Проектирование регулируемого электропривода с двигателем постоянного тока в системе генератор – двигатель (Г-Д)». Основная расчетная часть курсового проекта.
 Скачать 1.02 Mb. Скачать 1.02 Mb.
|

5. Разработка системы мониторинга состояния и управления асинхронным двигателем на базе частотного преобразователя ОВЕН ПЧВ3Возможности удаленного управления электродвигателем и мониторинга его состояния являются важными задачами при проектировании любой автоматизированной системы управления технологическим процессом. В рамках учебного процесса мне была поставлена задача - создать программное обеспечение для учебного стенда, обладающее следующими функциями: Возможность удаленного запуска и торможения асинхронного двигателя различными способами (быстрый останов, торможение свободным выбегом, торможение постоянным током и т. д.). Возможность изменять направление вращения двигателя, а также его частоту. Возможность считывать любой параметр асинхронного двигателя, записанный в частотном преобразователе (частоту вращения, ток двигателя, напряжение двигателя, номинальные обороты двигателя, время разгона и торможение и т. д.) Возможность записи необходимого значения в любой параметр частотного преобразователя (если это возможно сделать удаленно) Возможность построения графиков основных характеристик двигателя. Существует несколько способов выполнения этой задачи, так как есть множество инструментов для мониторинга состояния и удаленного управления какими-либо процессами, например использование SCADA-системы. После анализа всех возможных путей решения данной задачи, я пришел к выводу, что нужно использовать среду разработки LabVIEW американской компании National Instruments, т. к. она идеально подходит для решения задач такого рода, обладает простотой освоения и не требует стороннего программного обеспечения для работы с оборудованием (например, OPC-сервер). 5.1. Описание учебного стендаСхема стенда представлена в графической части. Стенд состоит из частотного преобразователя ОВЕН ПЧВ3-2К2-В, асинхронного двигателя с короткозамкнутым ротором мощностью 1,5 кВт, потенциометра, одноканального цифрового измерителя ОВЕН ИДЦ1, калибратора токовой петли ОВЕН РЗУ-420 и пары двухпозиционных переключателей. Преобразователь частоты векторный ОВЕН ПЧВ3 предназначен для управления асинхронными электродвигателями насосов и вентиляторов в промышленности, жилищно-коммунальном и сельском хозяйстве, на транспорте, а также в других областях, в том числе подконтрольных органам Ростехнадзора. Преобразователь частоты векторный ПЧВ3 соответствует требованиям ГОСТ Р 52931. Прибор предназначен для работы со всеми стандартными трехфазными асинхронными двигателями в большинстве существующих промышленных механизмов, в диапазоне мощностей от 0,25 до 90 кВт. Прибор обеспечивает выполнение ряда функций, таких как: 1) Частотный(F) или векторный(V) алгоритм управления двигателем. 2) Автоматическая адаптация (ААД) асинхронного двигателя. 3) Диагностика частотного преобразователя и нагрузки. 4) Защитное отключение по напряжению, току, температуре. 5) Предупредительная и аварийная сигнализация. 6) Выбор источника управления (аналоговые/дискретные входы и RS-485) 7) Ручное и автоматическое управление. 8) Управление по интерфейсу RS-485. 9) Встроенный ПЛК. 10) Прямое и реверсное вращение вала. и др. Более подробную информацию о преобразователе частоты можно найти в руководствах на официальном сайте. Цифровой измеритель ОВЕН ИДЦ1 предназначен для измерения и регулирования различных физических величин, значение которых внешним датчиком может быть преобразовано в сигналы постоянного тока или напряжения. Прибор может быть использован для измерения и регулирования технологических процессов в различных отраслях промышленности, коммунального и сельского хозяйства. В нашем случае прибор может быть использован для отображения текущей частоты вращения асинхронного двигателя, либо тока. Задание частоты может осуществляться 4 способами: С помощью панели оператора преобразователя частоты. С помощью потенциометра, который подключен к аналоговому входу частотного преобразователя и работает с унифицированным сигналом 0-10 В. С помощью калибратора токовой петли ОВЕН РЗУ-420, который также как и потенциометр подключен к аналоговому входу, но работает с унифицированным сигналом 4-20 мА. Удаленно, с помощью интерфейса RS-485. Стенд имеет подключение к ПК, так как частотный преобразователь имеет интерфейс RS-485. Для прямого подключение к USB порту используется преобразователь интерфейсов ОВЕН АС4, который предназначен для взаимного преобразования сигналов интерфейсов USB и RS-485. Преобразователь позволяет подключать к промышленной информационной сети RS-485 персональный компьютер, имеющий USB-порт. 5.2. Краткое описание среды разработки LabVIEW.LabVIEW (англ. Laboratory Virtual Instrumentation Engineering Workbench) — это среда разработки и платформа для выполнения программ, созданных на графическом языке программирования «G» фирмы National Instruments (США). LabVIEW используется в системах сбора и обработки данных, а также для управления техническими объектами и технологическими процессами. Идеологически LabVIEW очень близка к SCADA-системам, но в отличие от них в большей степени ориентирована на решение задач не столько в области АСУ ТП, сколько в области АСНИ. Графический язык программирования «G», используемый в LabVIEW, основан на архитектуре потоков данных. Последовательность выполнения операторов в таких языках определяется не порядком их следования (как в императивных языках программирования), а наличием данных на входах этих операторов. Операторы, не связанные по данным, выполняются параллельно в произвольном порядке. Программа LabVIEW называется и является виртуальным прибором (англ. Virtual Instrument) и состоит из двух частей: блочной диаграммы, описывающей логику работы виртуального прибора; лицевой панели, описывающей внешний интерфейс виртуального прибора. Виртуальные приборы могут использоваться в качестве составных частей для построения других виртуальных приборов. Лицевая панель виртуального прибора содержит средства ввода-вывода: кнопки, переключатели, светодиоды, верньеры, шкалы, информационные табло и т. п. Они используются человеком для управления виртуальным прибором, а также другими виртуальными приборами для обмена данными. Блочная диаграмма содержит функциональные узлы, являющиеся источниками, приемниками и средствами обработки данных. Также компонентами блочной диаграммы являются терминалы и управляющие структуры. Функциональные узлы и терминалы объединены в единую схему линиями связей. LabVIEW поддерживает огромный спектр оборудования различных производителей и имеет в своём составе (либо позволяет добавлять к базовому пакету) многочисленные библиотеки компонентов. 5.3. Концепция системы мониторинга и управления асинхронным двигателемСтруктурная схема системы представлена в графической части. Частотный преобразователь имеет множество регистров. Каждый регистр (или несколько регистров) отвечает за определенную функцию и хранит в себе значение параметра, например регистр 1-20 хранит в себе номинальное значение напряжения двигателя и участвует в формировании математической модели подключенного двигателя. В регистры можно записывать значение параметров, либо считывать их. В некоторые регистры нельзя записывать значение, а можно только считывать их, например это регистры, отображающие текущие состояние двигателя: слово состояния, напряжение, ток и частота двигателя. Исходя из значений параметров, заложенных в регистры, частотный преобразователь формирует управляющие сигналы и посылает их на двигатель, кроме этого частотный преобразователь считывает некоторые параметры двигателя и записывает их в соответствующие регистры. Так как частотный преобразователь соединен с ПК при помощи интерфейса RS-485, мы имеем возможность удаленно осуществлять мониторинг состояния двигателя и формировать управляющее воздействия. Другими словами мы можем считывать значение параметров из регистров, а так же осуществлять запись. Для этого мы пользуемся открытым коммуникационным протоколом Modbus, а именно стандартом Modbus RTU, который поддерживает данным частотным преобразователем. ПК является устройством-ведущим (master), преобразователь – ведомым-устройством (slave). Master осуществляет опрос устройства slave c определенным интервалом времени, например раз в секунду. Данная технология широко применяется в промышленности для организации связи между электронными устройствами. Может использоваться для передачи данных через последовательные линии связи RS-485, RS-422, RS-232. Так как LabVIEW содержит множество библиотек для создания программ, она способна работать с протоколом Modbus напрямую, без использования стороннего программного обеспечения, так как имеется готовая библиотека компонентов. Используя эту и другие библиотеки LabVIEW, мы имеем возможность построить пользовательский интерфейс, который позволит осуществлять отображение состояния двигателя и формировать управляющие воздействия. 5.4. Примеры опроса регистровВ данной главе будут приведены примеры считывания из регистров и записи в них определенных значений. 1. Управление двигателем (пример записи): Управление двигателем осуществляется с помощью регистра командного слова, имеющим адрес 49999 в десятичной системе счисления. Этот регистр состоит из 16 битов, каждый отвечает за определённую функцию. Ниже представлена таблица, в которой указаны эти функции. Таблица 14. Биты командного слова.
Продолжение таблицы 14.
Следовательно, изменяя значение нужных битов можно получать различные командные слова. Командные слова задаются в десятичной системе счисления. Ниже приведены примеры: а) 00000100011111002= 114810 – пуск двигателя в прямом направлении; б) 10000100011111002=3391610 – пуск двигателя в обратном направлении; в) 10000100001010002=3383210 – быстрый останов; г) 10000100001100002=3384010 – останов свободным выбегом; и т. д. За задание частоты отвечает другой регистр, имеющий адрес 50009. Частота задается десятичным числом от 0 до 16384. На рисунке ниже представлена реализация схемы задания командного слова, частоты и места управления (цифровое задание, задание с помощью командного слова, либо комбинированное). Перед опросом регистров необходимо проинициализировать порт, то есть необходимо задать: имя порта, стандарт Modbus, скорость передачи, контроль четности, скорость опроса, а также таймаут. После этого используется специальная функция из библиотеки Modbus, в ней указывается адрес регистра, данные, которые необходимо записать, информация о порте, а так же информация об устройстве, куда нужно выполнить запись (его адрес и стандарт Modbus). Параметры в регистре хранятся в виде массива, то есть перед записью необходимо выбрать преобразование данных. 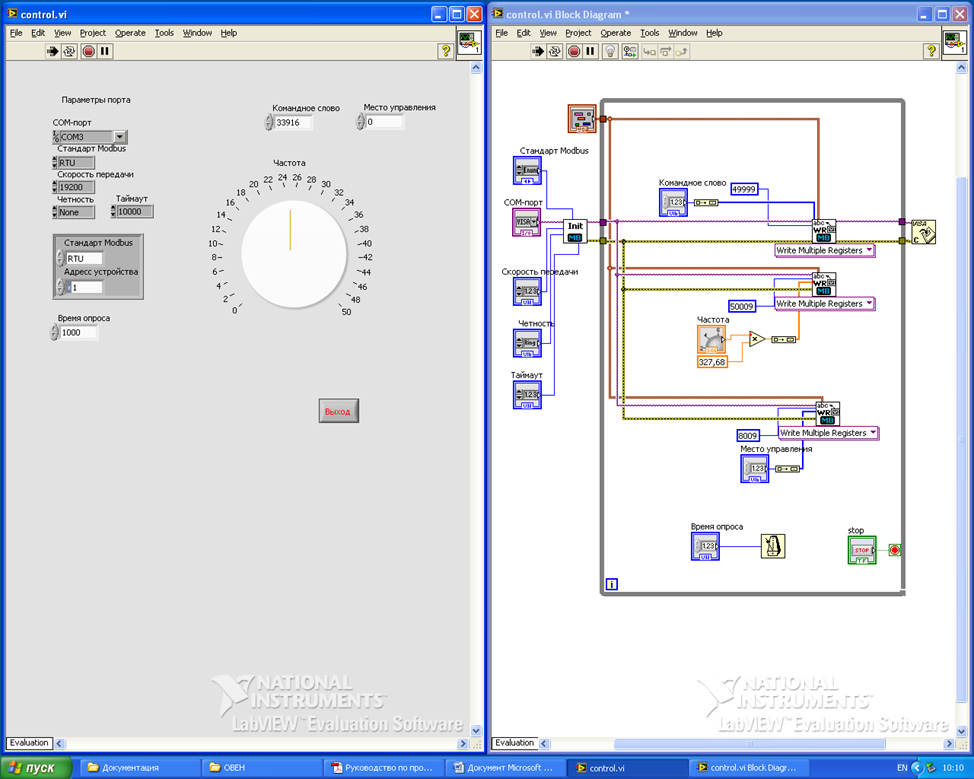 Рис. 9 – Схема записи данных в регистры. 2. Слово состояния (пример считывания): Слово состояния – особый регистр, который хранит текущее состояние электропривода. Он имеет адрес 500199 в десятичной системе счисления. Как и регистр командного слова, он состоит из нескольких бит, каждый из которых отвечает за определенную функцию. Ниже представлена таблица, в которой указаны эти функции. Таблица 15. Биты слова состояния.
Продолжение таблицы 15.
При изменении состояния привода регистр состояния меняет свое значение. Это можно отследить с помощью считывания данных из регистра. Схема считывания данных из регистра представлена ниже. Как и в случаи записи, необходимо проинициализировать порт, далее выбирается специальная функция из библиотеки Modbus. В ней указывается начальный адрес регистра, количество регистров, которые необходимо считать (некоторые параметры, например частота, хранятся в нескольких регистрах). Для правильного отображения данных необходимо выполнить преобразование, так как, в некоторых параметрах по умолчанию смещено положение десятичной точки, для того чтобы осуществлять передачу в формате регистра, например значение регистра 16-13, равное 504, указывает на частоту привода 50,4 Гц. В случаи со словом состояния его удобно преобразовать в логический массив для более понятно отображения данных. 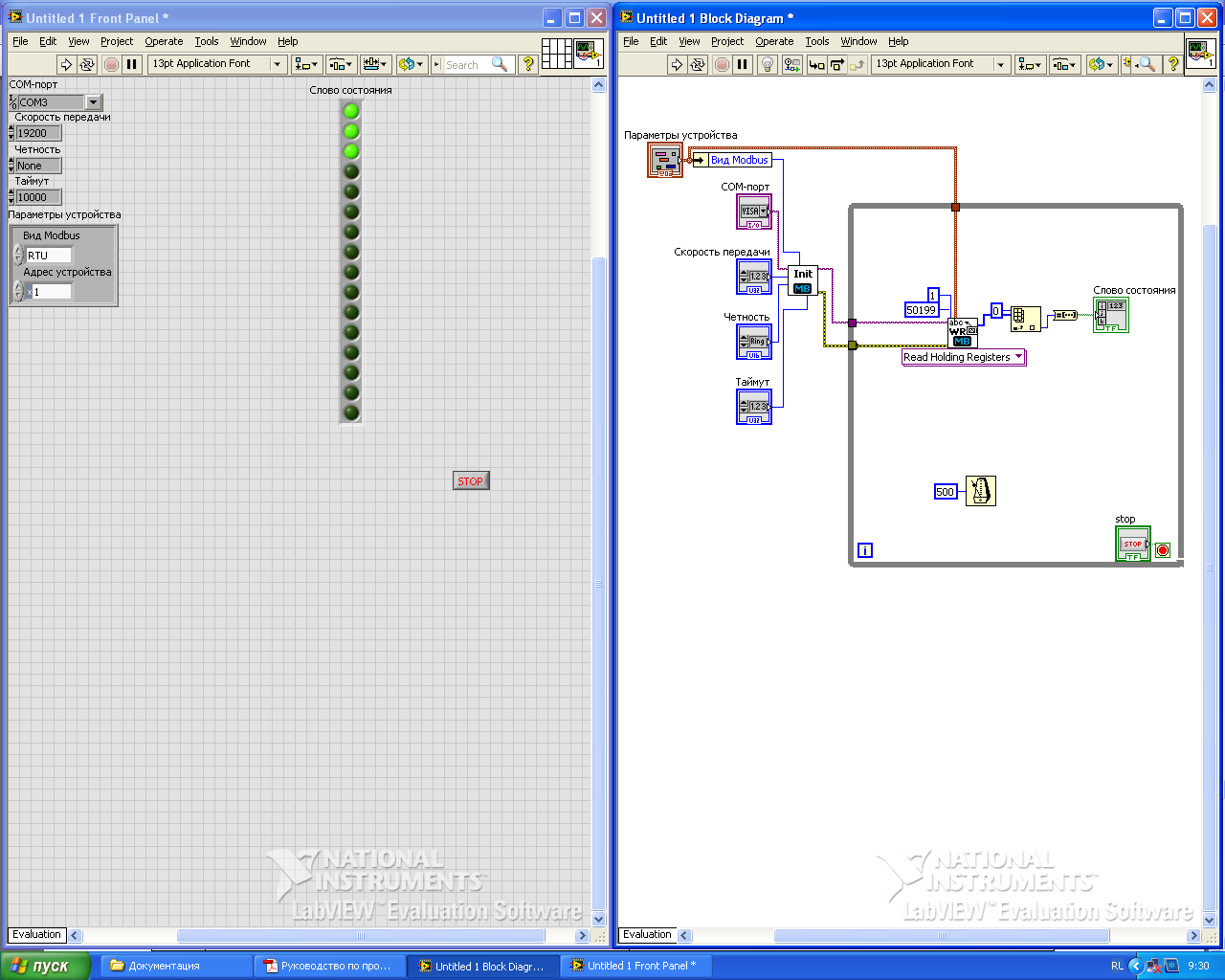 Рис. 10 – Схема считывания данных из регистров. Для того чтобы определить адрес нужного нам регистра необходимо воспользоваться простым правилом: Адрес соответствующего регистра определяется по номеру параметра в ПЧВ3 по следующей формуле: АДРЕС = НОМЕР _ РЕГИСТРА х НОМЕР _ ПАРАМЕТРАх10 -1 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||