для мобилы ответы по всему для списывания. Основы летной эксплуатации авиационного радиооборудования
 Скачать 12.7 Mb. Скачать 12.7 Mb.
|

|
Рис.35 . Структурная схема частотного РВ Принцип измерения высоты Передатчик РВ вырабатывает частотно-модулированные ВЧ колебания, которые с помощью антенны А1 излучаются к земной поверхности преимущественно в вертикальном направлении. Достигается это за счет использования ДНА факельного типа, максимум которой ориентирован по вертикали. Отраженные от земной поверхности сигналы принимаются антенной А2, которая точно такая же, как и А1. Частота излучаемых колебаний fизл периодически изменяется во времени по симметричному линейно ломаному закону (рис.36а) относительно средней частоты fср Максимальное отклонение частоты ∆f от среднего значения называется девиацией частоты. Длительность одного цикла изменения частоты, т. е. период модуляции Тм задается ГНЧ, который вырабатывает колебания низкой частоты Fм = 1/Тм.  Рис.36. Временные процессы в частотном радиовысотомере Отраженные от земной поверхности сигналы запаздывают по времени на величину th. Поскольку в процессе распространении сигналов в пространстве и их отражения частота не изменяется, закон изменения частоты отраженных сигналов fотр будет таким же, как и частоты излучаемых колебаний, но сдвинутым во времени в сторону запаздывания (вправо по временной оси) на величину th (рис.36а) Сравнение законов изменения частот fизл и fотр показывает, что в любой момент времени эти частоты отличаются на одинаковую величину F, называемую разностной частотой. Разностную частоту F можно определить путем сравнения ∆ОАВ и ∆ОА F = А1 В1 = 4Δf·tн / Tм = 8Δf·H/ с·Tм (1). Из формулы следует, что разностная частота прямо пропорциональна высоте полета (так как ∆f и Тм — постоянные величины) и, значит, путем измерения F может быть определена высота полета. Отраженные сигналы вместе с излучаемыми сигналами поступают на вход приемника, где они суммируются. В результате сложения колебаний разных частот образуются биения, которые сопровождаются амплитудной модуляцией с разностной частотой. После детектирования биений на выходе БД выделяются колебания разностной частоты. Строго говоря, разностная частота не постоянна во времени (рис.36б). В те интервалы времени, когда нарушается параллельность зависимостей fизл и f отр (t), разностная частота изменяется во времени. Суммарное время, в течение которого F зависит от времени, составляет 2 th за период модуляции Тм. Для того чтобы участки изменяющейся разностной частоты не сказывались на работе РВ, должно выполняться условие thmax < Тм, где thmax - максимальное время запаздывания на максимальной измеряемой высоте. Частота F, равная разности fизл и fотр, может быть больше или меньше нуля в зависимости от того, какая из частот fизл или fотр больше в рассматриваемый интервал времени. Физически изменение знака разностной частоты означает изменение фазы колебаний на 180° в моменты времени, когда F достигает нулевого значения. Вследствие этого колебания разностной частоты на выходе БД представляют, квазисинусоидальные колебания с периодически (2 раза за интервал Тм) изменяющейся фазой на 180 (рис.36в). Для измерения частоты таких колебаний применяются специальные способы. Колебания разностной частоты после усиления в УРЧ поступают на частотомер. В нем они с помощью УО превращаются в колебания импульсной формы (рис36г). Импульсы возникают в моменты прохождения UF через нуль в процессе увеличения напряжения. В каждом периоде UF появляется один импульс, а число импульсов за одну секунду N Методическая погрешность и минимальная измеряемая высота. Из выражения (1) можно определить высоту: Н = с Тм·F/ 8Δf = c·Tм·N1/ 8Δf = c·N/ 8Δf (2), где N = Tм ·N1 - число импульсов за период модуляции. Выражение (2) показывает, что измеряемая высота прямо пропорциональна количеству импульсов за период модуляции. При изменении высоты меняется число импульсов N. Минимальное приращение числа импульсов ∆Nmin = 1, поскольку дробной части импульса быть не может. Это значит, что минимальное изменение высоты ∆Н, которое может быть зарегистрировано РВ, составляет H=c/8Δf . Таким образом, при плавном изменении высоты, РВ должен давать дискретные значения высоты, следующие друг за другом через величину ∆Н, это приводит к появлению дополнительной погрешности измерения высоты ∆Н, которая определяется методом измерения и называется, поэтому методической. По указанной причине РВ не измеряет высоту на высотах, меньших ∆Н, т. е. пока в каждом периоде модуляции на выходе УО не сформируется хотя бы один импульс. Поэтому минимальная измеряемая высота будет равна Hmin = ΔH = c/8Δf . Как показывают формулы, методическая погрешность и минимальная измеряемая высота частотных РВ обратно пропорциональны девиации частоты и для их уменьшения девиация частоты должна повышаться. Особенности работы РВ над сложными отражающими поверхностями. Чаще всего РВ работают не над ровной, зеркально отражающей поверхностью, а над поверхностью неровной и состоящей из нескольких различных слоев. Действительно, поверхность создает зеркальное отражение в направлении нормали к ней, если высота ее неровностей не превышает 0,1 длины волны. Для РВ сантиметрового диапазона зеркально отражающей поверхностью можно считать такую поверхность, высота неровностей которой 5...7 мм. Работа РВ над многослойной отражающей поверхностью. Если РВ располагается над земной поверхностью, состоящей из нескольких слоев с различными физическими свойствами (рис.37), то измеренное значение высоты НИ может отличаться от высоты Н1 до границы раздела первых двух физических сред. Примерами таких ситуаций может быть работа РВ над водной поверхностью, льдом, снегом, над поверхностью, покрытой растительностью, и др. Работа РВ над многослойной отражающей поверхностью происходит следующим образом. Излучаемый РВ сигнал доходит до границы раздела физических сред 1 и 2 и частично отражается от нее. Отраженный от этой границы сигнал с амплитудой Em1 принимается РВ. Часть излучаемого сигнала проходит в физическую среду 2 и распространяется в ней до границы раздела сред 2 и 3. Дошедший до этой границы сигнал частично отражается от нее и 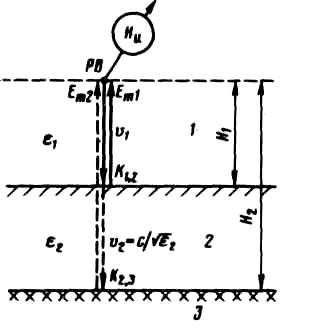 Рис.37. Работа РВ над многослойной отражающей поверхностью возвращается к РВ, имея амплитуду Еm2. Таким образом, если ограничиться рассмотрением только трех слоев, то к РВ поступают два сигнала, прошедшие в пространстве различные высоты. Поэтому измеряемая высота будет зависеть от соотношения амплитуд Еm1 и Еm2. Так если Еm1 >Еm2, то вторым отраженным сигналом можно пренебречь и РВ должен измерять высоту H1 т. е. Ни1=Н1. Если же Еm1 < Еm2, то РВ должен показывать значения Ни2 > Н2, поскольку скорость распространения радиоволны в физической среде 2 меньше, чем в вакууме. Если амплитуды Еm1 и Еm2 сравнимы, то РВ должен показывать значения, лежащие между величинами Ни1 и Ни2 . Соотношение между амплитудами Еm1 и Еm2 определяется электрическими свойствами физических сред, а именно диэлектрической проницаемостью ε и коэффициентом затухания α. Коэффициент отражения (отношение амплитуд отраженной и падающей волн) от границы раздела двух физических сред и скорость распространения радиоволны V определяются соотношениями:  ; ;(3) V Используя формулы (3), а также коэффициент затухания, можно определить соотношение амплитуд Еm 1 и Em2 и измеряемую РВ высоту. Рассмотрим несколько характерных случаев. Работа РВ над водной поверхностью. К = 0,8, так как ε1 = 1 (воздух),ε2 =80 (вода), и поэтому Em1>Em2. РВ измеряет высоту над водной поверхностью Н1,а вследствие большого коэффициента отражения обеспечивает над водной поверхностью наибольшую высотность. Работа РВ над поверхностью покрытой льдом. Здесь надо различать два случая: пресный и соленый лед. При работе над соленым льдом К1,2 ≈ 0,4, так как для соленого льда ε2≈5,3. Это значит, что большая часть сигнала проходит в лед и в нем распространяется. Соленый лед вносит очень большое затухание 100. . .150 дБ/м на частоте 10 ГГц. Если, например, принять α = 100 дБ/м, то при прохождении радиоволной каждого метра в соленом льду ее амплитуда уменьшается в 105 раз. Это значит, что отраженный от второй границы раздела сигнал будет иметь амплитуду, гораздо меньшую, чем сигнал, отраженный от поверхности льда. Следовательно, РВ будет измерять высоту до поверхности соленого льда. При работе над пресным (материковым) льдом Kl,,2 ≈ 0,28, так как для пресного льда ε = 3,2, т.е. амплитуда отраженного от пресного льда сигнала много меньше амплитуды падающей радиоволны. В отличие от соленого льда пресный не вносит большого затухания. Для него а - 0,01 дБ/м на частоте 100 МГц и а = 1,5 дБ/м на частоте 10 ГГц. По этой причине сигнал, распространяющийся в пресном льду и отраженный от нижней границы льда, может иметь амплитуду, большую или сравнимую с амплитудой сигнала, отраженного от поверхности льда. РВ в таких условиях будет измерять высоту, большую, чем до поверхности льда, и РВ пользоваться нельзя, так как он не обеспечивает безопасности полетов. Впервые на это явление обратили внимание при полетах в Антарктике. Работа РВ над поверхностью, покрытой снегом. Диэлектрическая проницаемость снега лежит между значениями е для воздуха и льда, поэтому коэффициент отражения от снега еще меньше, чем ото льда, и почти вся энергия радиоволны проходит через снег и отражается от земной поверхности. Вследствие этого РВ показывает высоту до земной поверхности. Если толщина снежного покрова значительна, то из-за затухания радиоволны в снеге может уменьшиться высотность РВ. Работа РВ над поверхностью, покрытой растительностью. Показания РВ зависят от "характера леса и времени года. Над густым лиственным лесом показания РВ соответствуют высоте над кроной деревьев. Над редким лесом РВ показывает высоту до земной поверхности. В общем случае РВ может давать показания, лежащие между значениями высоты до земной поверхности и вершин деревьев. Работа РВ над неровной и шероховатой поверхностью. При работе РВ над неровной поверхностью появляются дополнительные погрешности измерения высоты, связанные с приходом отраженных сигналов с различных направлений (а не только с направления вертикали) и проявлением эффекта Доплера. Неровная поверхность отражает сигналы во всех направлениях и поэтому вследствие конечной ширины ДНА (рис.38,а) сигналы к РВ будут поступать со всех направлений, лежащих в пределах ширины ДНА. Каждому наклонному направлению распространения радиоволн соответствует свое время запаздывания и своя разностная частота. 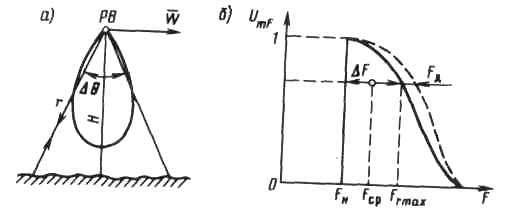 Рис. 38. Работа РВ над неровной поверхностью Это значит, что на выходе приемника выделяется сигнал биений сложной формы, в составе которого присутствуют колебания всех частот от Fн до Frmax, где Fн - разностная частота, соответствующая высоте Н; Frmax- разностная частота, соответствующая максимальному наклонному расстоянию до земной поверхности (рис. 38,б). Появление в спектре биений частот, отличных от Fn, приводит к погрешностям измерения высоты. Частотомер РВ измеряет среднюю частоту спектра биений Fcp, которая отличается от частоты FH. Смещение частоты Fcp, примерно равное 0,5 ∆F (∆F - ширина спектра биений), вызывает Дополнительную погрешность измерения высоты, которая называется погрешностью смещения. ΔH ≈ 0,5 ΔF·H / Fн Летная эксплуатация РВ малых высот Радиовысотомер РВ-5 В комплект радиовысотомера РВ-5 входят приемо-передатчик, приемная и передающая антенна рупорного типа, и указатели высоты УВ-5. Основные характеристики РВ-5 приведены в табл. Управление РВ-5 осуществляется с помощью органов управления УВ-5(Рис.39.) 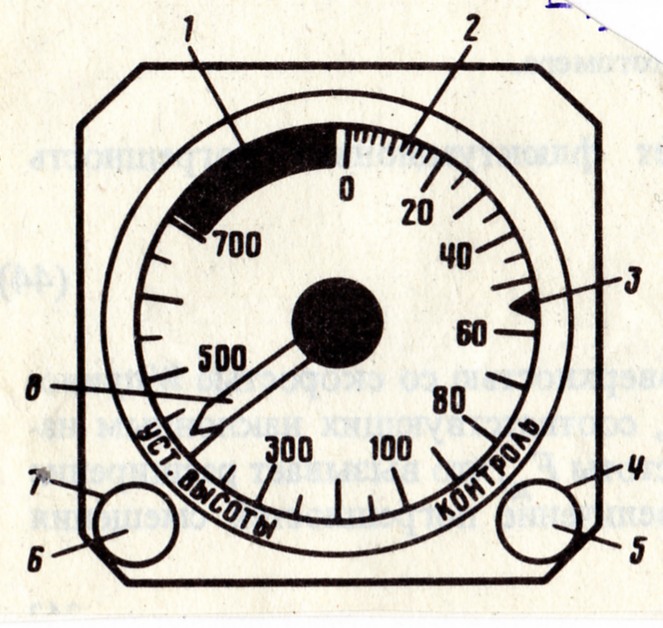 Рис.39. Указатель УВ - 5 1 — затемненный сектор; 2 — шкала высоты; 3 — индекс установки высоты; 4 — кнопка "Контроль"; 5 — лампа сигнализации отказа РВ; б — лампа сигнализации достижения установленной высоты; 7 — ручка установки высоты; 8 — стрелочный указатель высоты Перед полетом и в полете РВ необходимо включать не позже, чем за 10. . .15 мин до начала его использования. В полете исправность РВ контролируют по лампе сигнализации отказа с красным светофильтром на УВ-5 и по показаниям высоты указателем. Если лампа отказа РВ горит, то РВ неисправен. Стрелка указателя устанавливается в затемненный сектор и РВ использовать нельзя. РВ следует также считать неисправным, когда показания УВ-5 явно не соответствуют действительному значению истинной высоты. Если возникли сомнения в исправности РВ, то его работоспособность можно проверить путем нажатия кнопки "Контроль". При нажатии этой кнопки и исправном РВ стрелка указателя высоты перемещается от измеряемой высоты до отметки 15м. При отпускании этой кнопки стрелка перемещается на значение истинной высоты полета. Указатель заданной (опасной) высоты, о достижении которой требуется получить информацию, можно установить на нужное значение, как перед полетом, так и в полете. При снижении в момент достижения установленной высоты срабатывает звуковая сигнализация (в течение 3. . .9 с) и загорается сигнальная лампа 5 с желтым светофильтром. При наборе высоты в момент достижения установленной высоты сигнальная лампа 5 гаснет, звуковая сигнализация не срабатывает. При выходе из строя сигнальных ламп об исправности РВ судят по показаниям УВ-5, а о достижении установленной высоты - по срабатыванию, звуковой сигнализации. Радиовысотомер РВ – 85 На воздушных судах, оснащаемых комплексной системой пилотажно-навигационного оборудования (КСПНО), представляющей НПК последнего поколения, устанавливается два комплекта РВ-85, предназначенных для измерения истинной высоты полета в диапазоне высот от 0 до 1500м. Радиовысотомер обеспечивает: выдачу информации о высоте полета в систему электронной индикации (СЭИ), в вычислительную систему управление полетом (ВСУПТ) и системы предупреждение критических режимов (СПКР) и приближения земли (СППЗ). Он также обеспечивает выдачу на экраны комбинированных пилотажных индикаторов (КПИ) в момент пролета заданной высоты индекса ВПР и звуковой сигнализации в систему СПГС. Индикация текущего значения высоты производится на КПИ (рис.40,а) высота принятия решения (ВПР) индицируется также на КПИ и устанавливается с помощью пульта управления системы электронной индикации (ПУ СЭИ рис.40,б). Установка значения ВПР на ПУ СЭИ осуществляется переключателем режимов 2 в положение “ВПР”. Набор численного значения ВПР производится кнопками 3 ввода ВПР на ПУ СЭИ, контролируется на счетчике 4 ВПР там же. Для ввода ВПР в РВ-85 нажимается кнопка 1 “ВВОД” на ПУ. 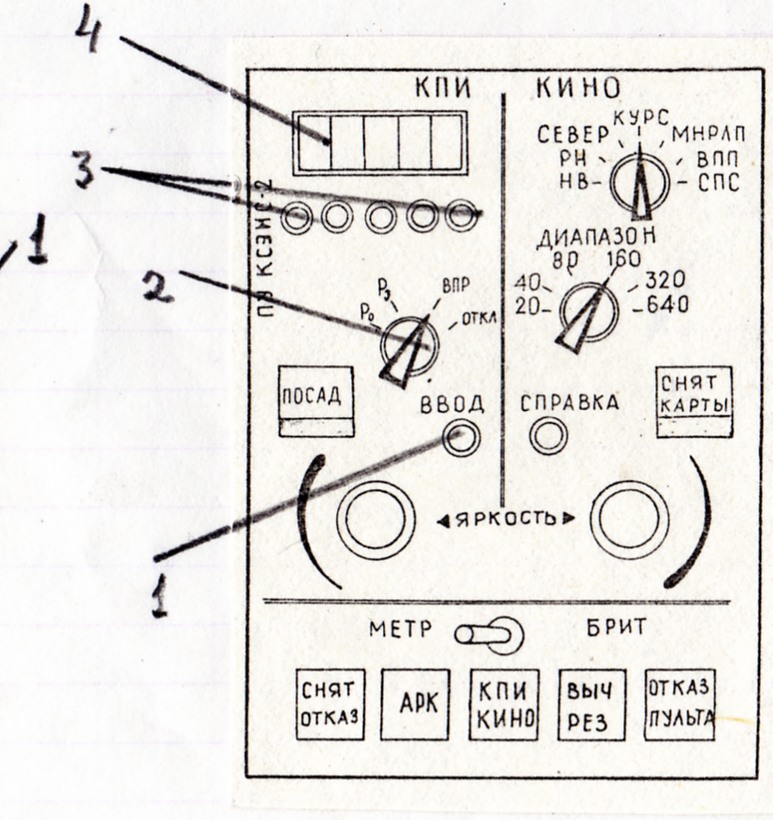 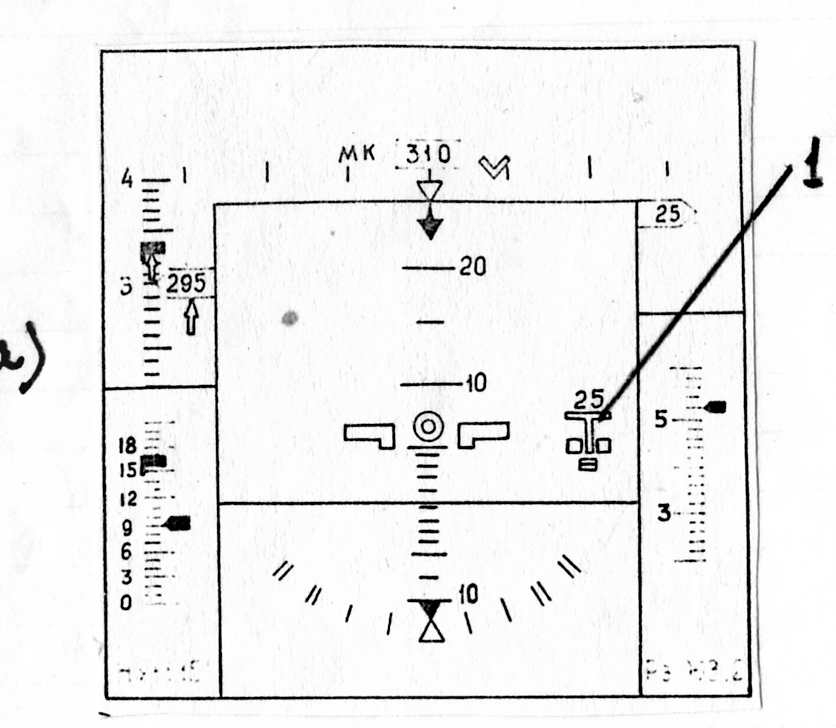 Рис.40. Индикатор КПИ (а) и ПУ СЭИ (б) Проверка работоспособности РВ-85. Для проверки работоспособности РВ-85 необходимо: - на ПУ КСЭИС (рис.40,б) переключатель режимов (2) установить в положение “ВПР”; - кнопками набора ВПР (3) набрать значение 10м; - убедиться, что на счетчике (4) индицируется ВПР, равная 10м, и нажать кнопку “Ввод” (1); - на ПУИ – 85 включить режим контроля РВ1 (РВ2) и убедиться, что на КПИ (рис.40,а) индицируется контрольное значение высоты 17± 1,5м; - по окончании режим “Контроль” и возвращение индицируемых значении высоты к нулю в момент прохода значения ВПР, равного 10м, на КПИ (рис.40,а) появиться символ “□ □” ВПР и в телефонах прослушивается тональный сигнал. В полете В соответствии с требуемыми условиями полета ввести требуемые значения ВПР. Оно индицируется на КПИ (рис.40,а) цифрами и индексом 1 желтого цвета, если Н рв < 150м. При отпускании кнопки “ВВОД” на ПУ СЭИ цифры ВПР на КПИ гаснут. При 150 < Н рв < 1500м индицируется только цифровое значение ВПР (если нажата кнопка “ВВОД” на ПУ СЭИ). При автоматическом и директором управлении полетом ВПР меняется автоматически только в сторону увеличения, по сигналам вычислительной системы управления полетом (ВС УПТ), в зависимости от категории посадки. Бортовые радиолокационные станции На ВС гражданской авиации для наблюдения за земной поверхностью и различными препятствиями широко применяются бортовые радиолокаторы (БРЛ). БРЛ - автономные средства, для их работы не требуется наземного оборудования. БРЛ, предназначенные для наблюдения за земной поверхностью, получили название РЛ обзора земной поверхности, или навигационных РЛ. Они создают на экране индикатора в некотором масштабе радиолокационное изображение (карту) пролетаемой местности. Радиолокационная карта местности позволяет ориентироваться в сложных метеорологических условиях и ночью. Для ориентировки с помощью БРЛ необходимо, чтобы на пролетаемой местности были хорошо опознаваемые радиолокационные ориентиры. БРЛ, предназначенные для обнаружения атмосферных образований и оценки степени их опасности, называются метеорологическими. Большинство БРЛ совмещают функции метеорологического и навигационного радиолокаторов, их называют метеонавигационными радиолокаторами (МНРЛ). Используя радиолокационные изображения местности и гидрометеообразований, можно решать следующие навигационные задачи: — вести ориентировку на местности, наблюдая за радиолокационными ориентирами; — определять место ВС и производить контроль пути; — находить дальность и курсовой угол ориентиров (КУО); ― определять путевую скорость, угол сноса и высоту полета; ― предупреждать столкновение с ВС и другими препятствиями; — обнаруживать грозовые очаги и осуществлять их обход; — выводить ВС в заданный район или на аэродром посадки, БРЛ и качество их работы тесно связаны с безопасностью полетов. Объясняется это тем, что БРЛ являются единственным источником информации о зонах грозовой деятельности и мощной кучевой облачности, в которых велика вероятность сильной турбулентности атмосферы. Поэтому отказы БРЛ или их неправильное применение могут привести к опасной ситуации и развитию авиационного происшествия. Принцип работы и структурная схема. В общих чертах принцип работы БРЛ ничем не отличается от принципа действия любого РЛ импульсного типа. БРЛ излучает в пространство мощные высокочастотные импульсы, называемые зондирующими. Они достигают различных участков земной поверхности и других объектов и отражаются ими. Отраженные сигналы возвращаются к БРЛ, принимаются им, усиливаются, и после преобразования поступают на электронно-лучевой индикатор. Принятые БРЛ сигналы создают на экране электронно-лучевого индикатора (ЭЛИ) яркостью засветки, по которым определяются координаты отражающих объектов. Наклонное расстояние до объекта r определяется по времени запаздывания отраженных сигналов, которое вследствие постоянства скорости распространения радиоволны прямо пропорционально r. Угловая координата объекта в горизонтальной плоскости — КУО определяется по углу поворота антенны относительно продольной оси ВС в момент поступления отраженных сигналов. Объясняется это тем, что вследствие использования направленной в горизонтальной плоскости антенны, отраженные объектом сигналы будут приниматься БРЛ только тогда, когда антенный луч направлен на этот объект. 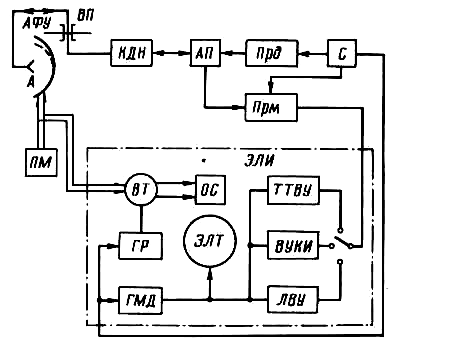 Рис. 51. Структурная схема БРЛ Яркость засветок на экране ЭЛИ определяется интенсивностью отраженных сигналов. Различные участки земли и другие отражающие объекты имеют разную отражаемость и отображаются, поэтому на экране индикатора засветками разной яркости. Совокупность засветок разной яркости образует на экране ЭЛИ разноконтрастное яркостное изображение пролетаемой местности (радиолокационную карту). Вид радиолокационной карты местности определяется структурой и характером земной поверхности. Радиолокационное изображение на экране индикатора не всегда точно совпадает с фактической картой местности. Искажения объясняются двумя причинами: измерением наклонных, а не горизонтальных расстояний и влиянием кривизны земной поверхности. Первая причина приводит к искажениям, возрастающим при увеличении угла в вертикальной плоскости, под которым наблюдается объект. Искажения удаленных участков земной поверхности практически отсутствуют. Вторая причина приводит к искажениям только на больших дальностях при полете на больших высотах. В состав БРЛ (рис. 51) входят следующие основные устройства: антенно-фидерное устройство АФУ, передатчик Прд, приемник Прм, синхронизатор и ЭЛИ. Синхронизатор вырабатывает периодическую последовательность импульсов, которые поступают на Прд и ЭЛИ. Он задает моменты излучения зондирующих импульсов и согласует во времени работу различных устройств станции. Прд служит для формирования зондирующих импульсов, Прм — для усиления отраженных сигналов, ЭЛИ — для отображения радиолокационной информации. Бортовая аппаратура БСПС TCAS II В состав процедурыTCAS II входят: - два приемопередатчика, являющиеся одновременно ответчиками адресной системы вторичной радиолокации; - компьютерный вычислитель БСПС, выполняющий все функции по управлению работой аппаратуры, а именно: 1- формирование импульсов, инициирующих работу приемопередатчиков; 2- регистрацию и анализ принимаемых сигналов; 3- комплексную обработку всей информации; 4- координацию обмена информацией между БСПС собственного ВС и ВС – нарушителя; 5- формирование данных, для отображения информации на VIS КВС и 2-го пилота; В состав БСПС входят также пульт управления и блок направленных антенн (верхняя и нижняя), которые дополняют систему ненаправленных антенны ответчиков ВРЛ В качестве датчиков информации для БСПС используются: - системы воздушных сигналов (СВС), представляющая данные о барометрической высоте полета; - радиовысотомеры, для определения истинной высоты полета; - система предупреждения столкновения с землей (GPWS), обеспечивающая выключение БСПС на низких высотах. В свою очередь, информация от БСПС фиксируется системой регистрации полетных данных и выдается на синтезатор речевых команд для воспроизведения их через систему громкоговорящей связи (СГС). Режимы работы и отображение информации. Вся информация отображается на дисплеях VIS (рис.68) . Масштаб дисплея – 6,5 м. мили(11,7км) по направлению полета и 2,5 м мили(4,5км) в противоположном направлении, может изменяться кнопкой “R” на лицевой части VIS. Отбор отображаемых данных зависит от режима работы БСПС. Установка режима осуществляется переключателем (1) на ПУ БСПС рис.72. Предусматривается четыре режима работы БСПС: 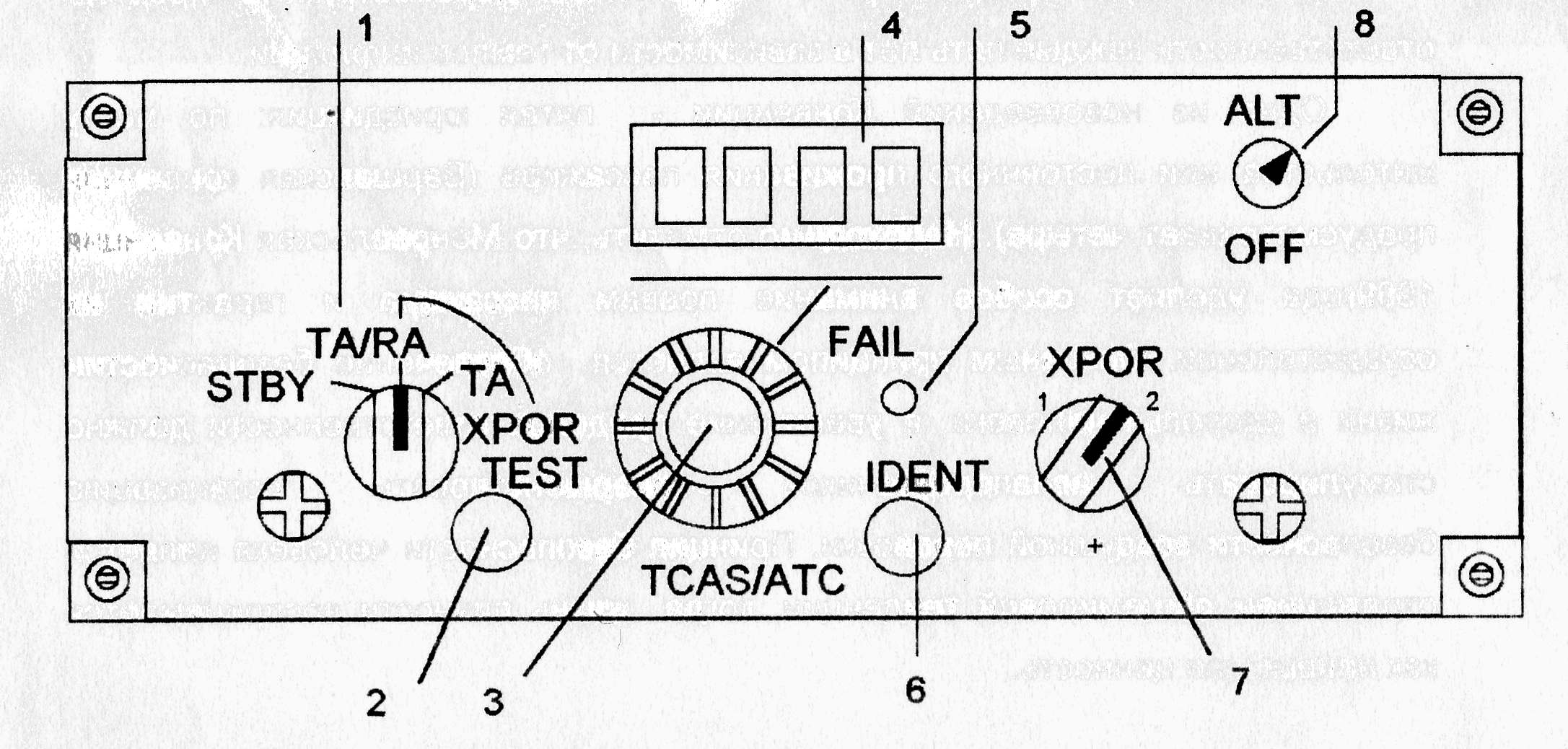 Рис.72. Пульт управления БСПС 1.Резервный режим – STBY(Stungby). В этом режиме ни одна из функций БСПС не выполняется, функционирует только VIS как указатель вертикальной скорости ВС. На дисплее VIS горит надпись TCAS OFF(белого цвета рис.73). 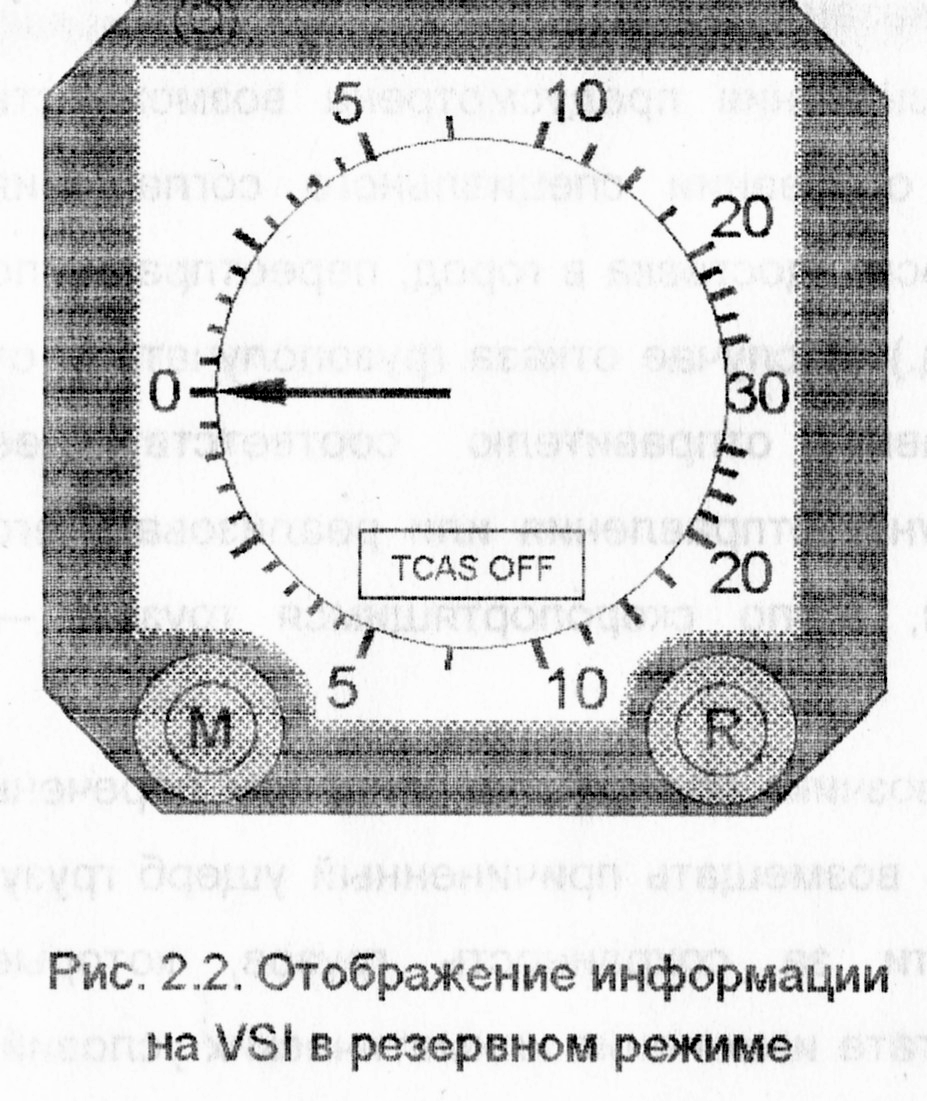 Рис. 72. Информация на VIS в резервном режиме 2. Режим отображения воздушной обстановки ТА(рис.68). На дисплеях VIS отображаются отметки от всех ВС - нарушителей. Символы отметок характеризуют степень угрозы, создаваемой ВС - нарушителями. У отметок представляются числа в сотнях футов, указывающие высоту ВС - нарушителей относительно собственного ВС, а стрелки показывают направление движения в вертикальной плоскости. В этом режиме БСПС не формирует и не отображает рекомендаций по разрешению конфликта. 3. Режим отображения воздушной обстановки и выдачи информации орекомендуемом маневре по ликвидации конфликта (TA/RA). Выполняются все функции БСПС. Как и в режиме ТА на VIS отображаются отметки всех ВС - нарушителей. Цветные дуги зеленого и красного цветов по периферии экрана VIS указывают разрешенные, т.е. рекомендуемые и запрещенные значения вертикальной скорости движения собственного ВС рис.70 и 71. Помимо отметок ВС - нарушителей на дисплее отображаются команды диспетчеров службы ОВД, адресованные экипажу собственного ВС. 4. Режим проверки работоспособности БСПС и ее элементов- TEST (рис.73,74,75) включается кнопкой 2 на ПУ. Проверки осуществляются в течении 12с., при этом на экранах VIS высвечивается надпись TEST. Вначале на экране отображаются отметки 4-х ВС - нарушителей (рис.73). Далее отображаются номера проверенных частей программного продукта (рис.74), затем результаты тестирования всех компонентов БСПС (рис.75). Напротив названия тестируемого элемента отображается результат ОК (исправен) или FAIL (неисправен). В заключение проверки выдается речевое сообщение “TCAS SYSTEM TEST OK” либо ”TCAS SYSTEM TEST FAIL” Зеленый сектор Красный сектор 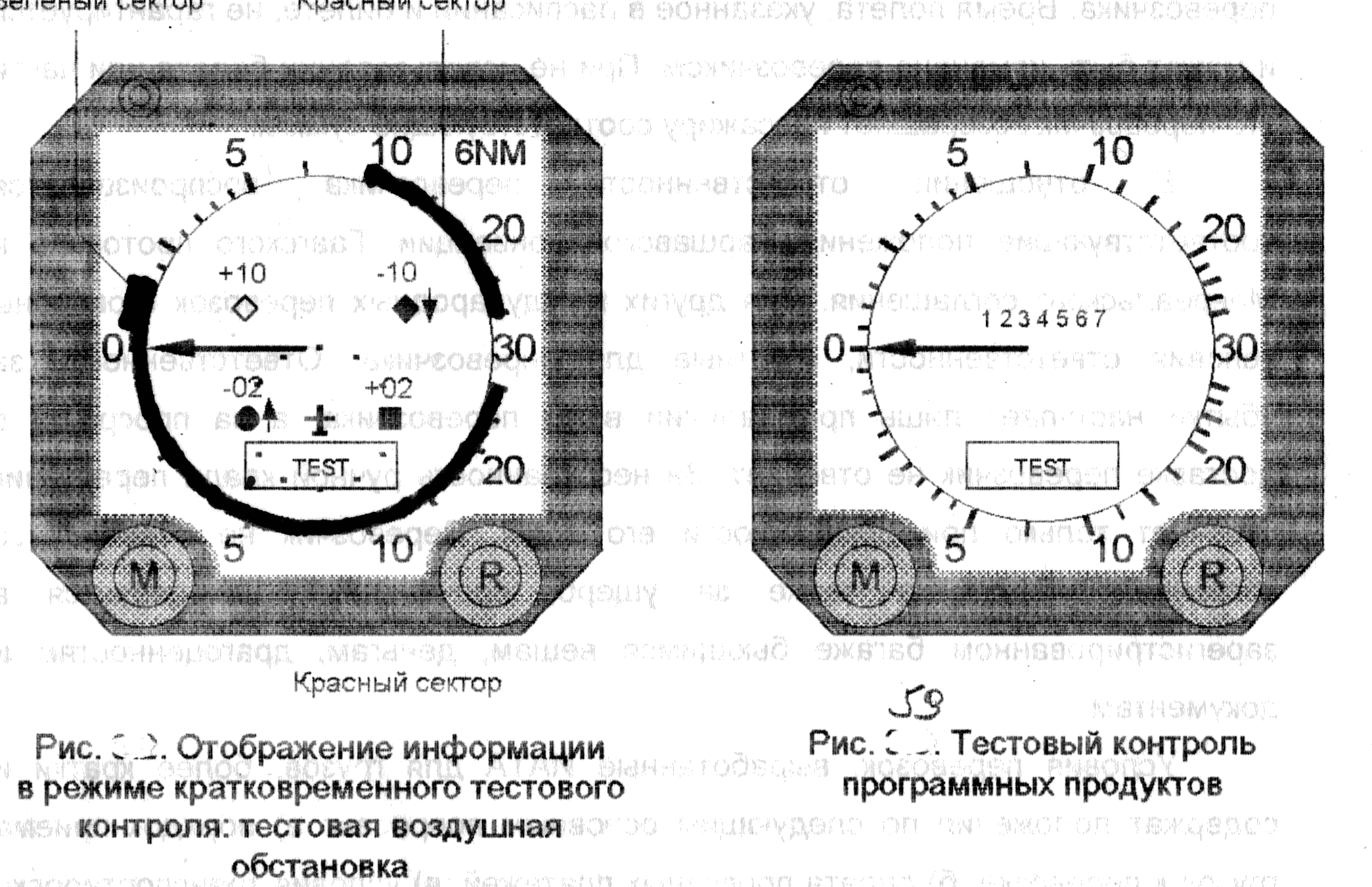 Рис. 73 Отображение информации в режиме Рис.74 Тестовый контроль тест-контроля воздушной обстановки программных продуктов. 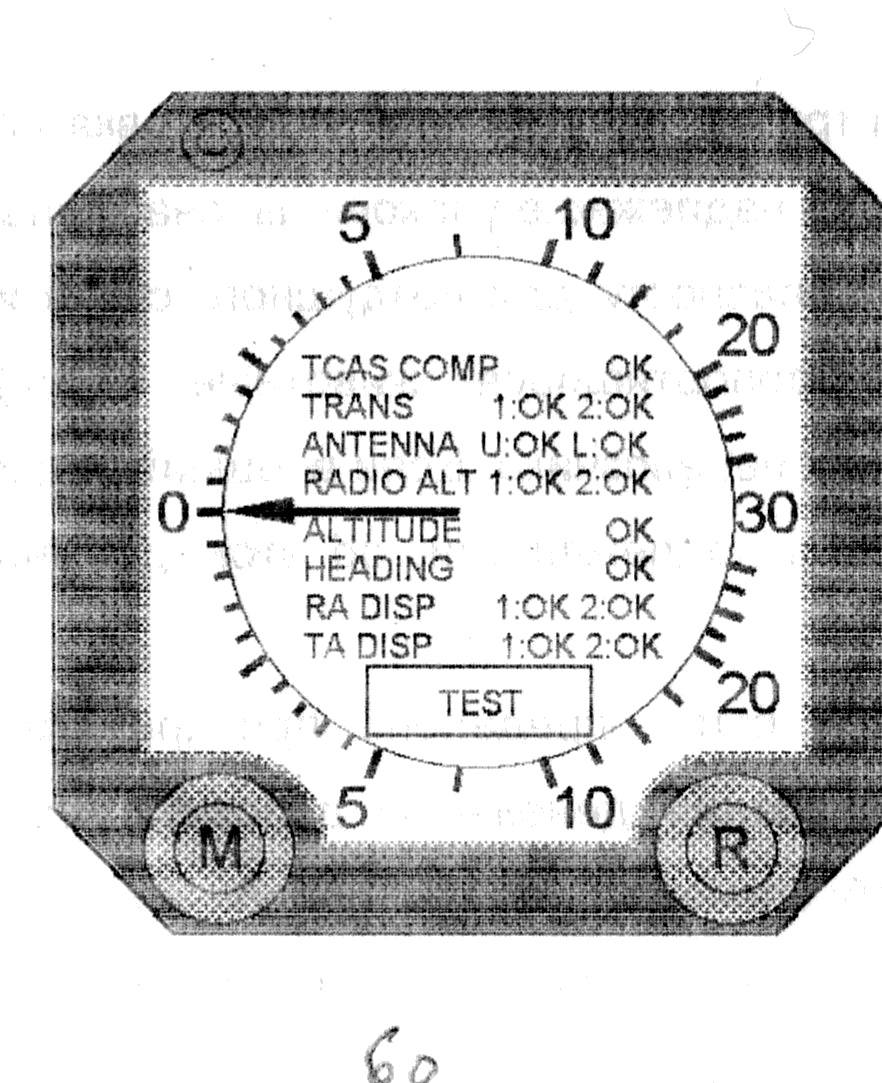 Рис. 75. Результаты тестовой проверки Кнопкой “R”- изменяется масштаб дальности на VIS (6 м. миль- вперед, 3м.мили назад). 5. Режим XPOR- используется в случае отказа режимов “TA/RA” и “TA” при полетах в регионах, в которых служба ОВД осуществляет контроль в режиме “RBS”. Назначение остальных органов на ПУ следующее: 3 и 4 – рукоятка набора “TCAS/ATC” и табло отображения, когда ответчика УВД. – лампа “FAIL” сигнализации отказа ответчики или барометрического высотомера. 6 – кнопка “IDENT” включения сигнала опознавание. Сигнал включается по требованию службы УВД. 7- Переключатель “XPOR” выбора комплекта ответчика 8 – Выключатель “ALT-OFF” датчика барометрической высоты. Кроме этого для управления процессом отображения используется две кнопки на лицевой панели VIS” -кнопкой “M” включается или выключается режим отображения воздушной обстановки на VIS: - кнопкой “R” - изменяется масштаб дальности на VIS (6м.миль - вперед, 3 м.мили - назад, или 12м. миль - вперед, 6м.миль.- назад.) Бортовая радиолокационная станция (БРЛС) является автономным радиотехническим средством, позволяющим наблюдать радиолокационное изображение пролетаемой местности и окружающей воздушной обстановки, а так же измерять курсовые углы, и наклонные дальности до ориентиров. БРЛС может использоваться не только для решения навигационных задач, но и для предотвращения попадания в зоны опасных метеоявлений. В середине ХХ века бортовой радиолокатор был одним из основных средств навигации, но в настоящее время из-за невысокой точности он уступил свое место более точным радионавигационным средствам. Но как средство предотвращения попадания в зоны грозовой деятельности сохранил свое значение. Поэтому на современных ВС БРЛС чаще называют метеонавигационными РЛС (МНРЛС). Некоторые типы БРЛС давали также возможность предотвращения опасных сближений с другими ВС. В данной части учебного пособия будет рассмотрено применение БРЛС для навигации. Ее использование для обхода зон грозовой деятельности будет рассмотрено в другой части, в теме, посвященной обеспечению безопасности полетов. БРЛС является автономным средством, а не системой, поэтому ее нельзя, разумеется, отнести к классу угломерных, дальномерных или иных систем. Но с ее помощью место самолета можно определить как угломерным, так и дальномерным или угломерно-дальномерным способом. При этом можно определить пеленги и дальности одновременно нескольких ориентиров. Принцип работы бортовой РЛС такой же, как и у наземных РЛС. Он заключается в излучении бортовой антенной электромагнитных импульсов, их отражении от объектов, и приёме отражённых сигналов бортовой антенной. Упрощенная блок-схема БРЛС представлена на рис. 9.1. 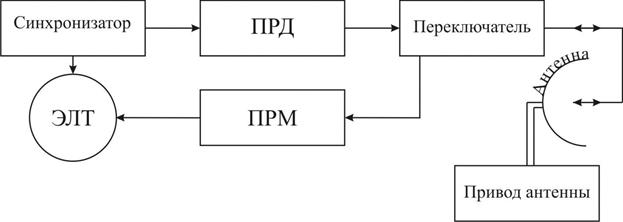 Рис. 9.1. Упрощенная схема БРЛС Синхронизатор вырабатывает периодическую последовательность запускающих импульсов, которые поступают на передатчик (ПРД) и ЭЛТ. Под их воздействием передатчик генерирует и излучает через антенну мощные импульсы в сантиметровом диапазоне волн. Одновременно начинается развёртка на ЭЛТ, то есть «линия прицеливания» электронной пушки начинает отклоняться от центра экрана. Отражённый от объекта импульс принимается через антенну и приёмник (ПРМ), и подаётся на ЭЛТ. В этот момент пушка излучает электроны, образуя пятно на экране трубки. Расстояние отметки объекта от начала развёртки пропорционально времени прохождения сигнала и, следовательно, удалению до объекта. С помощью привода (электродвигателя) антенна сканирует (вращается), излучая импульсы по различным направлениям. В результате послесвечения экрана отметки объектов по всем направлениям сливаются в единое изображение. На экране электронным путём формируются метки дальности, с помощью которых можно определить расстояние до объекта. Одна и та же антенна предназначена как для излучения, так и для приема сигналов. Чтобы мощный излучаемый сигнал не попал в приемник, антенный переключатель отключает приемник от антенны в момент излучения импульса. Использовались БРЛС как переднего обзора, в которых антенна располагается в носовой части ВС и сканирует вправо-влево в определенном секторе, так и БРЛС кругового обзора, в которых антенна вращается на 360°. В этом случае антенна располагается под фюзеляжем. Бортовые РЛС применяются в авиации с 50-ых годов и, конечно, за прошедшие десятилетия было создано много их разновидностей. В гражданской авиации применялись такие БРЛС как РОЗ-1, РПСН-2 и другие. Наиболее распространены были радиолокаторы серии «Гроза», которые в принципе имели одинаковое устройство и похожие органы управления, но несколько различались в зависимости от того, для какого типа ВС были предназначены. Соответственно, на Ту-154 устанавливалась «Гроза-154», на Ан-26 «Гроза-26» и т.д. Органы управления и режимы работы БРЛС «Гроза» Органы управления. Общий вид органов управления и индикации бортовой РЛС «Гроза», применяемой на самолете Ан-26, показан на рис. 9.2. Посередине в верхней части располагается экран ЭЛТ, в нижней части которого находится точка начала развертки. Вертикальная линия идущая вверх от начала развертки называется курсовой чертой, поскольку направлена по продольной оси ВС. Антенна в таких БРЛС сканирует в секторе ±100° от продольной оси ВС (курсовой черты). Слева от экрана находятся две клавиши управления антенной. С их помощью можно антенну, если она не сканирует, и соответствующую ее направлению линию развертки направить в любую сторону. Справа от экрана находится клавиша включения БРЛС. Справа внизу располагается переключатель масштабов изображения. Здесь под масштабом понимается вовсе не то, что в картографии. Масштаб изображения – это дальность до максимально удаленного объекта, который можно видеть на экране (например, от начала развертки до самой верхней точки экрана). Пилот может установить любой из имеющихся масштабов. На каждом из них будут формироваться свои метки дальности (окружности одинакового удаления от ВС), но интервал между метками на каждом масштабе свой. Масштабы и интервалы между метками приведены в табл. 9.1. Интервал между метками для каждого масштаба своей БРЛС пилот должен знать наизусть, поскольку численные значения на экране, конечно, не надписаны. 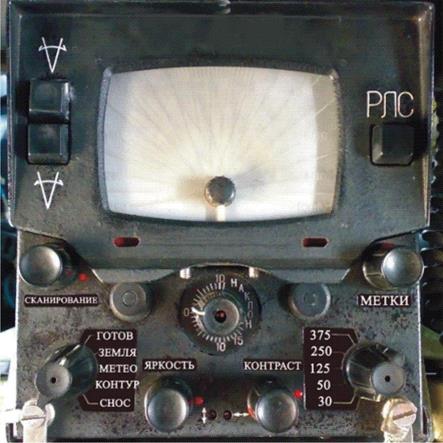 Рис.9.2 . Органы управления и индикации БРЛС «Гроза-26». Слева внизу – переключатель режимов работы БРЛС, о которых речь будет идти далее. Посередине прямо под экраном располагается кремальера изменения угла наклона антенны относительно горизонтальной плоскости. Антенну (и, соответственно, направление ее излучения) можно установить так, чтобы она сканировала строго в горизонтальной плоскости (вправо-влево) или наклонить плоскость ее сканирования на несколько градусов вверх или вниз. Нужно помнить, что нулевое положение антенны соответствует истинной горизонтальной плоскости, а не горизонтальной плоскости самолета. Если самолет летит с тангажом или креном, антенна не наклонится вместе с ним, а останется горизонтальной относительно земли. Для этого в БРЛС подаются сигналы от соответствующего внешнего устройства (например, от центральной гировертикали). Масштабы и интервалы между метками Таблица 9.1
Имеются также кремальеры регулировки качества изображения на экране, аналогичные тем, что используются в телевизоре (яркость, контрастность,. частота и пр.), а также кремальера регулировки яркости меток дальности, с помощью которой эти метки можно сделать ярче или, наоборот, вообще убрать с экрана. Режимы работы. БРЛС «Гроза», как правило, имеет следующие режимы работы. Режим «Готов». В этом режиме излучение не происходит, но БРЛС готова к работе, все электрические цепи под напряжением. Режим «Земля». Это основной режим работы для навигации. Антенна наклонена к земле, и на экране можно видеть изображение земной поверхности. Излучение может осуществляться по широкой, или узкой диаграмме направленности. Широкая диаграмма направленности (рис. 9.3), называемая также «косеканс-квадрат» (из-за формулы, ее описывающей), охватывает значительный диапазон дальностей на земной поверхности по направлению ее излучения. Мощность отраженного сигнала от близких и удаленных объектов примерно одинакова. Узкая диаграмма имеет форму луча шириной примерно 3° .Излучаемая мощность по обеим диаграммам одинакова, но в широкой диаграмме она «размазана» по большой площади, а при использовании узкой диаграммы – сконцентрирована по одному направлению. Это дает возможность лучше наблюдать удаленные объекты. Но то, что не попадет в пределы луча, видно не будет. На масштабах 30, 50, и 125, используется широкая диаграмма направленности, на масштабе 375 узкая, а на масштабе 200 поочерёдно, узкая и широкая. 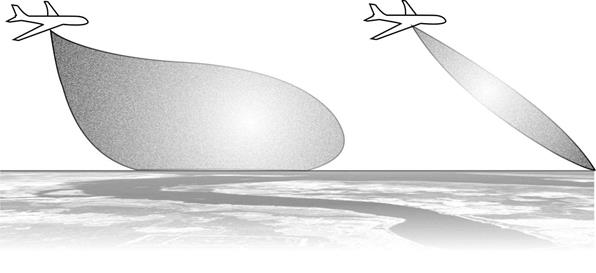 Рис. 9.3. Широкая и узкая диаграммы направленности Как уже отмечалось, удаление отметки объекта на экране от начала развертки соответствует наклонной дальности объекта. Первое, от чего отразится излучаемый электромагнитный импульс – это точка на земной поверхности под ВС. Наклонная дальность от этой точки равна истинной высоте полета, поэтому изображение этой точки появится на соответствующем удалении от начала развертки, то есть не в центре экрана, а на расстоянии, соответствующем высоте. Но антенна сканирует, поэтому изображение этой одной и той же точки появится по всем направлениям излучения. Таким образом, место самолета, которое является точкой, изобразится на экране в виде окружности с радиусом, равным высоте полета! Внутри этой окружности экран будет темным (нет отражающих объектов). В принципе по радиусу высотного кольца можно судить о высоте полета, но точность будет очень низка (порядка 1 км). Из этого ясно, что на экране БРЛС изображение земной поверхности искажено по сравнению с тем, как оно выглядит на карте. Ведь точка превратилась в линию – окружность. Разумеется, будет искажена форма и других объектов поблизости от ВС. Но на больших удалениях, где наклонная дальность практически совпадает с горизонтальной, искажения будут все меньше и меньше (рис. 9.4). На масштабе 375 км введена задержка развёртки, соответствующая дальности 200 км. Это означает, что в момент излучения импульса развертка сразу не начинается, а начнется лишь в момент, когда пройдет время, соответствующее дальности 200 км. Объект, находящийся на этом удалении, изобразится в центре экрана (в начале развертки). Причем все объекты на этом удалении, находящиеся в разные стороны от ВС, изобразятся в этой же точке. Здесь уже окружность с радиусом 200 км стянется в одну точку. Понятно, что и в этом случае будут искажения формы объектов. Задержка введена для того, чтобы лучше рассмотреть именно удаленные объекты, пусть даже с искажениями. На экране на масштабе 375 км будут видны только объекты, находящиеся на удалениях от 200 до 375 км. Режим «Метео». Предназначен для обнаружения зон грозовой деятельности. Используется узкая диаграмма направленности, и устанавливается наклон антенны равный нулю. Антенна сканирует в горизонтальной плоскости на уровне высоты полета и луч пересекает очаги грозовой деятельности (рис. 9.5). Они сильно электризованы, хорошо отражают радиоволны и видны в виде ярких засветок. Чем ярче засветка, тем сильнее гроза (рис. 9.6). 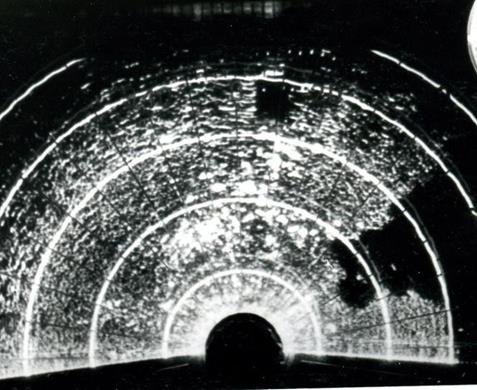 Рис. 9.4. Вид радиолокационного изображения земной поверхности 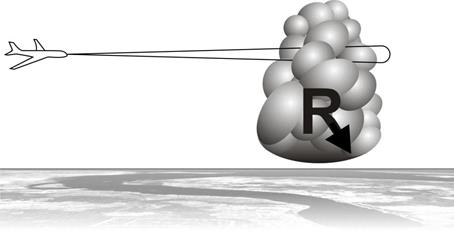 Рис. 9.5. Диаграмма направленности а режиме «Метео» 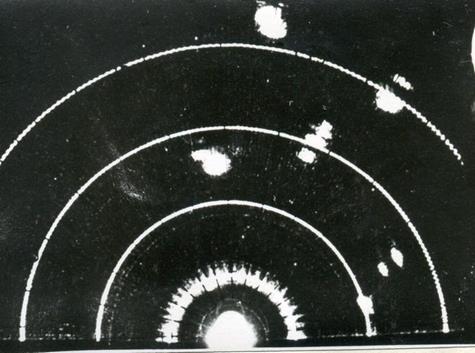 Рис. 9.6. Вид грозовых засветок в режиме «Метео» Режим «Контур». То же самое, что и «Метео», но наиболее сильные сигналы полностью подавляются схемой локатора. Это значит, что если мощность отраженного сигнала превышает определенный уровень, то электрическая схема локатора уменьшит ее до нуля – как будто нет никакого отраженного сигнала. Разумеется, на экране в этом месте свечения вообще не будет. Поэтому в режиме «Контур» посередине ярких грозовых засветок будут черные «дырки», как будто бы там нет грозы. На самом деле в этих местах самая сильная грозовая деятельность (рис. 9.7). Данный режим и предназначен для того, чтобы пилот смог выявить самые опасные места. Режим «Снос». Этот режим предназначен для измерения угла сноса. Используется широкая диаграмма направленности, но сканирование антенны отсутствует. Направление антенны (линии развёртки), можно изменить клавишами управления антенной. Порядок определения угла сноса будет описан далее. Порядок подготовки БРЛС к работе. Порядок работы с БРЛС во время предполетной подготовки заключается в следующем. 1) При нахождении ВС на стоянке необходимо включить АЗС (автомат защиты сети) и другие выключатели питания (зависит от типа ВС). 2) Установить режим «Готов», наклон антенны +10°, регуляторы «Яркость» и «Метки» установить в среднее положение, а «Контраст» в крайнее левое.  Рис. 9.7. Вид грозовых засветок в режиме «Контур» 3) Включить локатор нажатием клавиши «РЛС» на индикаторе (включение). Через 3-5 минут, после прогрева элементов локатора, его можно перевести в режим «Земля». Перед этим необходимо убедиться в отсутствии людей и крупных отражающих объектов в секторе ±100° градусов на удалении до 100 метров. Дело в том, что локатор излучает на частоте 9375 Мгц. Это всего лишь в два с половиной раза меньше, чем частота работы бытовой микроволновой печи, но импульсная мощность БРЛС раз в десять больше. 4) Затем следует отрегулировать яркость экрана и меток дальности. 5) Поочередно устанавливая масштабы от 30 до 250 убедиться, что видны все метки дальности, что они имеют приблизительно круглую форму и расстояние между ними примерно одинаково. 6) Уменьшая угол наклона антенны до нуля, добиться появления радиолокационного изображения объектов, расположенных в районе аэродрома в секторе обзора локатора. Если изображения нет, переключить в режим «Готов» и снова в режим «Земля». Через 20 секунд изображение должно появиться. 7) Установить минимальную яркость экрана и при вращении регулятора «Контраст» убедиться в изменении характера изображения. 8) Установить наклон антенны +5° и режим «Метео». Изображения местных предметов должны исчезнуть. 9) Установить все регуляторы в исходные положения и выключить радиолокатор или установить режим «Готов». После взлета БРЛС можно использовать в полном объеме для навигации и обнаружения зон грозовой деятельности. Метеонавигационный Радиолокатор МНРЛС-85 Разработан для установки на ВС четвертого поколения в комплексе стандартного пилотажного оборудования и обеспечивает решение следующих задач: - обнаружение зон грозовой деятельности и их обход; - сигнализацию о наличии опасных облачных структур по курсу ВС на высоте полета; - обзор земной поверхности с целью решение навигационных задач. В состав МНРЛС входят: антенный блок, два приемо-передатчика с волноводным переключателем, пульт управления. Основные эксплутационно-технические характеристики МНРЛС-85 Дальность обнаружения при Hпол = 12км не менее, км: - очагов кучево-грозовых метеообразований 550 - крупных городов 590 - фона среднепересеченной местности 200 - зона обзора по азимуту, град ±90 - угол наклона антенны, град ±15 - ширина ДНА узкого луча, град 3 - мощность излучения в импульсе, кВт 20 Антенна РЛС представляет собой волноводно-щелевую решетку с электронным управлением положения ДНА в горизонтальной плоскости и устройством формирования, когда углового положения оси ДНА в вертикальной плоскости. Приемо-передатчик служит для генерации и приема отраженных сигналов, обработки полученной информации и выдачи соответствующих сигналов в устройство управления антенным блоком и в систему электронной индикации (СЭИ), где на экране КИНО проектируется условный план местности. Управление работой МНРЛС осуществляется с пульта управления при его работе в составе пилотажно-навигационного оборудования совместно с СЭИ. Радиолокатор МНРЛС имеет три режима работы: "Земля", "Метео", “Контроль". Режим "Земля" обеспечивает обзор земной поверхности в азимутальном секторе ± 90° в целях обнаружения радиолокационных ориентиров и использования их для навигации. Режим "Метео" предназначен для обнаружения зон грозовой деятельности по курсу самолета в передней полусфере при углах наклона антенны ± 15°. Грозовые фронты и кучевые облака в зависимости от интенсивности развития отображаются на КИНО в виде яркостной отметки с градациями различного цвета (красный, желтый, зеленый). Режим "Контроль" предназначен для определения работоспособности PЛC (до конструктивного модуля) с выдачей информации на светодиодную информацию лицевой панели блока приемопередатчика. Кроме того, для контроля работоспособности РЛС предусмотрены: -непрерывный встроенный контроль исправности блоков с индикацией отказавшего блока на КИНО; -режим расширенного контроля для проверки работоспособности станции на уровне взаимодействия между системами. Эксплуатация МНРЛС-85 Управление работой МНРЛС осуществляется с ПУ (рис.63) на котором расположены :
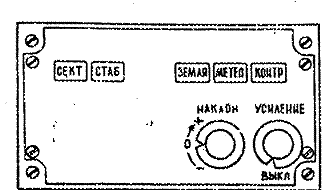 Рис. 63. Пульт управления МНРЛС - 85 - кнопки- табло “ПРД” для выбора и включения в работу одного из приемо - передатчиков. - рукоятка НАКЛОН, для изменения угла наклона антенны в пределах ± 15°, значение угла наклона индицируется на КИНО справа(↑14˚). - кнопка-табло “ЗЕМЛЯ” для включения режима отбора земной поверхности. - кнопка-табло “МЕТЕО” для включения режима метеонаблюдений - кнопка- табло “КОНТРОЛЬ” - для включения систем встречного контроля. - кнопка -табло “СТАБ” - для отклонения системы гиростабилизации антенны. - кнопка- табло “СЕКТ” - обеспечивает сканирование ДНА в секторе ±45° с целью сокращения времени обновления информации. - рукоятка “УСИЛЕНИЕ” служит для регулирования интенсивности радиолокационного изображения на КИНО. При повороте рукоятки против часовой стрелки до упора изображения на КИНО исчезает, а излучение СВЧ энергии в пространство отключается. Перед включением МНРЛС органы управления на ПУ установить в исходное положение: - рукоятку “УСИЛЕНИЕ” – против часовой стрелки до упора; - рукоятку “НАКЛОН” – в положение 0˚; - лампы - кнопки не подсвечиваются. Для включения радиолокатора переключатель режимов на пульте управления СЭИ устанавливается в положение МНРЛС, после чего нажимаются кнопки-табло “ПРД 1”, и “ЗЕМЛЯ”. Подсвет кнопок-табло свидетельствует о включении режимов. После прогрева РЛС через 2…3 мин на экране КИНО появляются электронные метки дальности и курсового угла, яркость свечения которых и развертки регулируются рукояткой “ЯРКОСТЬ” на пульте управления СЭИ (Рис.64). Поочередным переключением рукояткой “ДИАПАЗОН” на пульте управления СЭИ масштаба от 20 до 640км проверяется количество 20-километровых меток - на экране КИНО. В зависимости от масштаба количество меток должно быть следующее: 20км - одна, 40 - две, 80 - четыре, 160 - восемь, 320 - три, 640 - шесть (Рис.65). Азимутальные метки отображаются на всех масштабах в виде пунктирных линий пурпурного цвета, нанесенных через 30°, Проверка работоспособности радиолокатора осуществляется нажатием кнопки-табло “КОНТРОЛЬ”. Нормальная работоспособность РЛС подтверждается отсутствием на экранах КИНО сигналов "ОТКАЗ ПРД", "ОТКАЗ МНРЛС” как при проверке первого, так и второго передатчика. Для проверки радиолокационного изображения на экранах КИНО переключатель масштабов “ДИАПАЗОН” на пульте управления СЭИ устанавливается в положение "20" и нажимается кнопка “СНЯТ. КАРТ”. Вращением по часовой стрелке рукоятки “УСИЛЕНИЕ” на пульте управления МНРЛС необходимо получить появление радиолокационного изображения от наземных препятствий. Оптимальное свечение радиолокационных отображений от наземных препятствий можно получить путем вращения рукояток “НАКЛОН” на пульте управления МНРЛС и “ЯРК” на пульте управления СЭИ. Проверка работоспособности второго комплекта приемопередатчика осуществляется в описанной последовательности после нажатия кнопки-табло “ПРД 2”. Аналогичная проверка работоспособности радиолокатора производится на втором индикаторе КИНО при управлении СЭИ и МНРЛС с пульта управления СЭИ второго пилота. После проверки радиолокатора рукоятка “УСИЛЕНИЕ” устанавливается в крайнее положение против часовой стрелки, рукоятка “НАКЛОН” выставляется на " 00 " и нажимается кнопка-табло “ МЕТЕО”. 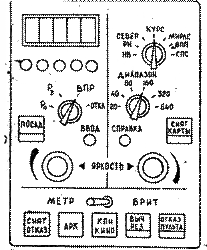 12 вопрос Влияние условий распространения радиоволн на точность определения курсового угла радиостанции Точность определения курсового угла радиостанции автоматическим радиокомпасом зависит от условий распространения радиоволн, на которые влияют рельефы местности, наземные сооружения (различные строения, мачты), элементы конструкции летательного аппарата, отражения радиоволн от земной поверхности и ионосферы. Все эти факторы искажают электромагнитное поле из-механизмов рефракции в среде распространения, дифракции на неоднородностях и отражения от препятствий, что приводит к тому, что минимум кардиоиды несколько отклоняется от направления на радиостанцию, внося таким образом ошибку в определение КУР. Определить ошибки пеленгования, вызванные неизменными препятствиями (рельеф, сооружения), и учесть их можно только по результатам практических измерений на местности. Некоторые ошибки носят сезонный характер и зависят от изменений электрических параметров почвы и местных предметов и вызываются изменением погодных условий. Также при определении КУР следует учитывать явления, характерные для распространения радиоволн средневолнового диапазона: береговой эффект, горный эффект и ночной эффект. |