Курсовая работа по ТАУ Файзуллин А.А.. Пкгк. 191
 Скачать 234.15 Kb. Скачать 234.15 Kb.
|

ОглавлениеВведение 4 ПКГК.1912002.ОПД05-01.ЛРТО 4 1.Принципиальная схема САУ 6 2. Воздействия, элементы и функциональная схема САУ 7 3. Краткое описание режима работы и принципа построения САУ 9 4.1. Двигатель постоянного тока независимого возбуждения 11 4.2. Генератор постоянного тока 13 4.3. Магнитный усилитель 14 4.4. Тахогенератор 15 4.5. Потенциометр 15 5. Структурная схема и передаточные функции САУ 16 6. Устойчивость САУ и Д-разбиение в плоскости одного параметра 18 6.1 Критерий устойчивости Раусcа 18 7. Качество САУ в статических и динамических режимах 22 Заключение 28 Список использованной литературы 29 ВведениеТеория автоматического управления (ТАУ) является отраслью науки, в которой рассматриваются проблемы построения систем автоматического управления (САУ) техническими объектами вне зависимости от их физической природы (механическими, электромеханическими, тепловыми, химико-технологическими и др.)[1]. Основной задачей автоматического управления является поддержание определенного закона изменения одной или нескольких физических величин, характеризующих процессы, протекающие в объекте управления, без непосредственного участия человека. Эти величины называются управляемыми величинами. Если в качестве объекта управления рассматривается хлебопекарная печь, то управляемой величиной будет температура, которая должна изменяться по заданной программе в соответствии с требованиями технологического процесса [2]. Современные технологические объекты и производственные процессы на горных предприятиях характеризуется непрерывным ростом скоростей, размеров и мощностей машин и агрегатов, усилением и усложнением взаимной связи между ними. Для эффективного управления технологическим оборудованием горных предприятий необходимо воспринимать, запоминать и перерабатывать с высокой скоростью и точностью такое количество информации, что человек не в состоянии справиться с этой задачей без применения специальных методов и устройств. Область современной науки и техники, осуществляющие управление производственным процессом и машинами без непосредственного участия человека, называется автоматикой. Совокупность связанных между собой управляемых объектов и управляющего устройства называется системой автоматики, или автоматической системой управления [3]. При изучении процессов управления в ТАУ абстрагируются от физических и конструктивных особенностей систем и вместо реальных систем рассматривают их адекватные математические модели, поэтому основным методом исследования в ТАУ является математическое моделирование [4] На базе теории автоматического управления изучаются процессы, происходящие как в переходном, так и в установившемся режиме, и предлагаются пути построения автоматических устройств, реализующих алгоритмы управления, чтобы удовлетворить условиям устойчивости и качества процессов управления. 1.Принципиальная схема САУПринципиальная схема САУ приведена на рисунке 1, на которой видно, что она предназначена для автоматической стабилизации скорости вращения двигателя постоянного тока независимого возбуждения. 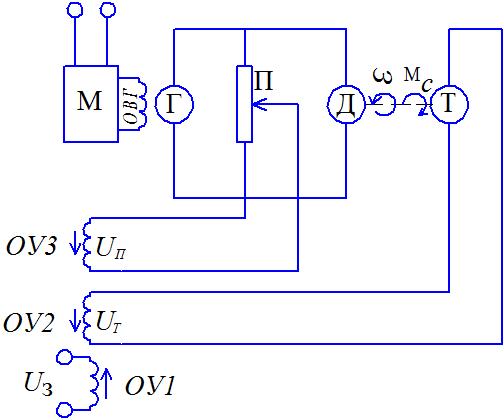 Рисунок 1 - Принципиальная схема САУ скоростью вращения двигателя постоянного тока Д - двигатель постоянного тока с обмотками независимого возбуждения ОВД; Г - генератор постоянного тока с обмотками возбуждения ОВГ Т - тахогенератор; П – потенциометр. 2. Воздействия, элементы и функциональная схема САУСАУ любой сложности состоит из объекта управления и одного или нескольких контуров управления, каждый из которых имеет в своем составе физические элементы, выполняющие определенные функции: измерения, преобразования, усиления сигналов, выработки определенных законов управления или регулирования, осуществления силовых воздействий с целью изменения состояния объекта, осуществления обратных связей и т.д. Воздействия в САУ бывают внешние и внутренние. САУ любой сложности и физической природы можно представить в виде совокупности различных функциональных элементов и соответствующих прямых и обратных связей, т.е. функциональной схемы. Функциональная схема исследуемой САУ приведена на рисунке 2.  Рисунок 2 - Функциональная схема САУ Рисунок 2 - Функциональная схема САУUЗ - напряжение задания; UТ - напряжение, пропорциональное частоте вращения двигателя; ∆U - напряжение рассогласования(статическая ошибка регулирования); UМ - выходное напряжение магнитного усилителя; UГ - выходное напряжение генератора; UП - напряжение, пропорциональное напряжение генератора; ХP - частота вращения двигателя ; f - частота вращения двигателя. Объектом управления в данной схеме является двигатель постоянного тока с независимой обмоткой возбуждения. Автоматическое управляющее устройство состоит из трех преобразовательных элементов ОУ1, ОУ2, ОУ3. Генератор с магнитным усилителем является исполнительным элементом. Местная жесткая обратная связь состоит из потенциометра и обмотки управления ОУ3. Главная обратная связь состоит из тахогенератора, который в свою очередь является измерительно-преобразовательным элементом, и обмотки управления ОУ2. Обмотка управления ОУ1 в данной схеме является заданием. Внешним возмущающим воздействием на объект управления является момент сопротивления на валу двигателя Мс. Ошибкой регулирования ∆U в данной САУ является разность между напряжением задания Uз и напряжением, пропорциональное частоте вращения на двигателя Uт, измеренной тахогенератором. |