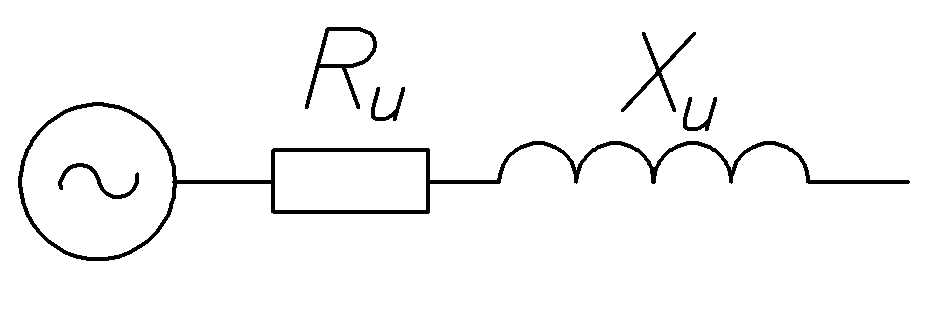 Рисунок 1 - Схема замещения источника. Параметры модели могут быть заданы непосредственно сопротивлением и индуктивностью источника, либо через мощность короткого замыкания на шинах подстанции и отношение реактивного и активного сопротивления системы [13]. Согласно сведениям, полученным от Оренбургских электрических сетей, ток трехфазного короткого замыкания на шинах ПС «Пугачи» составляет 16,672 кА, на подстанции КТЭЦ – 23,529 кА. Мощность короткого замыкания может быть найдена по формуле:
где IКЗ – уровень тока короткого замыкания, Uном – номинальное напряжение источника питания. Для подстанции Пугачи:
Для подстанции КТЭЦ:
В связи с тем, что согласно принятым методикам расчета параметров схем замещения питающей системы, активным сопротивлением питающей системы пренебрегают ввиду его малости, отношение реактивного и активного сопротивлений (X/К ratio) в модели принимаем равным бесконечности. Итоговый вид окна параметров модели питающей системы представлен на рисунке 2.2 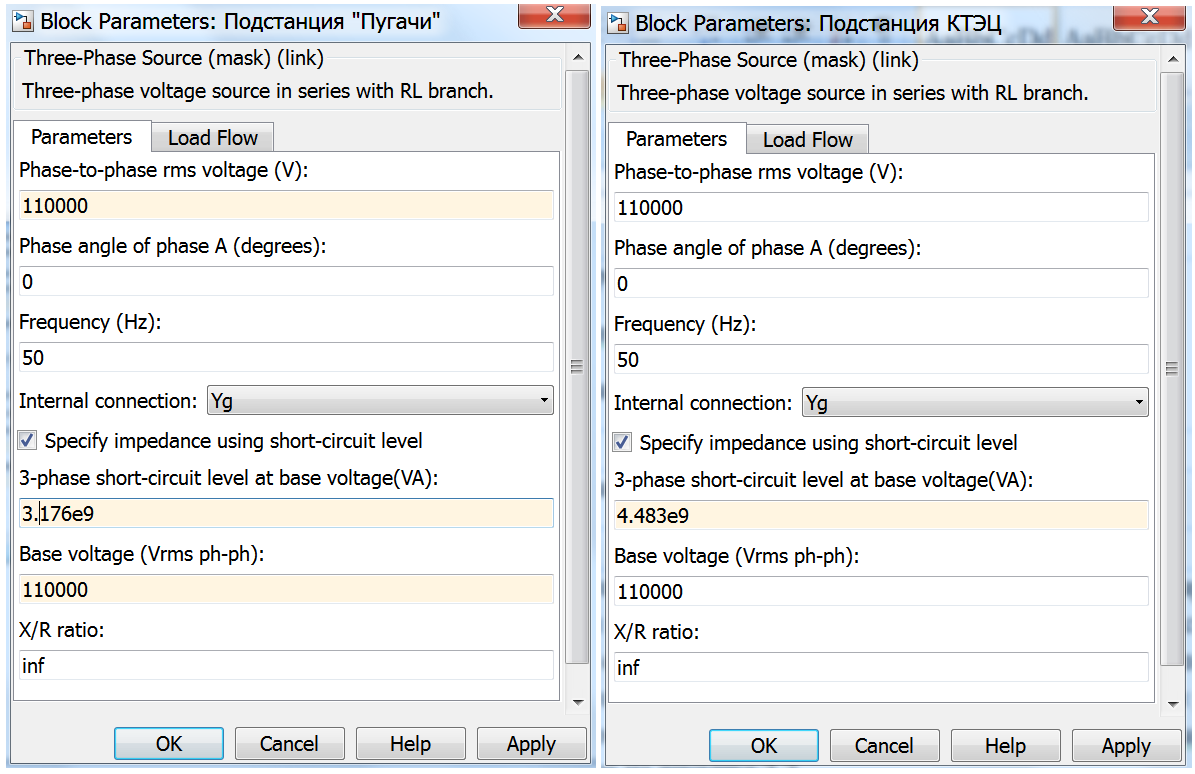 Рисунок 2.2 - Параметры модели питающей подстанции. 2)Модель линии электропередач 110 кВ. Согласно [14], линии электропередач напряжением 110-220 кВ и длиной до 400 км с достаточной точностью моделируются П-образной схемой замещения. В среде Simiulink был выбран блок 3phase PISectionLine, схема замещения которого представлена на рисунке 2.3 и соответствует П-образной схеме замещения воздушной линии. 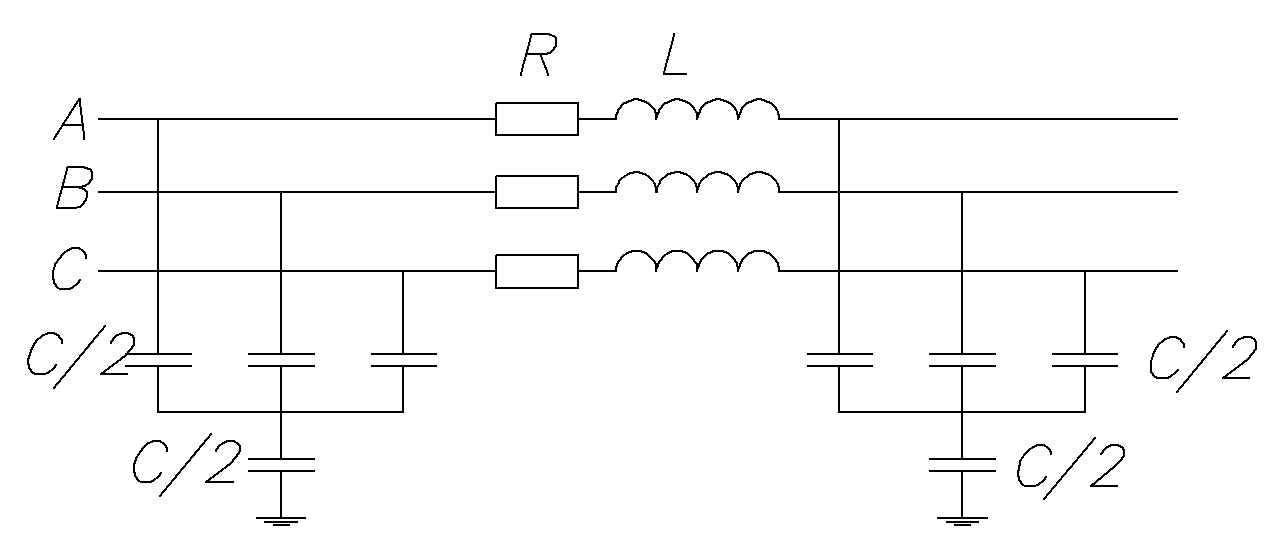 Рисунок 2.3 - Схема замещения воздушной ЛЭП. В качестве параметров блока задаются удельные сопротивления, индуктивности и емкости линии по прямой и нулевой последовательности, а также длина линии электропередач. Данные параметры были рассчитаны, исходя из справочных данных [15] и представлены в таблице 2.1. Таблица 2.1 – Параметры схемы замещения воздушных линий.
3)Модель трансформатора ТРДН-63000/110/10 Модель трансформатора с расщепленными обмотками выполнена на базе блока Three-Phase Transformer (Three Windings), схема замещения которого представлена на рисунке 2.4. 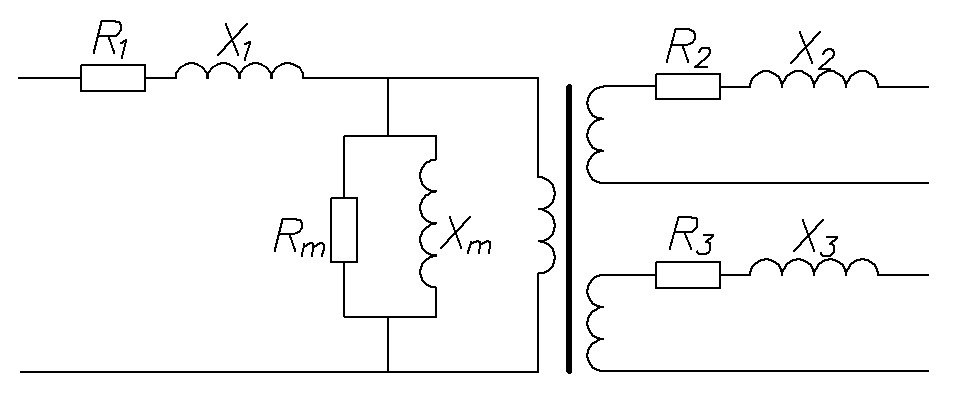 Рисунок 2.4- Однолинейная схема замещения трансформатора с расщепленными обмотками. Номинальные характеристики трансформатора приведены в таблице 2.2. Таблица 1.2 – Номинальные параметры трансформатора.
Расчет параметров схемы замещения трансформатора, проведен по методике, изложенной в [16]. Активное сопротивление обмотки ВН трансформатора:
Активное сопротивление обмоток НН, трансформатора:
Индуктивное сопротивление обмотки ВН трансформатора:
где  - коэффициент расщепления обмоток НН трансформатора. - коэффициент расщепления обмоток НН трансформатора.
Индуктивное сопротивление обмоток НН:
Активная проводимость ветви намагничивания трансформатора:
Реактивная проводимость ветви намагничивания трансформатора:
Активное сопротивление ветви намагничивания трансформатора:
Индуктивность ветви намагничивания:
Рассчитанные параметры схемы замещения трансформатора приведены в таблице 2.3. Сопротивления обмоток НН равны между собой и приведены к соответствующему напряжению. Таблица 2.3 - Параметры схемы замещения трансформатора.
4)Модель синхронного двигателя СТДП-6300 Стандартная модель синхронной машины, представленная в Simulink, позволяет моделировать как синхронные двигатели, так и синхронные генераторы, в зависимости от знака приложенной к машине механической мощности (положительная для работы в режиме генератора, отрицательная для работы в режиме двигателя). Электрическая схема используемой модели представлена на рисунке 2.5 и описывается системой дифференциальных уравнений (2.13).  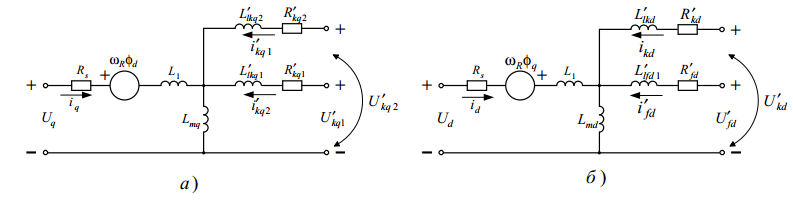 Рисунок 2.5 - Схема замещения СД, используемая в системе MATLAB. а - схема замещения по оси q. б - схема замещения по оси d.
В системе (2.13) и на рисунке 2.5, величины с индексами d и q относятся к соответствующим синхронным осям координат, величины с индексомr и s относятся к ротору и статору соответственно, величины с индексами l и m относятся к цепям рассеивания и намагничивания соответственно, величины с индексом f относятся к обмотке возбуждения, а с индексом k – к демпферным обмоткам. Механическая часть синхронной машины описывается зависимостями:
где  - отклонение частоты вращения двигателя от синхронной скорости; - отклонение частоты вращения двигателя от синхронной скорости;Н – постоянная инерции двигателя; Tm – механический момент двигателя; Te – электромагнитный момент двигателя; Kd – коэффициент, учитывающий влияние демпферных обмоток;  - скорость вращения ротора двигателя, - скорость вращения ротора двигателя, - синхронная частота вращения. - синхронная частота вращения. - электрический угол нагрузки - электрический угол нагрузкиPm – механическая мощность на валу двигателя;  - коэффициент демпфирования. - коэффициент демпфирования.Анализ исследовательских работ в данной области [17], [18] показывает, что модель синхронного двигателя, представленная в пакете MATLAB дает адекватные результаты при моделировании переходных процессов, происходящих в синхронных двигателях, что позволяет использовать ее для решения поставленной в исследовании задачи. В таблице 2.4, представлены параметры двигателя, полученные от завода изготовителя и из справочной литературы [19]. Так как для корректной работы математической модели синхронного двигателя все параметры должны быть представлены в именованных единицах, а в данных завода изготовителя они представлены в относительных единицах, необходимо выполнить пересчет параметров. Кроме того, величины сопротивлений обмотки возбуждения и сопротивлений демпферной обмотки должны быть приведены к значению сопротивлений, рассматриваемых со стороны статора двигателя. Дальнейшие расчеты указанных величин осуществлялись в соответствии с методикой описанной в справочных данных пакета MATLAB. Таблица 2.4 – Параметры двигателя СТДП-6300.
За базисное напряжение для расчета принимается амплитудное значение фазного напряжения двигателя:
За базисную мощность принимается номинальная активная мощность двигателя: Pб=6300 кВт. Тогда базисный ток:
Базисное сопротивление:
Базисная индуктивность:
Где f=50 Гц – частота питающей сети.
Сопротивление статора в именованных единицах:
Сопротивление рассеяния обмотки статора:
Индуктивность рассеяния обмотки статора:
Аналогично находятся индуктивности статора по продольной и поперечной оси:
Сопротивления обмотки возбуждения также должны быть переведены в именованные единицы и приведены к величинам обмоток статора. Базисный ток возбуждения двигателя:
Базисное напряжение возбуждения:
Базисное сопротивление обмотки возбуждения:
Базисная индуктивность обмотки возбуждения:
Коэффициент приведения к статору:
Активное сопротивление обмотки возбуждения, приведенное к статору:
Индуктивность обмотки возбуждения, приведенная к статору:
5)Модель устройства АРВ синхронного двигателя Для питания обмотки возбуждения синхронного двигателя используется бесщеточное возбудительное устройство типа БВУП-3УХЛ4 с возбудителем типа ВСП-80-3000, параметры которого приведены в таблице 2.5. Таблица 2.5 - Основные параметры возбудителя БВУП-3УХЛ4
Устройство возбуждения обеспечивает: -автоматическую подачу возбуждения в функции пускового тока при прямом и реакторном пуске двигателя; -автоматическое изменение тока возбуждения пропорционально току статора; -пусковую и релейную форсировку тока возбуждения двигателя, кратностью не менее 1,4 при снижении напряжения на выводах двигателя до 80% от номинального значения. В модели синхронного двигателя, представленной в библиотеке SimPowerSystems пакета MATLAB ток возбуждения задается не напрямую, а в виде напряжения, приложенного к обмотке возбуждения двигателя. Причем при задании всех параметров модели двигателя, модель указывает какое напряжение возбуждения необходимо приложить для работы двигателя в режиме холостого хода. В соответствии с выбранными параметрами модели синхронного двигателя, напряжение возбуждения двигателя в режиме холостого хода составляет 7,337 В. Для рассматриваемой задачи, с целью учета влияния действия устройства АРВ предлагается использовать упрощенную модель устройства АРВ пропорционального действия, обеспечивающее форсировку тока возбуждения двигателя при снижении напряжения на его зажимах. В соответствии с параметрами используемого возбудительного устройства, ток возбуждения увеличивается в 1,4 раза при снижении напряжения на зажимах двигателя до 80% от номинального значения. Так как ток возбуждения прямо пропорционален напряжению возбуждения, то в модели предполагается увеличивать напряжение возбуждения до значения 10,272 В при падении напряжения на шинах питания двигателя до 8000 В. Модель устройства АРВ, реализованная в Simulink, представлена на рисунке 2.6. 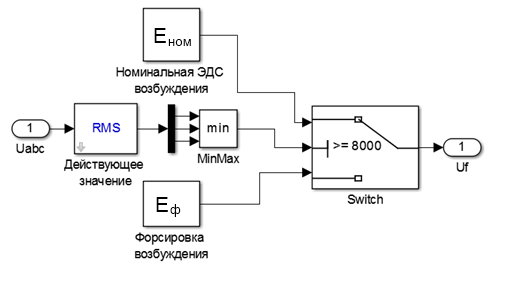 Рисунок 2.6- Модель системы АРВ двигателя. Представленная модель учитывает действующие значения напряжения на шинах питания двигателя и в том случае, если напряжение, хотя бы в одной из фаз оказывается менее чем 8000В, увеличивает ЭДС возбуждения в 1,4 раза. Стоит отметить, что разработанная модель имеет следующие допущения: -не учитываются погрешности измерительных трансформаторов тока: устройство форсировки возбуждения получает точную информацию о напряжении на шинах; -отсутствует замедление срабатывания. При достижении напряжением величины 0,8·Uном форсировка возбуждения срабатывает мгновенно; -не учитывается коэффициент возврата реле форсировки возбуждения. При превышении напряжением величины 0,8·Uномфорсировка возбуждения отключается мгновенно. Как показало моделирование переходных процессов в СД, проведенное в параграфе 2.2, указанные допущения не влияют на точность полученной модели. Также при моделировании были приняты следующие допущения: -подстанции ТП-3 и ТП-4 моделировались в виде активно-индуктивных нагрузок мощностью 1000 и 1600 кВА, соответственно с коэффициентом мощности cosφ=0,9. -сопротивление шин ГПП и кабельных линий, по которым питаются синхронные двигатели, не учитывалось в виду их малой длины и незначительного влияния на характер переходного процесса. -в связи со сложностью расчетов, моделирование проводилось только для двух секций шин 10 кВ ГПП.В связи с тем, что оставшиеся две шины симметричны по составу нагрузки, можно сделать вывод о том, что переходные процессы на них будут проходить аналогичным образом. -в связи с тем, что переходные процессы на каждом из двигателей носят одинаковый характер, далее рассматриваются процессы применительно к одному из двигателей 1 с ш. ДКС-1. Итоговый вид полученной модели представлен на рисунке 2.7. 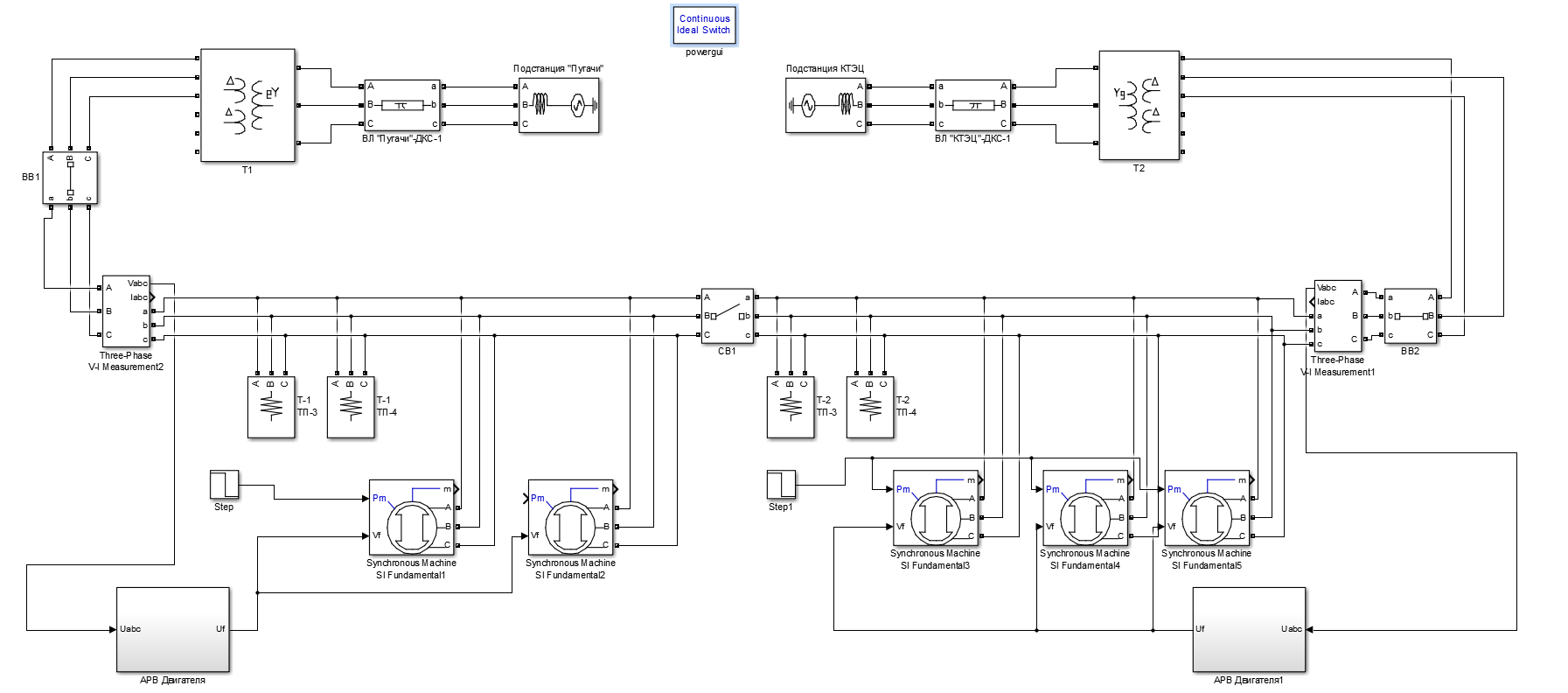 Рисунок 2.7 - Модель системы электроснабжения ДКС-1, разработанная в среде Simulink |