Описание лабораторной работы 3
 Скачать 0.92 Mb. Скачать 0.92 Mb.
|

|
Описание лабораторной работы №3 Для получения математической модели объекта управления (ОУ), необходимо выполнить следующие шаги: - По графикам разгонных, импульсных, или иных кривых необходимо составить таблицы численных значений для входного и выходного сигнала. - Импортировать численные значения кривых в рабочее пространство (Workspace) матлаб. (значения входного сигнала произвольные) значения выходного сигнала: min значение равно №, max значение равно 3*№. - Вызвать программу идентификации IDENT. - Самостоятельно выбрать вид передаточной функции исходя из типа объекта управления (статический, астатический). - Найти параметры передаточных функций, как минимум для двух видов передаточных функций. - Из всех найденных передаточных функций выбрать функцию, с наименьшим значением среднеквадратичной ошибки. 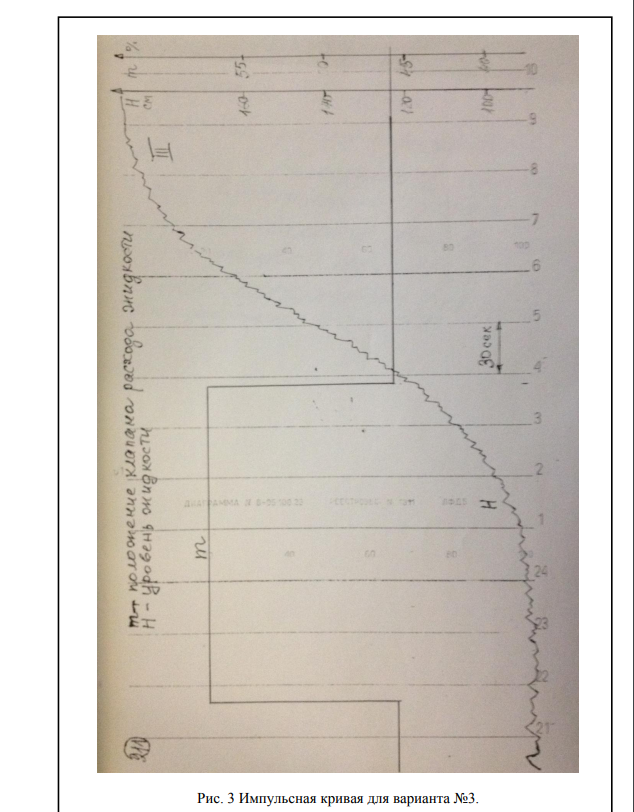 Пример расчета: Вызывается модуль IDENT и определяются параметры передаточных функций согласно методическим указаниям лабораторной работы № 3. 1) Для передаточной функций с номером 1.3 получены результаты: а) график выходного сигнала (рис 2.5); б) параметры передаточной функции (рис 2.6); г) среднеквадратичная ошибка MSE=0.07713 (рис 2.7). 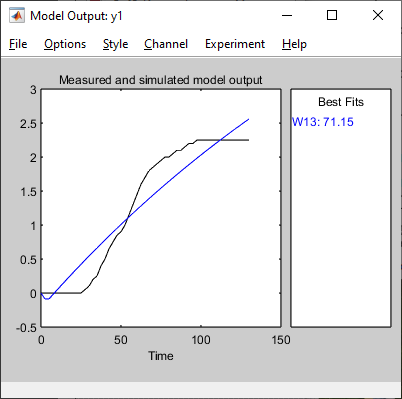 Рисунок 2.5 – График выходного сигнала  Рисунок 2.6 – Параметры передаточной функции  Рисунок 2.7 – Среднеквадратичная ошибка MSE 2) Для передаточной функций с номером 1.6 получены результаты: а) график выходного сигнала (рис 2.8); б) параметры передаточной функции (рис 2.9); в) среднеквадратичная ошибка MSE=0.01051 (рис 2.10). 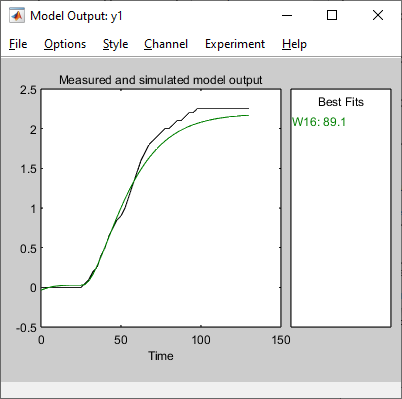 Рисунок 2.8 – График выходного сигнала 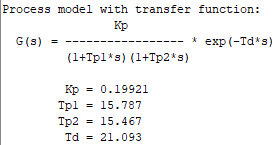 Рисунок 2.9 – Параметры передаточной функции  Рисунок 2.10 – Среднеквадратичная ошибка MSE 3) Для передаточной функций с номером 1.7 получены результаты: а) график выходного сигнала (рис 2.11); б) параметры передаточной функции (рис 2.12); в) среднеквадратичная ошибка MSE=0.05417 (рис 2.13). 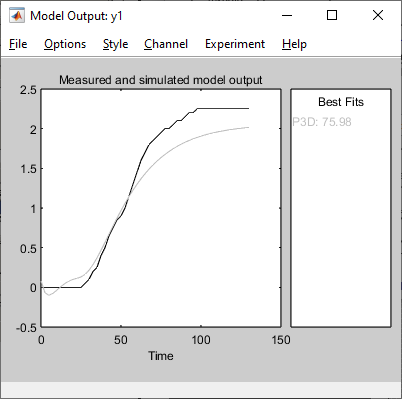 Рисунок 2.11 – График выходного сигнала 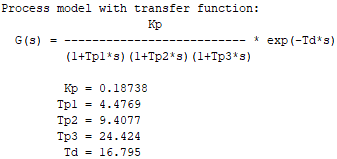 Рисунок 2.12 – Параметры передаточной функции  Рисунок 2.13 – Среднеквадратичная ошибка MSE Описание лабораторной работы №4 Задание Рассчитать новые параметры для регулятора, когда: 1) Время переходного процесса уменьшается на 10 %. 2) Перерегулирование уменьшается на 10 %. Погрешность результатов не должна быть выше 5%. 1) Собрать структурную схему для 6 варианта (таблица - исходные данные) 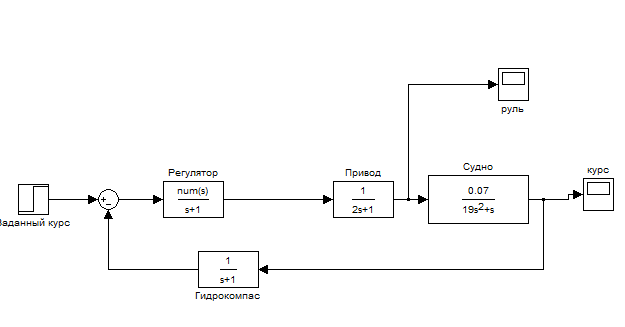 а) блок регулятор и интегратор заменить на блок «PID Controller»; б) блок привод и судно заменить на блоки с передаточной функцией, полученной в 3 лабораторной работе (идентификация); в) добавить блок Transport Delay после объекта управления; г) убрать блок руль; д) Изменить названия согласно рисунку 1 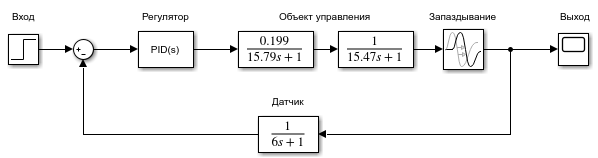 Рисунок 1 – Структурная схема2) Задать коэффициенты в регуляторе согласно значениям для 6 варианта и формулам, представленным на рисунке 2:   Рисунок 2 – Законы управления 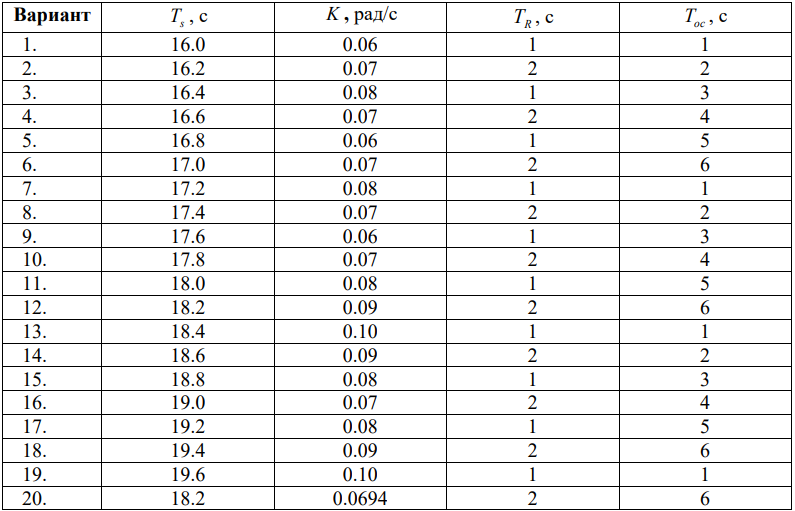 Таблица – Исходные данные Таблица – Исходные данные3) В блоке Transport Delay задать значение из 3 лабораторной. 4) Запустить моделирование. Если переходный процесс получился неустойчивый или не достиг уставки за 500 секунд, то использовать рекомендованные параметры регулятора в методе «Tune» или задать вручную. Запуск метода «Tune» представлен на рисунке 3.  5) Изменение времени переходного процесса и перерегулирования производится, как показано на рисунке 4. - Для выполнения первого пункта задания нужно использовать область 1. - Для выполнения второго пункта задания нужно использовать область 2. - Для изменения параметров регулятора нужно нажать на кнопку 3. - Для отслеживания значений времени переходного процесса и перерегулирования нужно нажать на кнопку 4. В окне (рис. 5) будут отображаться прежние и новые значения характеристик переходного процесса. 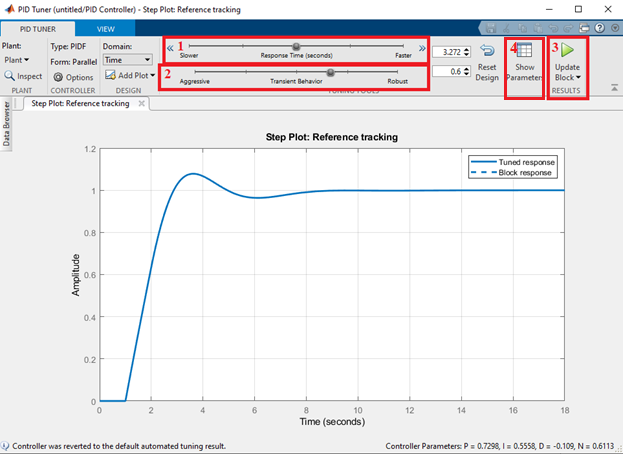 Рисунок 4 – Редактирование характеристик переходного процесса 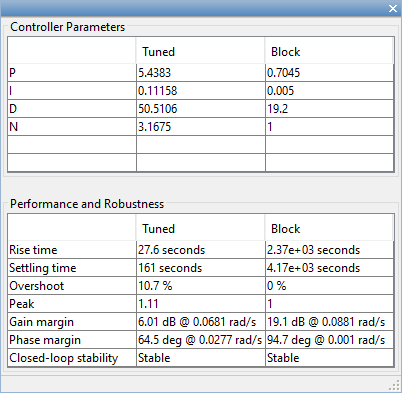 Рисунок 5 – Характеристики переходного процесса После ввода всех данных в модель запускается моделирование и оценивается результат (рис. 3.5). Так как за 500 секунд выходное значение не достигло значения уставки (уставка равна 1), то требуется изменить параметры регулятора с помощью метода «Tune» (рис. 3.6). 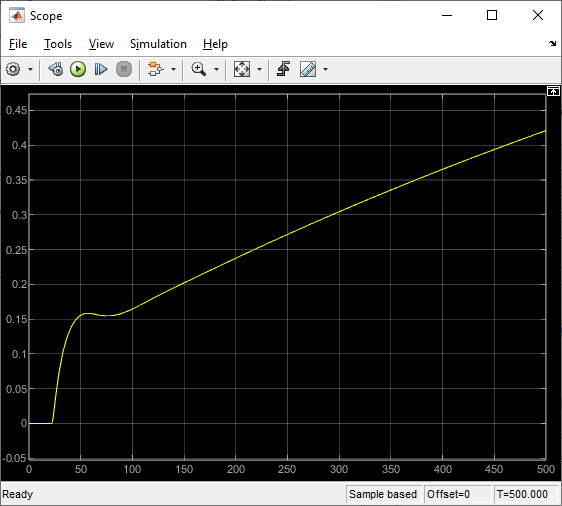 Рисунок 3.5 – Выходное значение Рисунок 3.6 – Запуск метода «Tune» После запуска метода «Tune» откроется модуль с возможностью корректировать характеристики переходного процесса (рис. 3.7). Программа автоматически предложила новые параметры регулятора, при которых время переходного процесса составляет 161 секунды, а перерегулирование равно 10,7% (рис 3.8). 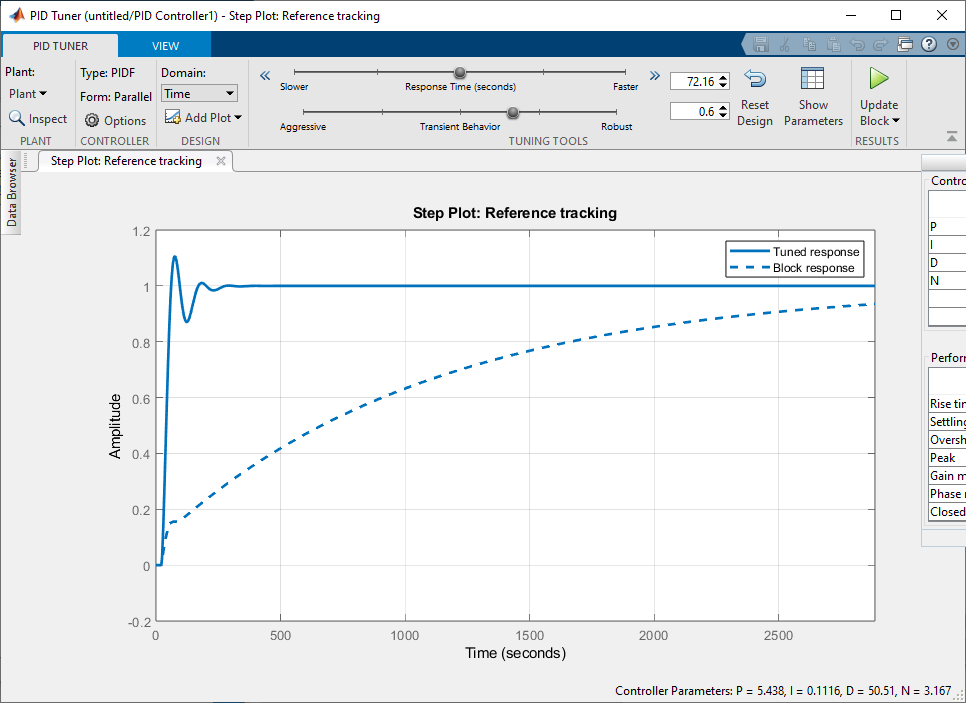 Рисунок 3.7 – Модуль «Tune» Рисунок 3.8 – Характеристики переходного процесса Произвести проверку новых параметров регулятора, запустив моделирование (рис. 3.9). 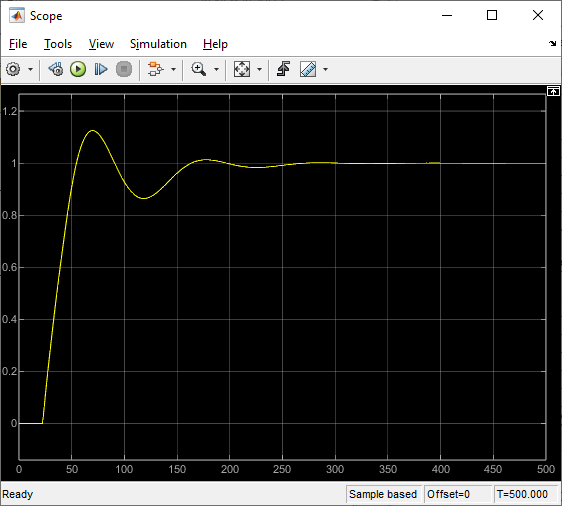 Рисунок 3.9 – Проверка параметров регулятора После изменения параметров регулятора на рекомендуемые выполнить изменение двух характеристик переходного процесса вручную: 1) Уменьшение времени переходного процесса на 10%. 2) Уменьшение перерегулирования на 10%. Так как время переходного процесса равно 161 секунду, то уменьшив на 10%, оно должно стать 144,9 секунд. Редактировать время переходного процесса и получить результаты (рис. 3.10, рис. 3.11). Время переходного процесса стало равно 145 секунд – выполнить задание удалось с погрешностью равной 0,07 % (не должно превышать 5 %). 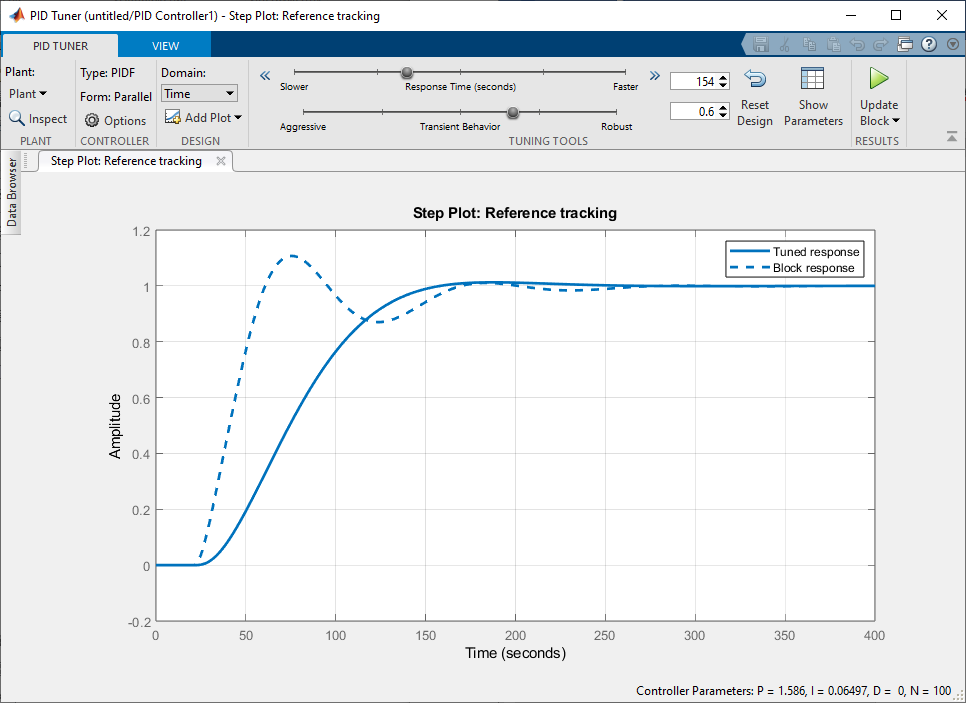 Рисунок 3.10 – Уменьщение времени переходного процесса на 10% 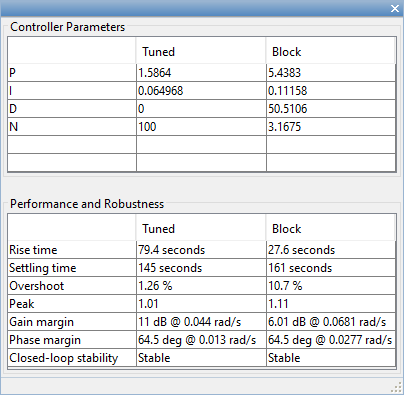 Произвести возврат параметров регулятора и уменьшить перерегулирование на 10%. Так как перерегулирование равно 10,7%, то уменьшив на 10% должно стать 9,63%. Редактировать перерегулирование и получить результаты (рис. 3.12, рис. 3.13). Перерегулирование стало равно 9,45 % – выполнить задание удалось с погрешностью равной 1,87 % (не должно превышать 5 %). 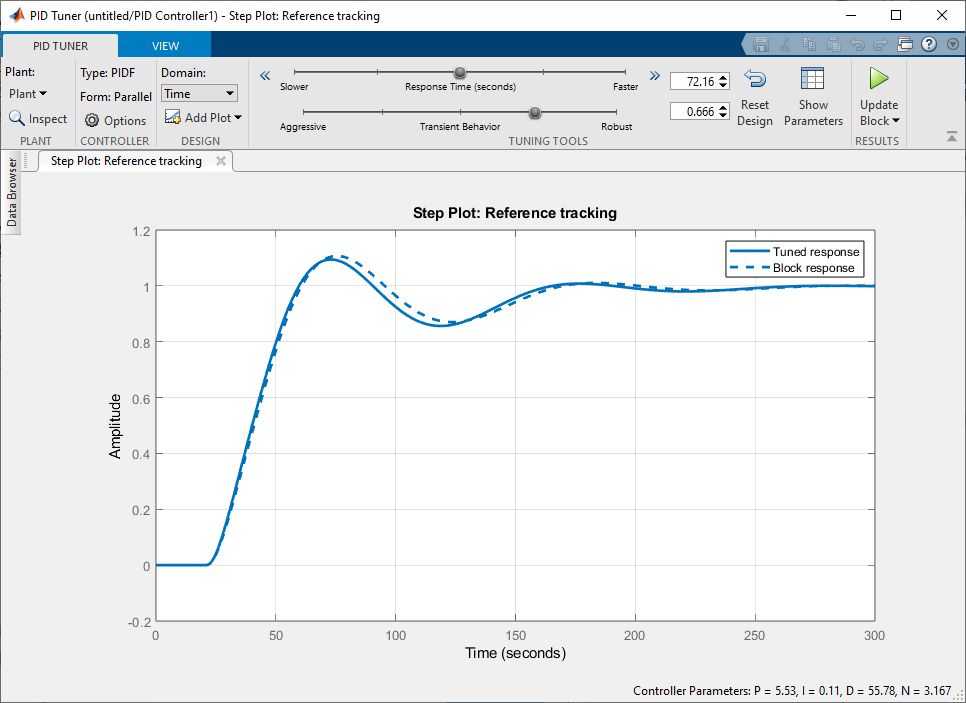 Рисунок 3.10 – Уменьщение перерегулирования на 10% 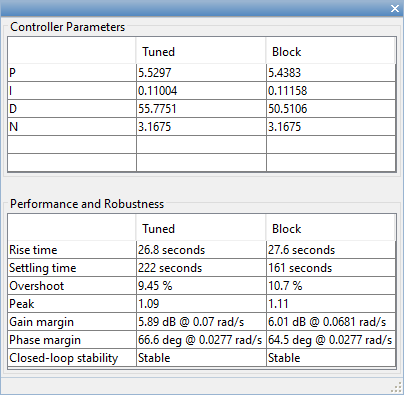 Рисунок 3.11 – Уменьщение перерегулирования на 10% |