Исследование самозанятости населения в Российской Федерации: общие и частные проблемы.. Исследование. Нефтегазовый комплекс является одной из основных частей экономики Российской Федерации, так как он во многом определяет функционирование других отраслей промышленности, состояние экономики страны и доходы ее населения
 Скачать 0.74 Mb. Скачать 0.74 Mb.
|

|
2.2. Проверка адекватности полученной модели. Для проверки адекватности разработанной модели был произведен следующий эксперимент. Процесс пуска двигателя моделируется упрощенно – предполагается, что в начальный момент времени двигатель был разогнан до под синхронной частоты вращения и на обмотку возбуждения подается номинальный ток возбуждения. Таким образом, двигатель втягивается в синхронизм и выходит в номинальный режим работы. Через 15 секунд от начала моделирования отключается питающий ввод двигателя, моделирую потерю питания двигателя. Затем, через 0,2 секунды включается секционный выключатель, возобновляя работу двигателя. Таким образом, производится упрощенное моделирование процесса запуска двигателя и процесс его самозапуска при кратковременной потере питания. Характер процессов в данных режимах хорошо изучен, и результаты моделирования позволят сделать вывод об адекватности разработанной модели. Результаты моделирования для основных параметров двигателя представлены на рисунке 2.8. Зона до линии А соответствует процессу асинхронного пуска двигателя. Вертикальная линия Б соответствует моменту отключения питания двигателя, линия В – моменту восстановления питания. 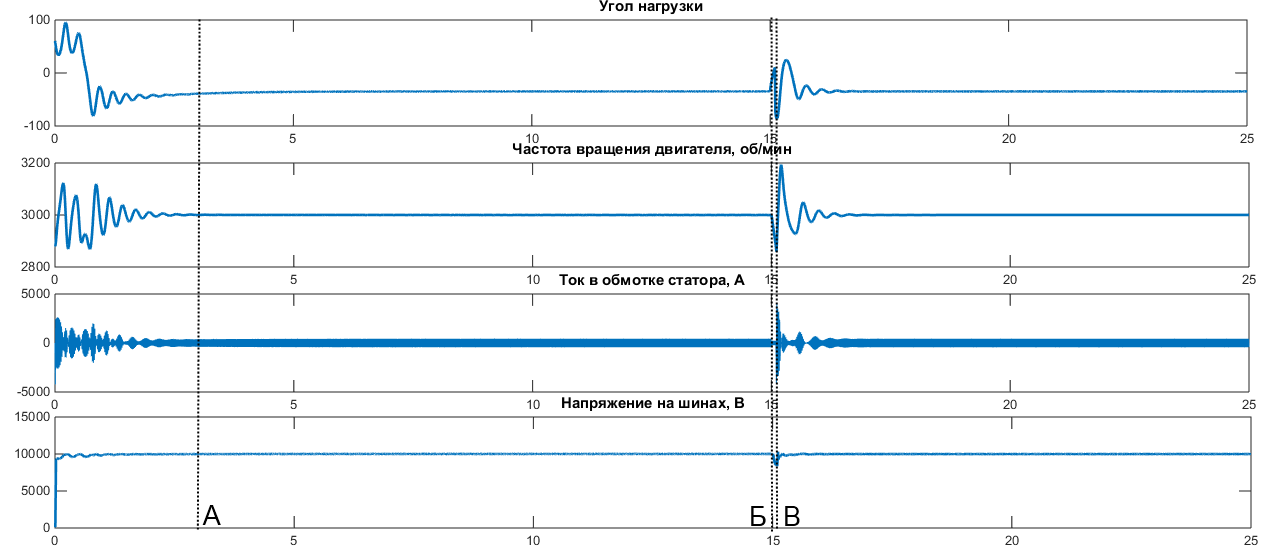 Рисунок 2.8 - Изменение параметров синхронного двигателя во время процессов пуска и самозапуска, полученное в результате процесса моделирования. Рассмотрим подробнее изменение каждого из параметров работы двигателя. На рисунке 2.9 представлен график изменения скорости вращения двигателя. Процесс асинхронного пуска двигателя в данной модели пропущен, принято допущение, что двигатель стартует с частоты вращения 2850 об/мин, что составляет 95% от синхронной частоты вращения. В момент времени 0с на двигатель подается питание и возбуждение, таким образом двигатель начинает втягиваться в синхронизм. В момент времени 0,5 с на двигатель подается механическая нагрузка равная 80% от его номинальной мощности. На графике переходного процесса это отражено уменьшением скорости вращения двигателя в указанный момент времени. В момент перерыва питания (t=15 с) двигатель начинает затормаживаться за счет момента нагрузки приводимого механизма. Как видно из соответствующего графика, за время отсутствия питания, напряжение на шинах ГПП не успевает опуститься до значения 0,8Uном и устройство АРВ не срабатывает – скорость вращения двигателя падает пропорционально времени, прошедшему с момента начала перерыва питания. 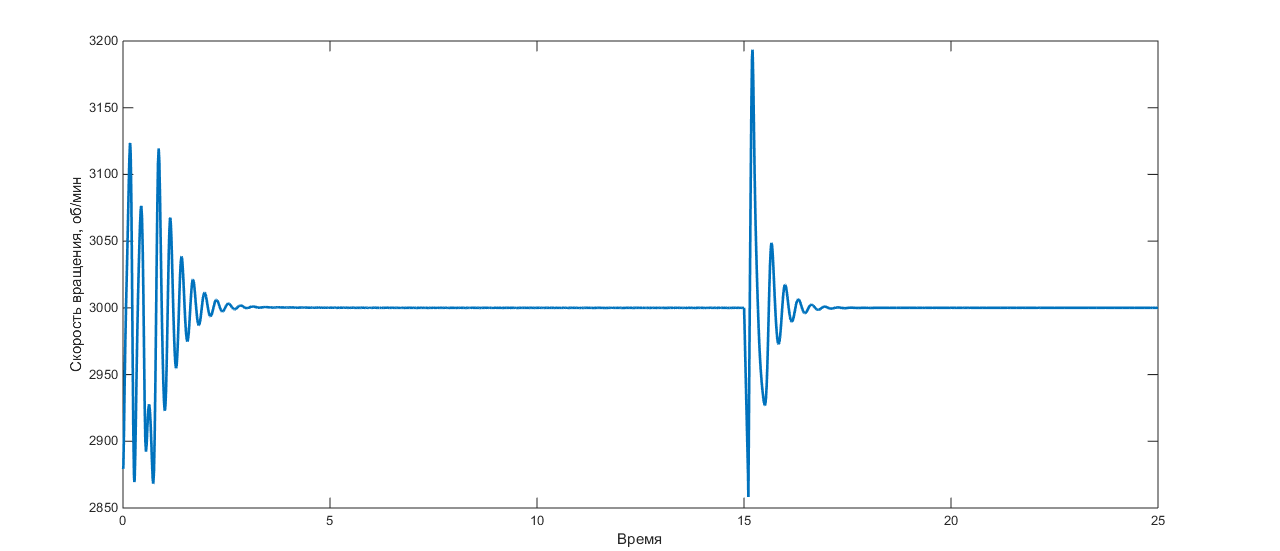 Рисунок 2.9 - График изменения скорости вращения двигателя. После восстановления питания вновь происходит переходный процесс разгона двигателя до синхронной частоты вращения. График изменения тока в статоре двигателя представлен на рисунке 2.10. 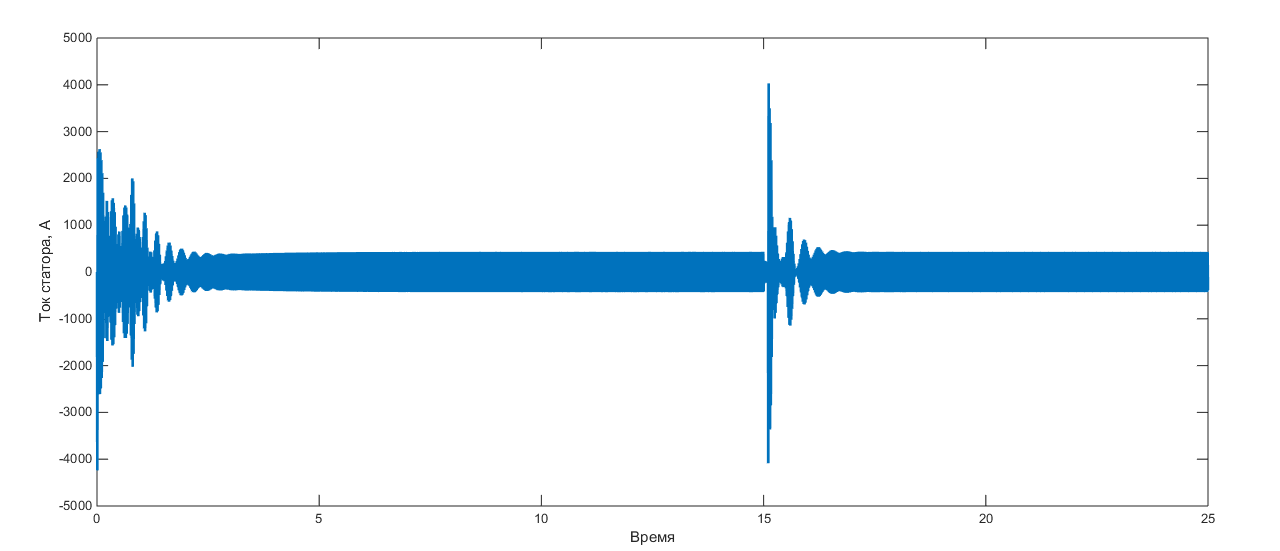 Рисунок 2.10 - График изменения тока в статоре синхронного двигателя. На рассматриваемом графике представлен график изменения тока в фазе А статора синхронного двигателя. Характер изменения тока в остальных фазах аналогичен и отличается только углом и в связи с этим не приводится. Повышение тока в начальный момент времени носит характер затухающих колебаний и представляют собой процесс пуска синхронного двигателя. В момент перерыва питания ток в двигателе уменьшается, но не до нулевых значений, так как благодаря накопленной механической энергии двигатель работает в генераторном режиме и питает несинхронную нагрузку своей секции шин. При восстановлении питания происходит бросок тока двигателя, связанный с несинхронным включением двигателя в сеть – значение и угол внутренней ЭДС двигателя не совпадают с соответствующими значениями питающей сети, что приводит к возникновению уравнительных токов большой величины, что видно на представленном графике. После завершения процесса самозапуска двигателя, ток в обмотке статора устанавливается в районе номинального значения, что говорит об успешном самозапуске двигателя. График изменения действующего значения напряжения на шинах ГПП, представлен на рисунке 2.11. 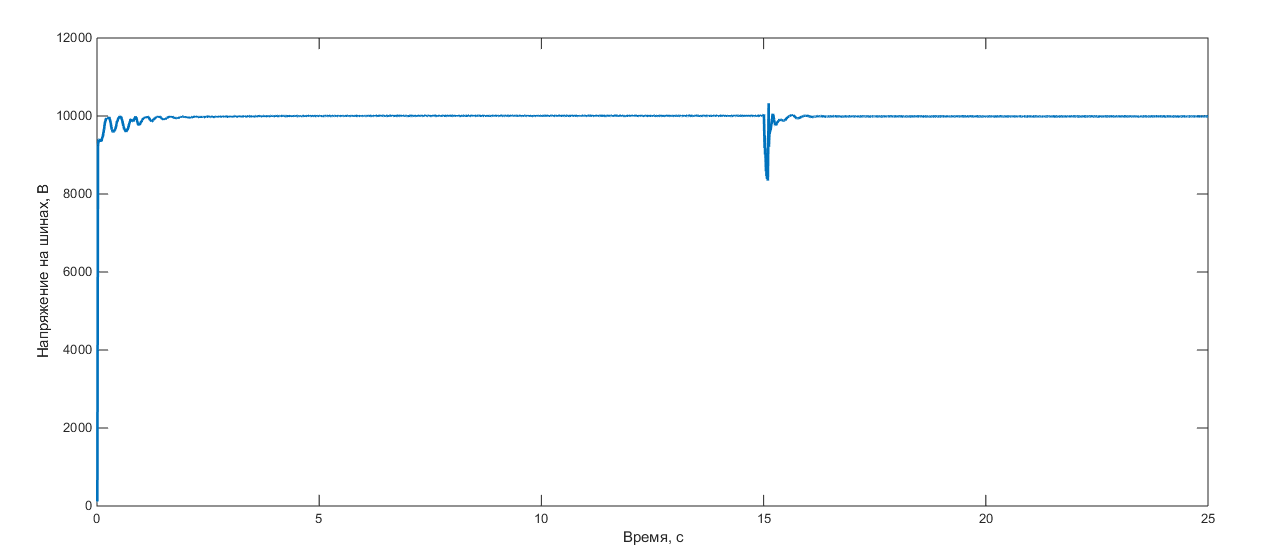 Рисунок 2.11 - График изменения напряжения на шинах ГПП. На представленном графике видна небольшая просадка напряжения в момент пуска двигателя, после завершения пускового процесса устанавливается номинальное напряжение на шинах. В момент отключения питания, снижение напряжения на шинах ГПП происходит не моментально за счет перехода синхронного двигателя в генераторный режим работы. В связи с небольшим перерывом питания, напряжение не успевает уменьшиться до значений, достаточных для срабатывания устройства АРВ. После восстановления напряжения процесс носит пусковой характер – наблюдается незначительное уменьшение напряжения, затем в процессе самозапуска, колебания затухают и значение напряжения вновь устанавливается на номинальном значении. На рисунке 2.12 представлен график изменения угла нагрузки синхронного двигателя во время рассматриваемого процесса. 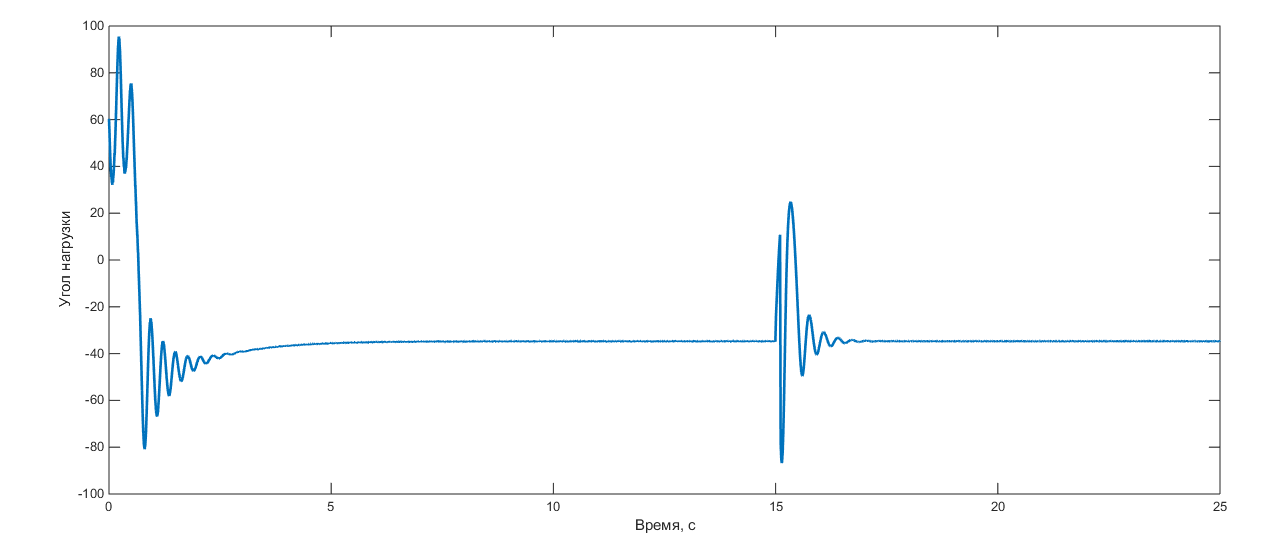 Рисунок 2.12 - График изменения угла нагрузки синхронного двигателя. В момент пуска двигателя, частота вращения векторов ЭДС питающей системы выше, чем частота вращения внутренних ЭДС двигателя, что соответствует положительному углу нагрузки и затухающему характеру его колебаний. После пуска значение угла нагрузки принимает установившееся отрицательное значение, что соответствует работе синхронной машины в режиме двигателя. В момент перерыва питания, угол нагрузки переходит в область положительных значений, что соответствует работе синхронной машины в режиме генератора, однако после восстановления питания изменение угла нагрузки носит характер затухающих колебаний, что соответствует переходному процессу без потери устойчивости. Выводы по главе 2. В качестве инструмента моделирования переходных процессов в синхронном двигателе был выбран пакет Simulink системы MATLAB. Анализ исследований в данной области показывает, что представленные в библиотеке SimPowerSystems математические модели элементов электротехнических систем дают адекватные результаты при моделировании переходных процессов. Также достоинством используемой программы является ее наглядность и возможность быстрого изменения параметров элементов системы электроснабжения для моделирования различных переходных процессов. Были рассчитаны параметры математических моделей следующих элементов системы электроснабжения ДКС-1: -питающие подстанции «Пугачи» и «КТЭЦ» представлены в виде источников бесконечной мощности, сопротивление которых найдено исходя из значений токов короткого замыкания на шинах подстанции; -питающие воздушные линии. Введены в модель П-образной схемой замещения с учетом сопротивлений нулевой последовательности, что позволяет моделировать режим однофазных и двухфазных коротких замыканий. -трансформаторы ГПП. Представлены в виде схемы замещения трансформаторов с расщепленной обмоткой с учетом ветви намагничивания. -синхронный двигатель. Модель синхронного двигателя базируется на встроенной модели, используемой в системе Simulink, учитывающей влияние демпферных контуров и учитывающей по три контура в каждой из синхронных осей. Анализ исследований в рассматриваемой области показал, что использование данной модели дает адекватные результаты при моделировании переходных процессов, происходящих в синхронном двигателе. 3) Были разработаны модели следующих подсистем электроснабжения ДКС-1: -модель устройства АРВ синхронного двигателя. В качестве прототипа была принята логика работы АРВ пропорционального действия, учитывающая параметры устройства возбуждения типа БВУП-3УХЛ4 с возбудителем типа ВСП-80-3000, используемого на синхронных двигателях ДКС-1. -Модель устройства автоматического ввода резерва. Разработана математическая модель устройства АВР с действием по факту снижения напряжения и частоты с выдержкой времени и контролем отсутствия встречного напряжения. 4)Было произведено моделирование процессов асинхронного пуска СД и его самозапуска после перерыва питания в течение 0,5 секунды. Анализ полученных в результате моделирования результатов доказывает правильность расчета параметров математических моделей элементов системы электроснабжения ДКС-1 и адекватность выбранных моделей, что позволяет производить оценку эффективности мер по повышению надежности электроснабжения ДКС-1 с использованием разработанной модели. Заключение В соответствии с поставленной целью и задачами были проведены вычислительные и экспериментальные исследования. Были рассмотрены схемы внешнего и внутреннего электроснабжения дожимно-компрессорной станции нефтегазоконденсатного месторождения, сделан вывод о существенном влиянии поведения синхронных двигателей СТДП-6300 на надежность функционирования технологических установок ДКС-1. Были рассмотрены следующие переходные режимы работы синхронных двигателей: режим потери питания, режим потери устойчивости, режим самозапуска двигателей. Было проанализировано поведение синхронных двигателей в соответствующих режимах работы, закономерности изменения их режимных параметров, сделан вывод о необходимости математического моделирования системы электроснабжения ДКС-1 с целью определения параметров переходных процессов при возмущениях во внешней системе электроснабжения, а также с целью определения границ устойчивости двигателя. Для моделирования была выбрана среда Simulink, пакета MATLAB. Для модели были рассчитаны параметры схем замещения питающих подстанций, воздушных линий электропередачи, питающих трансформаторов ТРДН-63000, на основе паспортных данных рассчитаны переходные и статические параметры двигателя СТДП-63000. Также был разработан блок, моделирующий действие устройства автоматического регулирования возбуждения синхронного двигателя. Моделирование поведения двигателя в переходных режимах синхронного пуска и самозапуска показало адекватность разработанной модели для анализа границ устойчивости двигателя. С помощью полученной модели был проведен ряд экспериментов, направленных на определение допустимого времени перерыва питания синхронного двигателя, при котором он остается в синхронизме. По полученным результатам, для успешного самозапуска двигателя, время ввода резервного питания должно составлять не более чем 0,1 с при номинальной загрузке двигателя. При провале напряжения питания электродвигателя до величин не менее, чем 0,4Uном, успешный самозапуск возможен при длительности провала до 1с, чего достаточно для устранения возмущения, приводящего к провалу напряжения действиями РЗА. При более глубоких провалах переходные процессы протекают аналогично процессам при полной потере питания и требуют восстановления питания за время не превышающее 0,2 секунды. Были разработаны мероприятия по повышению надежности электроснабжения синхронных двигателей ДКС-1, включающие в себя внедрение быстродействующего автоматического ввода резерва для успешного самозапуска синхронных двигателей в случае потери питания и срабатывании устройства АВР. В качестве резерва предложено использование схемы противоаварийной автоматики для автоматической ликвидации последствий кратковременных перерывов внешнего электроснабжения с помощью АВР и АПВ СД с пуском от защиты от потери питания и функцией опережающего отключения двигателей при потере устойчивости. Были рассчитаны уставки соответствующих защит и предложена схема защиты от потери питания СД. Согласно анализу проведенных экспериментов и исследований других учены, данный комплекс мер позволяет исключить выпадение двигателей из синхронизма при кратковременных перерывах питания Также была рекомендована замена устройства автоматического регулирования возбуждения двигателя на статическое устройство с возможностью контроля тока возбуждения по различным режимным параметрам двигателя. Данное решение позволит увеличить статическую и динамическую устойчивость двигателей. Был произведен экономический расчет окупаемости внедрения устройства БАВР, показавший, что срок окупаемости составит 2,93 года, а следовательно данное мероприятие можно считать экономически эффективным. Список использованных источников Правила устройства электроустановок (ПУЭ), издание седьмое (утверждено приказом Министерства энергетики Российской Федерации от 8 июня 2002 г. № 204) Беляев А. В. Автоматика и защита на подстанциях с синхронными двигателями и частотно регулируемыми электродвигателями большой мощности: учебное пособие: в 2-х ч. - СПб.: ПЭИПК, 2014 - Ч.1. - 72с. Беляев А. В. Автоматика и защита на подстанциях с синхронными двигателями и частотно регулируемыми электродвигателями большой мощности: учебное пособие: в 2-х ч. - СПб.: ПЭИПК, 2014 - Ч.2. - 56с. Ульянов С.А. Электромагнитные переходные процессы. Учебник для электротехнических и энергетических вузов и факультетов. - М.: «Энергия», 1970 Михалев, С.В. Повышение устойчивости синхронных двигателей при кратковременной потере питания / Н.Д. Поляхов, С.В. Михалев // Известия СПбГЭТУ «ЛЭТИ». – 2012. – №10. С. 62 – 68 Слодарж, М.И. Режимы работы, релейная защита и автоматика синхронных двигателей/ М.И. Слодарж. – М.:«Энергия», 1977. – 215 с. Голоднов, Ю.М. Самозапуск электродвигателей/ Ю.М. Голоднов. – М.: Энергоатомиздат, 1985. – 136 с. Лазарев Г.Б., Султанов А. Т. Требования к частотно-регулируемым приводам по условию обеспечения самозапуска./ Г. Б. Лазарев, А. Т. Султанов. - Ж. “Электроника”, №10, 2004г., с. 33-42. Забелло, Е. Применение прикладных программ в расчете режимов и устойчивости работы собственных генерирующих источников при их параллельной работе с энергосистемой/ Е. Забелло, В. Тополев // Научно-производственный журнал «Энергетика и ТЭК». – 2011 №9,10. – С. 20 – 22 Лоханин, Е.К. Моделирование синхронных машин/ Е.К. Лоханин, В.А. Глаголев, А.И. Скрыпник // Сборник докладов III международной научнопрактической конференции «Энергосистема: управление, конференция, образование». – Екатеринбург, 2008. – С. 240 – 244 Михалев, С.В. Математическая модель для оценки устойчивости синхронных электродвигателей при кратковременной потере питания/ С.В. Михалев // Современное общество, образование и наука: сборник научных трудов по материалам Международной научно-практической конференции 31 июля 2013г.: в 99 5 частях, Часть 3. – Тамбов: Изд-во ТРОО «Бизнес-Наука-Общество», 2013. – С. 99 – 103 Черных, И.В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink/ И.В. Черных. – М.: ДМК Пресс; Санкт-Петербург: Питер, 2008. – 288 с. Дьяконов, В.П. MATLAB 7.*/R2006/R2007. Самоучитель/ В.П. Дьяконов. – М.: ДМК Пресс, 2008. – 768 с. Ананичева С. С. Схемы замещения и установившиеся режимы электрических сетей: учебное пособие / С. С. Ананичева, А. Л. Мызин; 6-е изд., испр. Екатеринбург: УрФУ. 2012. 80 с. Ульянов С.А. Электромагнитные переходные процессы. Учебник для электротехнических и энергетических вузов и факультетов. - М.: «Энергия», 1970 И. А. Груздев. Идельчик В. И. И 29 Электрические системы и сети: Учебник для вузов.— М.: Энергоатомиздат, 1989, — 592 с: ил. ISBN 5-283-01012-0. Михалев С. В. Система поддержания устойчивости работы синхронных электродвигателей 6-10 кВ: дис. ... кандидата технических наук: 05.09.03: защищена 25.07.14. - Санкт-Петербург, 2014. - 121 с. Chiasson, J. Modeling and High-Perfomance Control of Electric Machines / John Chiasson. – John Wiley & Sons, Inc., New York. – 2005. – 709 p. Гамазин С.И., Старцев В.А., Цырук С.А. Переходные процессы в системах промыш- ленного электроснабжения, обусловленные электродвигательной нагрузкой. М.: Изд-во МЭИ, 1997. 424 с. Современные устройства быстродействующего АВР/ Гамазин С. И. и др. // Энергетик. 2009. №2 Матисон А. Г. Системы безударного пуска высоковольтных двигателей // Электротехнический рынок. 2008. №1(19) Абрамович, Б.Н. Возбуждение, регулирование и устойчивость синхронных двигателей/ Б.Н. Абрамович, А.А. Круглый. – Л.:Энергоатомиздат, 1983. – 70 с. Петелин, Д.П. Автоматическое регулирование возбуждения синхронных двигателей/ Д.П. Петелин. – М.,Л.:Госэнергоиздат, 1961 Русэлпром-Электромаш. Продукция [Сайт],. URL:http://www.ruselmash.ru/production/sts-stm.html (дата обращения: 31.03.2017) Гусев, А.С. Адаптируемая математическая модель систем возбуждения синхронных машин/ А.С. Гусев, С.В. Свечкарев, И.Л. Плодистый // Известия Томского политехнического университета. – 2005. – №7. – С. 211 – 215 Шабад М. А. Релейная защита и автоматика на электроподстанциях, питающих синхронные двигатели. - Л.: Энергоатомиздат, Ленинград. Отд-ние, 1984. В. И. Корогодский. Релейная защита электродвигателей напряжением выше 1000 В./В. И. Корогодский, С.Л.Кужеков, Л.Б. Паперно. – М.: Энергоатомиздат, 1981. Релейная защита электродвигателей напряжением 6 ‒10 кВ терминалами БМРЗ: методика расчета/ С.А.Гондуров, С.В. Михалев, М.Г. Пирогов, А.Л. Соловьев. ‒ СПб.: ПЭИПК, 2013, 60 с Sepam серии 80. Руководство по эксплуатации, SEPED303001RU/ Schneider Electric. – 2006. – 247 p ДИВГ.648228.023 РЭ. Блок микропроцессорный релейной защиты БМРЗ-ДС-00- 01-11. Руководство по эксплуатации/ В.Г. Езерский, М.Е. Клюкин, И.А. Карлова, Л.М. Ермоленко.– Санкт-Петербург: «НТЦ«Механотроника», 2006. – 46 с. Беркович М. А. Основы автоматики энергосистем./ М. А. Беркович, А. Н. Комаров, В.А. Семенов – 2-е изд. – М.:Энергоиздат, 1981. Шабад М. А. Расчеты релейной защиты и автоматики распределительных сетей.- 3-е изд., перераб. И доп. –Л.: Энергоатомиздат, Ленинград. отд-ние, 1985. Гамазин, С.И. Микропроцессорный быстродействующий АВР как средство повышения надежности электроснабжения ответственных потребителей/ С.И. Гамазин, А.В. Битиев, Д.Т. Гумиров, В.А. Жуков, С.А. Цырук, В.М. Пупин// Проблемы энергетики. – 2006. – №11-12. – С. 7 – 12 БАВР как средство сокращения убытков предприятий от нарушений электроснабжения в питающих сетях, Пупин В.М., Сафонов Д.О.,ТСР, Федеральный деловой журнал, 2013, №8(79). – С. 22-23; НПК «Промир» Устройства быстрого автоматического ввода резерва [Сайт],. URL: http://www.npkpromir.com/index.php/production/1-bavr/3-bavr (дата обращения: 31.03.2017) Патент на изобретение RU №2398338 от 30.04.2009 г. Способ автоматического включения резервного электропитания потребителей (варианты) и устройство для его осуществления. /Жуков В.А., Пупин В.М. //Федеральная служба по интеллектуальной собственности, патентам и товарным знакам. - Бюл. № 16 27.08.2010 Справочник по проектированию электрических сетей / Под редакцией Д. Л. Файбисовича. - М.: Изд-во НЦ ЭНАС 2006 -320 с. ил. |