Лекция 1. Основные положения теории автоматического управления. Основные положения теории автоматического управления основные определения
 Скачать 106.37 Kb. Скачать 106.37 Kb.
|

|
ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 1.1. Основные определения Теория автоматического регулирования и управления относится к числу научных дисциплин, образующих в совокупности науку об управлении. Основное назначение ее – изучение закономерностей в процессах автоматического управления технологическими процессами (ТП) – производственными, энергетическими, транспортными и т.п. Ее выводы и результаты являются основой для изучения динамических свойств систем управления не только технического характера. Для осуществления автоматического управления создается система, состоящая из объекта управления (ОУ) и тесно связанного с ним управляющего устройства (УУ). Как и любое техническое устройство, систему стремятся создать как бы конструктивно надежной, жесткой, динамически «прочной». Такая система должна выполнять предписанную ей программу действий, несмотря на неизбежные помехи со стороны внешней среды. Основными направлениями повышения эффективности выполнения технологического процесса являются механизация, электрификация и автоматизация отдельных технических операций. Для управления любыми производственными процессами необходимо располагать объективной и достоверной информацией. К информации относятся сведения о структуре управляемой системы или отдельных объектов управления: о внешних и внутренних возмущениях, действующих на технологических процесс; о характере переменных параметров, характеризующих состояние вещества или энергии и т.д. В первую очередь теория информации изучает вопросы передачи информационных сигналов от одного элемента системы к другому по имеющимся каналам связи. При этом основной задачей является – обеспечение максимальной достоверности информации, которая может быть искажена из-за помех или нарушения пропускной способности канала.  Информация, представленная в формализованном виде, позволяющем осуществить ее Информация, представленная в формализованном виде, позволяющем осуществить ееобработку с помощью технических средств, называется данными. Для целенаправленного управления любой сложной динамической системой необходимо наличие ОУ. Восприятие информации - это целенаправленное извлечение информации (при помощи измерительных устройств, например) и ее анализ. Подготовка информации – это перевод информации в данные посредством аналого- цифрового преобразования. Передача и хранение информации – передача происходит по различным каналам связи: электрическим, электромагнитным, оптическим и т.п. Для хранения используют полупроводниковые и магнитные накопители. Обработка информации - осуществляется с помощью ЭВМ для выбора управляющего воздействия, то есть создается алгоритм функционирования. Отображение информации – отображение выполняется в удобном для восприятия человеком виде. Воздействие УУ – это осуществление необходимых изменений в системе при помощи управляющих устройств. Таким образом, если исключается работа оператора при выполнении технологического процесса, то это автоматическое управление, в противном случае, неавтоматическое управление. Основным методом обработки информации является алгоритмизация. Алгоритм – представляет собой совокупность математических и логических операций, связанных между собой в определенной последовательности, которые необходимо выполнить для получения управляющей команды. Простейшим видом алгоритма является передаточная функция – т.е. функциональная зависимость управления одним параметром, выраженная в математической форме. Это зависимость между входными и выходными сигналами (Рисунок 1.2.а). 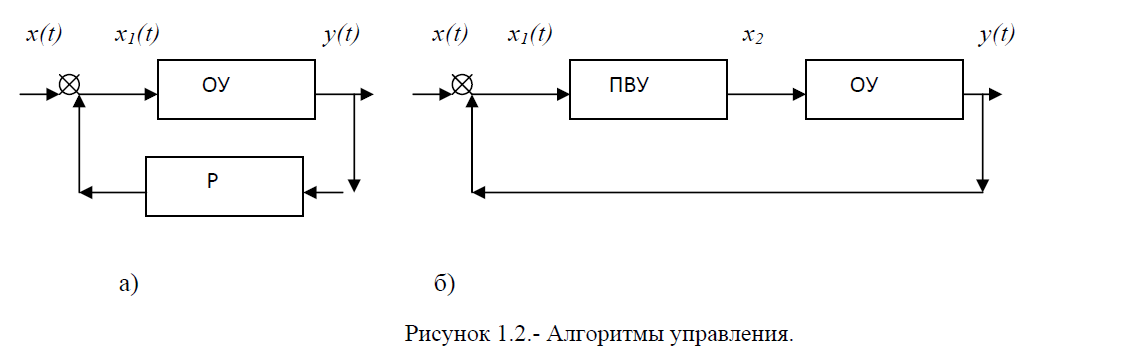 Сложность алгоритма управления определяется степенью сложности ОУ. При Сложность алгоритма управления определяется степенью сложности ОУ. Приавтоматическом управлении ТП используют технические средства автоматики. Простые УУ управляют одним или двумя параметрами ОУ – это м.б. регуляторы температуры, влажности т.п., сложные регуляторы выполняют операции управления в ОУ во времени - это программно-временные устройства (Рис.2.б). В зависимости от вида алгоритма функционирования используют различные типы САУ. Сложные управляющие устройства – это управляющие вычислительные машины с адаптивной программой выполнения операций регулирования. 1.2. Особенности комплексной автоматизации В реальном ТП установившийся режим является частным случаем, так как на ОУ постоянно действуют различные возмущения: внешние – обусловленные изменением подачи энергии или количества продукта; внутренние – обусловленные ухудшением технологической эффективности использования ОУ. В любом случае возмущение вызывает отклонение технологического параметра от заданного значения. Для обеспечения заданных качественных и количественных показателей выполняемого технологического процесса автоматическое управление должно быть сведено к автоматическому управлению отдельными операциями. В этом случае автоматическое управление называют автоматическим регулированием. Комплексная автоматизация – это форма организации сложного ТП, основанная на совершенной технологии и комплексной механизации основных и вспомогательных операций, когда исключается участие человека. Для различных объектов сельскохозяйственного производства комплексная автоматизация может выполнять следующие операции: 1) Исследование ТП, определение его технических и экономических показателей; 2) Автоматический контроль технологических параметров; 3) Расчет комплексных параметров и оперативный контроль их значений; 4) Расчет оптимальных режимов ведения ТП; 5) Расчет и формирование управляющих воздействий на УУ или ИМ; 6) Автоматическое управление при кратковременных отказах оборудования (блокировка). Однако операции управления пуском и остановкой технологического оборудования, его ТР и КР, то есть разборка и сборка оборудования, не автоматизированы. Комплексная автоматизация возможна при непрерывной поточности ТП и обеспечивается надежными техническими средствами автоматики. Основные требования, предъявляемые к технологическому оборудованию: 1) возможность переработки сырья в непрерывном потоке с обеспечением заданных показателей; 2) высокая устойчивость регулируемого параметра к внешним и внутренним возмущениям; 3) достаточная надежность технологического оборудования. Устойчивость ТП зависит от устойчивости технологических объектов к возмущениям, т.е. от статических и динамических характеристик ОУ. Автоматическое управление ТП м.б. осуществлено как по каналу продукта, так и по каналу энергоносителя. Например, большинство машин: сепараторы, дробилки, смесители имеют постоянный объем и постоянную скорость (вращения) движения рабочих органов. Здесь возможно управление только по каналу продукта, что крайне нежелательно, так как это приводит к изменению производительности оборудования, нарушению синхронности его работы, 7 внесением добавочных возмущений. Следовательно, при разработке автоматического ТП необходимо управление осуществлять по каналу энергоносителя. Поэтому сконструировали машины с переменной скоростью движения рабочих органов, тем самым повысили устойчивость ТП. Под надежностью работы технологического оборудования понимают его способность сохранять свои параметры, обуславливающие работоспособность в заданных пределах и заданных условиях эксплуатации. Общая надежность системы автоматического управления зависит от числа и надежности отдельных элементов, входящих в систему: Робщ = (1-Р)n , или Робщ = (1-Р1)(1-Р2)…(1-Рn), где Р1…Рn - надежность элементов системы; n – количество элементов. Повысить устойчивость и надежность работы САУ к отказам и аварийным возмущениям можно введением в структуру ТП промежуточных межобъектных емкостей. При отказе любого технологического оборудования выполнение ТП прекращается на период времени, необходимый для устранения неисправности. Если же ввести промежуточные емкости, то после отказа какого-либо оборудования процесс некоторое время будет продолжаться. Необходимая величина промежуточной емкости определяется из условия накопления продукта за период аварийного возмущения: Qср = Vем / τав. ,__ |