Практическая аэродинамика
 Скачать 0.99 Mb. Скачать 0.99 Mb.
|

|
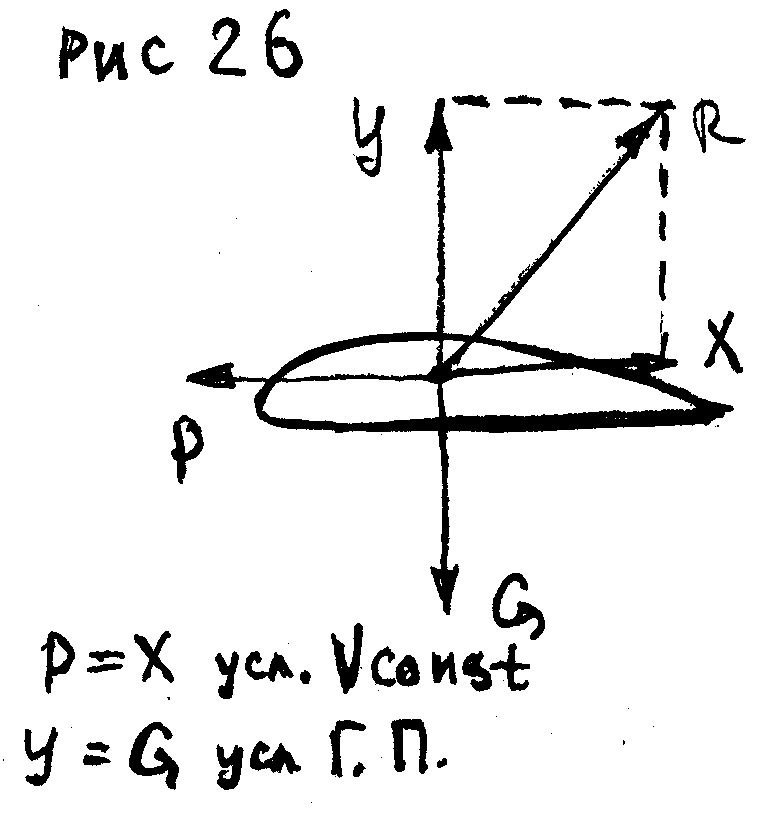
Рис. 22. Выдвижные закрылки увеличивают кривизну профиля, толщину и площадь крыла, тем самым снижая удельную нагрузку на крыло. Удельной нагрузкой на крыло называется вес ЛА на единицу площади крыла. Измеряется в кг/м2. Чем меньше нагрузка на крыло, тем на меньшей скорости может летать ЛА. Поэтому большее распространение получили выдвижные закрылки. Они увеличивают одновременно и Cy за счёт изменения кривизны и толщины, и площадь крыла, снижая скорость ЛА, как бы адаптируя, подстраивая крыло самолёта к полёту на меньшей скорости. 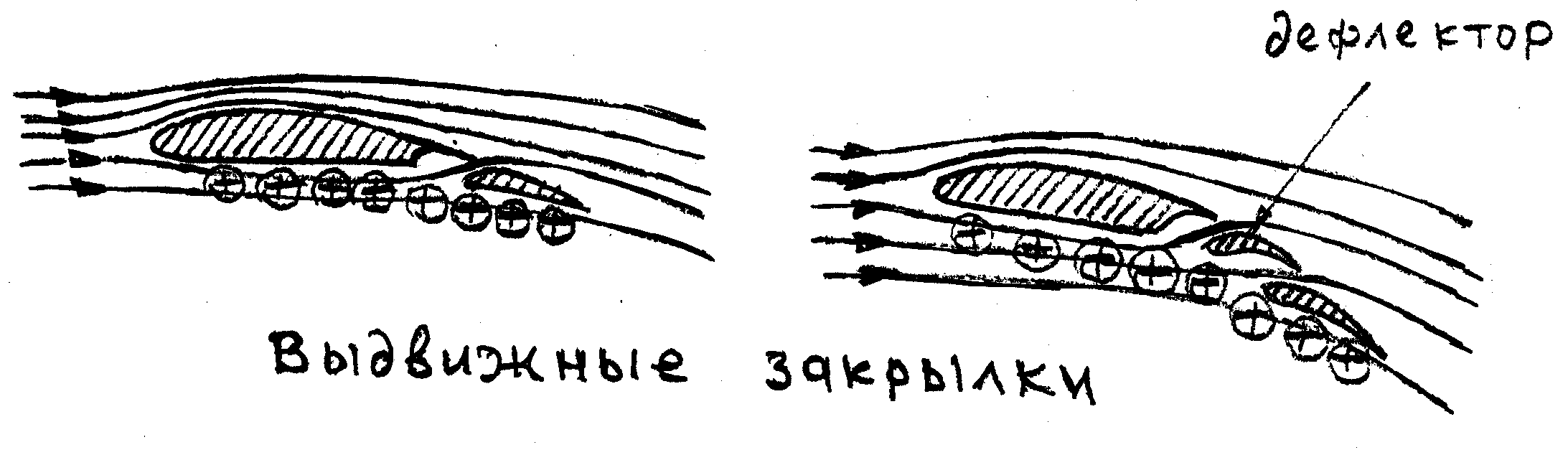 Рис. 23. Иногда используется дополнительный (промежуточный) маленький закрылок, называемый дефлектором. Работа рулей аналогична работе поворотного закрылка с той лишь разницей, что отклоняясь в противоположную сторону, изменяется на противоположную и сила, создаваемая крылом, килём или стабилизатором. Интерцепторы устанавливают на крыльях. Принцип работы схож с принципом работы посадочного щитка. при дифференциальном подъёме на крыльях они могут работать совместно с элеронами или вместо них. На посадке их применяют для резкого снижения подъёмной силы после касания самолётом земли, чтобы исключить подскакивание самолёта. 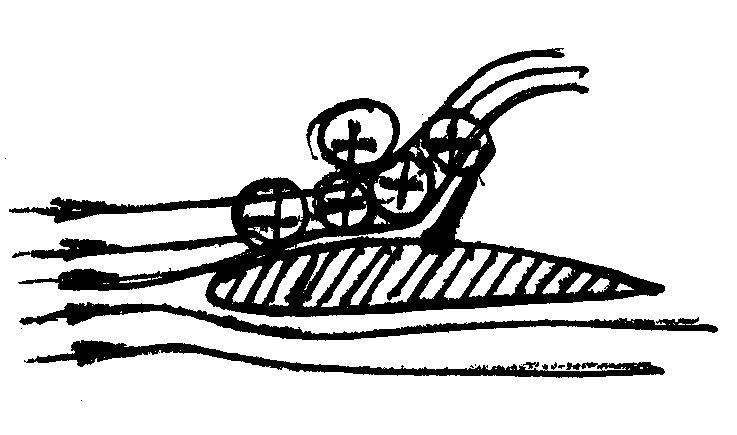 Рис. 24. Триммер — это маленькая аэродинамическая поверхность на задней кромке руля, которая способна отклоняться. Триммер управляется из кабины и служит для снятия постоянных усилий с органов управления. 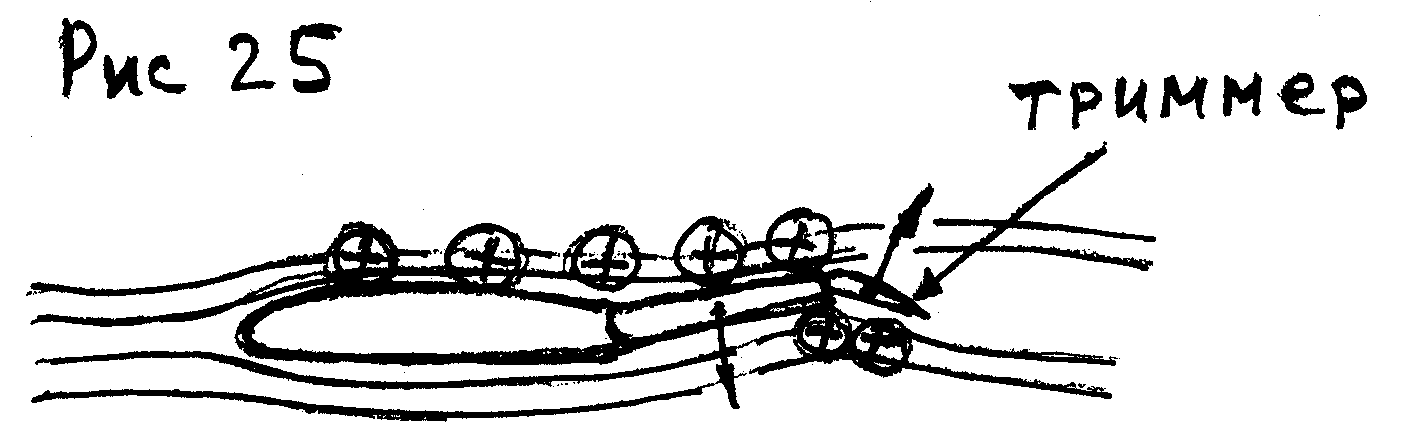 рис. 25 Небольшие усилия всегда присутствуют на ручке управления, они необходимы пилоту для ощущения рулей и являются результатом воздействия обтекающего потока на рули. Однако на разных режимах полёта среднее положение рулей различно, и для снятия постоянных значительных усилий служит триммер. 15. СИЛЫ, ДЕЙСТВУЮЩИЕ НА КРЫЛО НА РАЗЛИЧНЫХ РЕЖИМАХ ПОЛЁТА
P=X+ Gsin — условие постоянной скорости; Gcos=Y — условие постоянного . 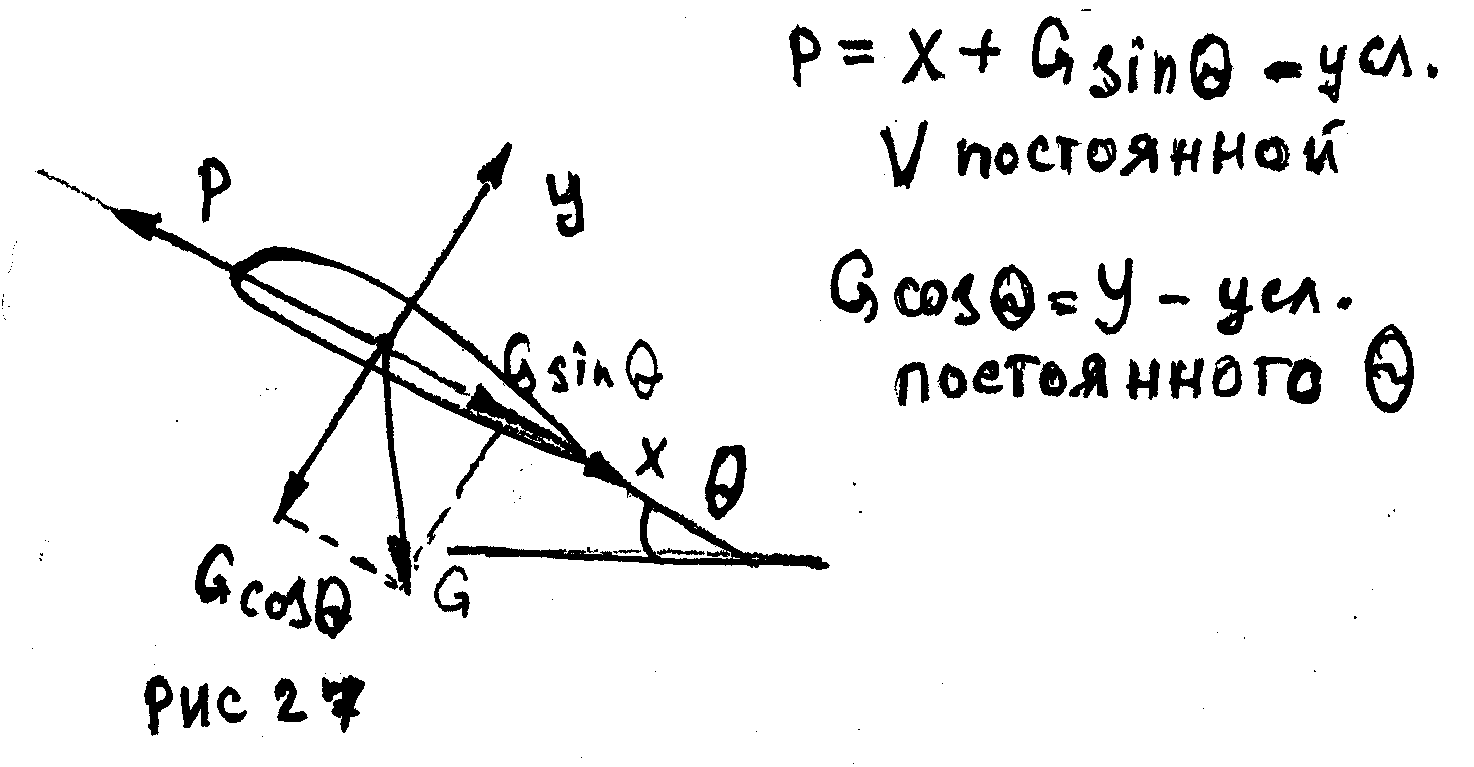 рис.27. Схема сил, действующих в наборе высоты В наборе высоты сила G раскладывается в скоростной системе координат на две составляющие Gcos ( — тета — угол наклона траектории) и Gsin. Gcos уравновешивается подъёмной силой Y, а Gsin суммируется с силой X и образует суммарную силу, которая уравновешивается силой тяги. Силы, возникающие при наборе высоты планером при старте с лебёдки, мы рассмотрим далее в специальной статье. X= Gsin — условие постоянной скорости; Gcos=Y — условие постоянного .  рис.28. Схема сил, действующих на планировании На планировании сила G раскладывается также на 2 составляющие Gcos ( — тета — угол наклона траектории) и Gsin. Gcos уравновешивается подъемной силой Y, а Gsin суммируется с силой X. То есть на планировании роль силы тяги выполняет составляющая силы веса. 16. КРИВЫЕ ЖУКОВСКОГО. ПОНЯТИЕ О 1-ОМ и 2-ОМ РЕЖИМАХ ПОЛЁТА.
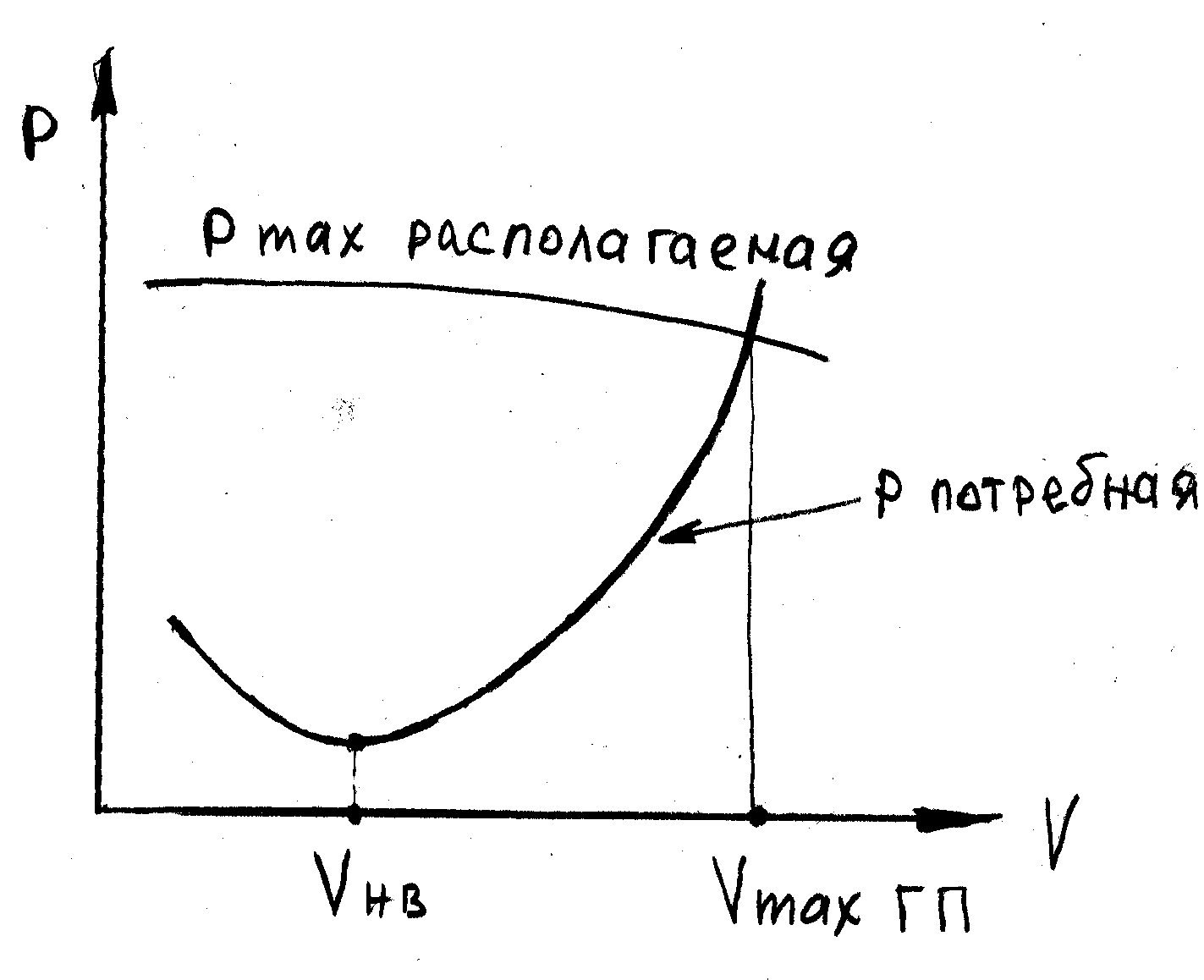
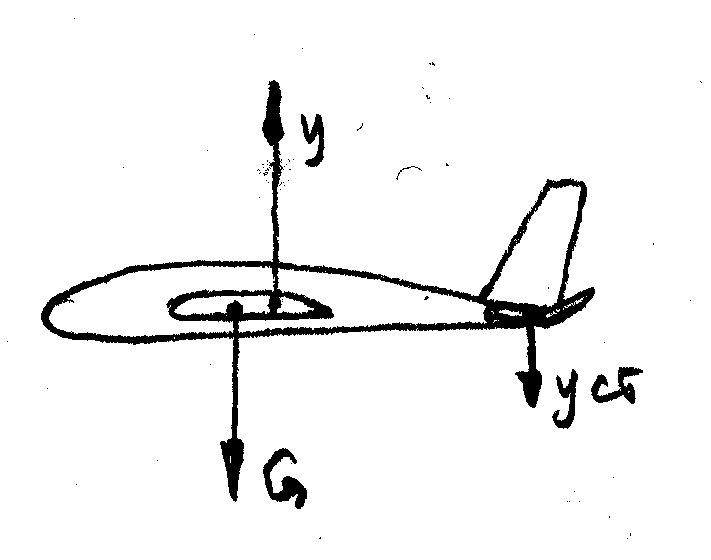
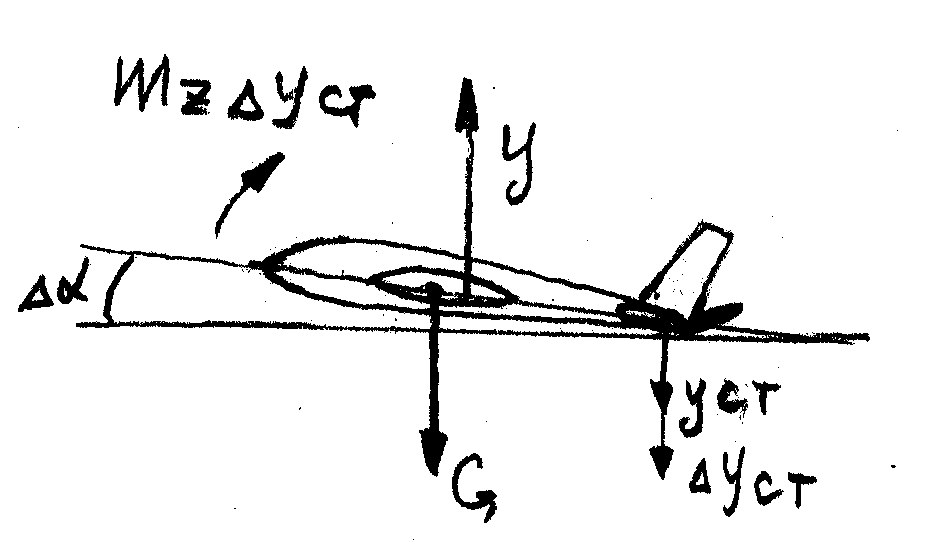
Как видно на графике, минимальная тяга нужна на наивыгоднейшей скорости Vнв. Верхняя кривая отражает максимальную тягу силовой установки в зависимости от скорости полета. Точка пересечения двух кривых является точкой максимальной скорости горизонтального полёта. При снижении тяги двигателя верхняя кривая опускается вниз, и мы видим уже 2 точки пересечения кривых, которые соответствуют двум скоростям, которые располагаются по разные стороны от точки Vнв. То есть ЛА может лететь с заданной тягой на некоторой V большей Vнв и на некоторой V меньшей Vнв. Рис. 30. 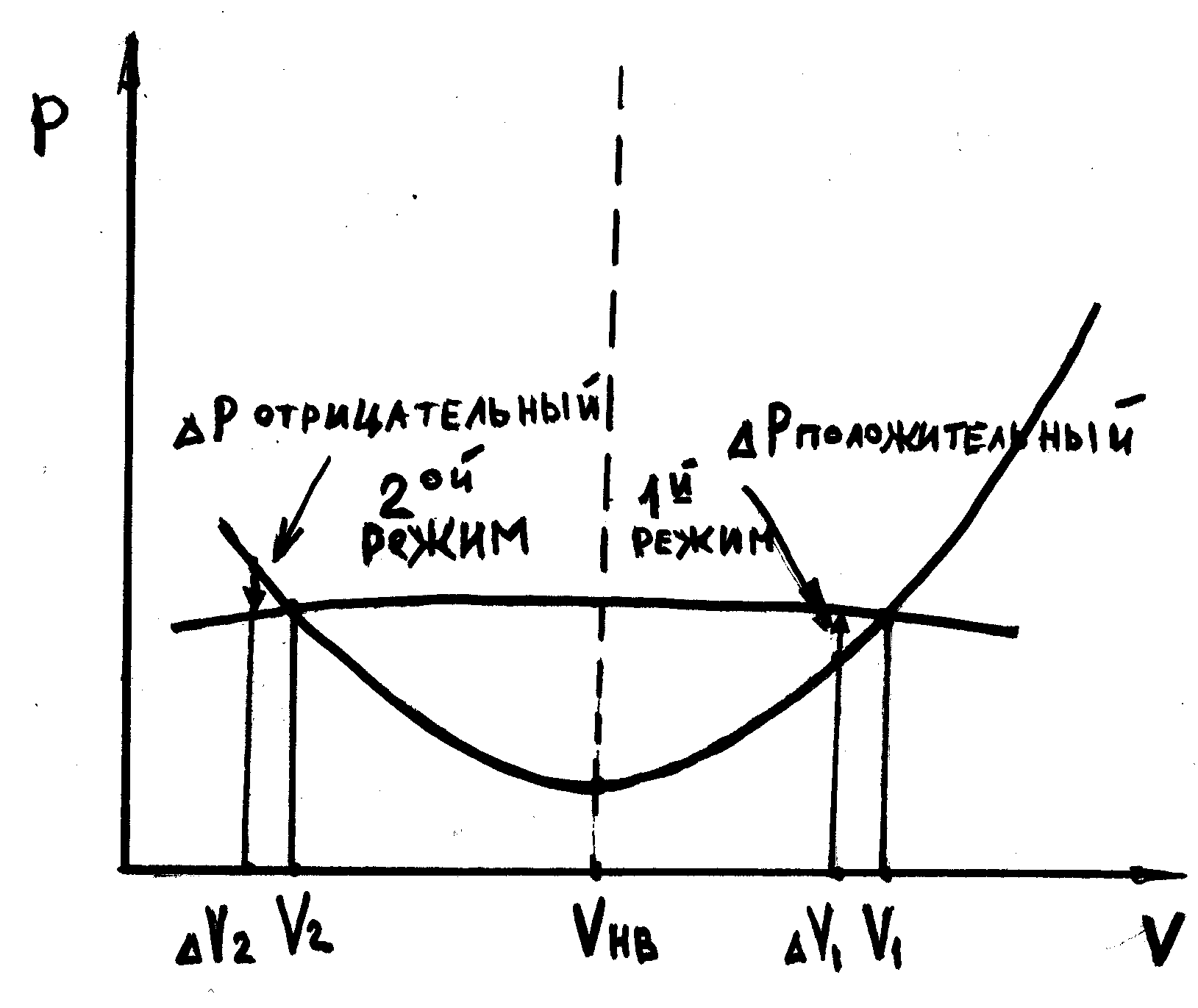 При некотором снижении скорости полета от V1 на V1 возникает остаток тяги P1, который стремится вернуть самолёт в исходный режим, т.е. разогнать до скорости V1. При таком же снижении скорости на V2 от скорости V2 наблюдается недостаток тяги P2 — и самолёт ещё больше теряет скорость, т.е. тормозится, и для восстановления исходного режима полёта требуется немедленное увеличение тяги для того, чтобы превысить P2 — фактически, как говорят пилоты, самолёт висит на тяге. Полёт на V менее Vнв требует повышенного внимания к скорости и постоянного импульсного управления тягой. Полёт на V более Vнв называется полётом на 1-ом режиме, а полёт на V менее Vнв — полётом на 2-ом режиме. Границей 1-го и 2-го режима полёта является Vнв. Полёт на 2-ом режиме сопряжён с повышенной опасностью, так как происходит вблизи V срыва и может выполняться только на самолёте с большим запасом тяги и с высокой приёмистостью двигателя. Техника выполнения требует специальной тренировки. На лёгких и самодельных ЛА не рекомендуется выполнять полёт на 2-ом режиме. Второй режим используется как проходной лишь на посадке от момента выравнивания и до касания. На планере полёт на 2-ом режиме не используется, поскольку это уже будет не полёт, а беспорядочное снижение по ступенчатой траектории. Кривые Жуковского применительно к планеру имеют вид одной кривой, которую можно изобразить как кривую углов планирования. Рис. 31 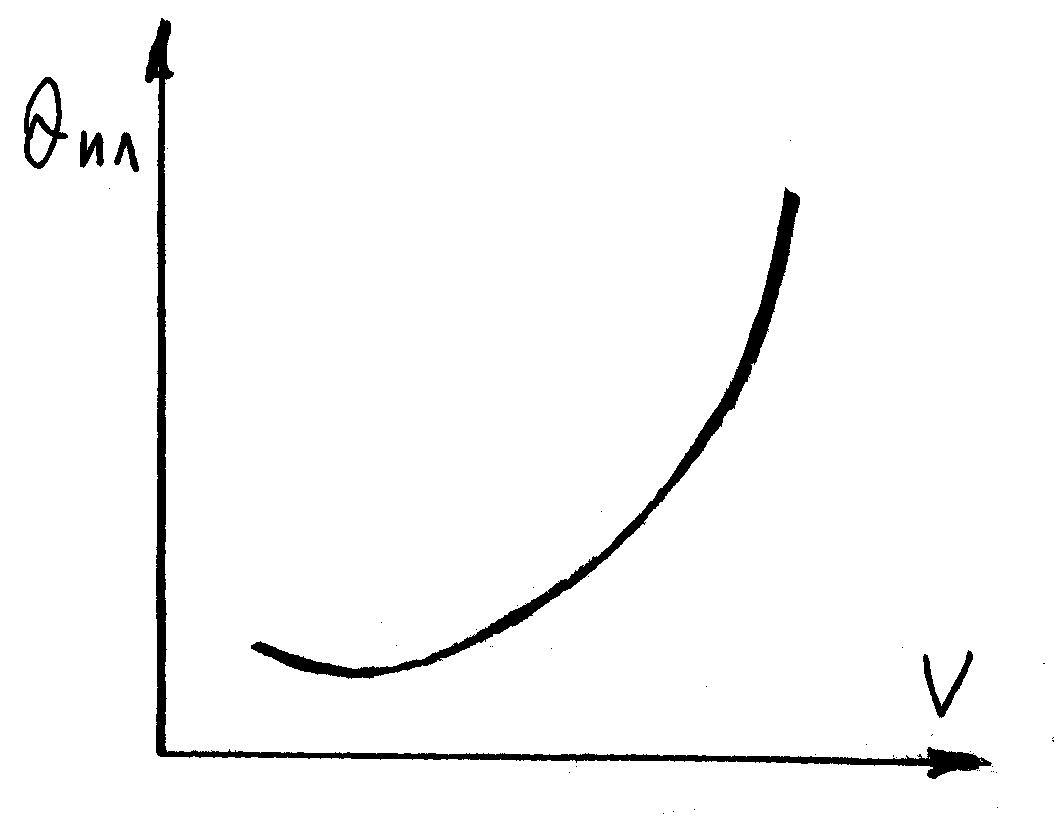 17. СУЩНОСТЬ РАВНОВЕСИЯ, УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ Равновесие сил и моментов, действующих на ЛА в полёте, называется равновесием ЛА. Моментом называется произведение силы на плечо, на которое она воздействует. Например, моменты на этих рисунках равны. 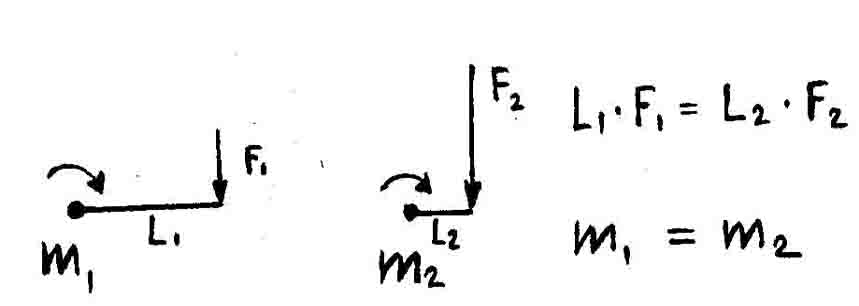 Плечи этих моментов различны на величину воздействующих на них сил. Уравновешивание моментов называется балансировкой ЛА. Балансировка осуществляется рулями. Равновесие может быть устойчивым, неустойчивым и нейтральным. Если равновесие неустойчиво, то после каждого внешнего воздействия на ЛА лётчик должен заново балансировать ЛА. Полёт на таком ЛА утомителен. Поэтому в пилотажном отношении ЛА должен быть устойчивым. Устойчивостью ЛА называется его способность самостоятельно, без вмешательства лётчика сохранять заданный режим полёта и возвращаться к исходному режиму после непроизвольного отклонения под действием внешних воздействий. В полёте на устойчивом самолёте лётчик имеет возможность отвлекаться. Определённая степень устойчивости является необходимым условием управляемости. Управляемостью называется способность ЛА изменять режимы полёта при отклонении рулей. Управляемость — важнейшая характеристика ЛА, поскольку неуправляемый полёт интересен только артиллеристам. 18. ПОНЯТИЕ О САХ КРЫЛА. ЦЕНТРОВКА ЛА. Положение ЦТ (центра тяжести) или ЦД (центра давления) определяется расстоянием от носика профиля. Для удобства это расстояние измеряется не в см или мм, а в процентах. То есть длина всей хорды крыла берётся равной 100%, и расстояние от носика профиля выражается в процентах. Однако это справедливо только для крыла прямоугольной формы, так как хорды во всех сечениях совпадают. Для крыльев сложной формы эта задача решается следующим образом: 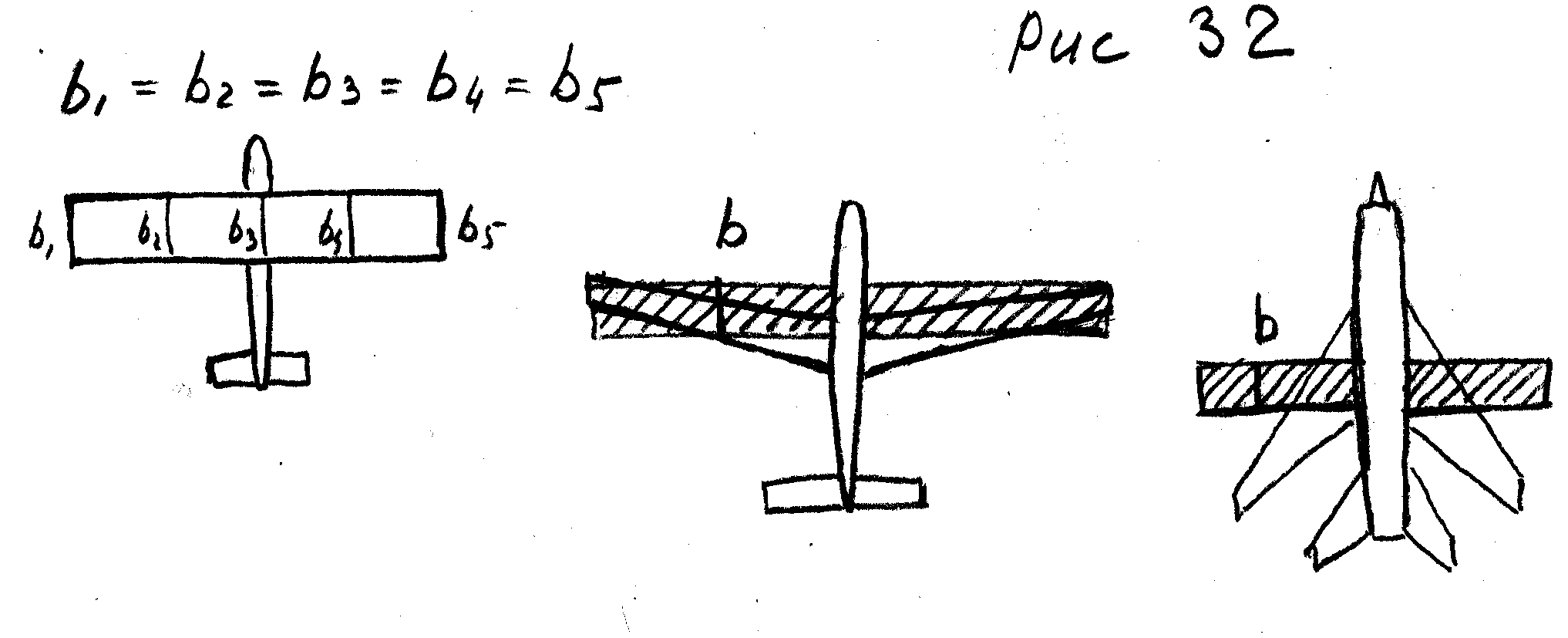 Реальное крыло условно заменяют эквивалентным крылом прямоугольной формы и используют для обозначения положения ЦТ и ЦД. Хорда этого крыла называется средней аэродинамической хордой или САХ. Центром тяжести ЛА называется точка равнодействующих всех сил тяжести всех частей ЛА и грузов, размещённых на нём. Положение ЦТ определяется относительно САХ. Расстояние ЦТ от носика САХ, выраженное в процентах её длины, называется центровкой ЛА. Центровка ЛА может изменяться в зависимости от наличия членов экипажа, грузов или пассажиров на борту, из-за выработки топлива, выпуска шасси и т.д. Но в любом случае она не должна выходить за допустимые пределы. Это очень важно. А почему это важно, мы попытаемся разобраться, изучая следующую главу. 19. АЭРОДИНАМИЧЕСКИЙ ФОКУС. ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ ПО ПЕРЕГРУЗКЕ В сбалансированном полёте на крыло действует подъёмная сила Y, сила веса G и балансировочная сила и момент стабилизатора. Рис. 33. 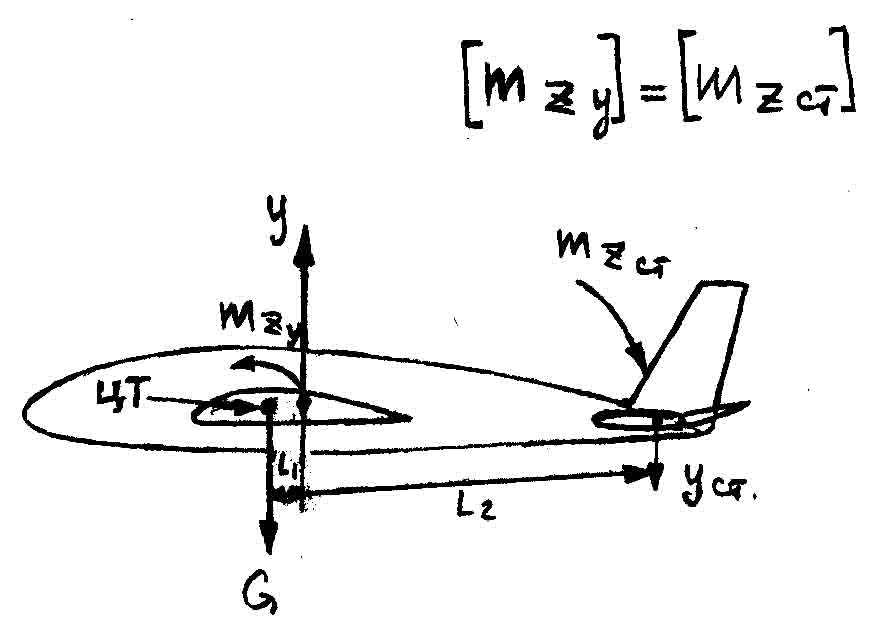 При этом моменты сил от силы Y, и балансировочный момент стабилизатора от силы Уст. равны, но противоположны по знаку и взаимно уравновешивают друг друга. По этой причине ЛА находится в горизонтальном полёте. При случайном увеличении возникает неуравновешенная сила Y (дельта игрек), которая приложена в аэродинамическом фокусе крыла. На самом деле никакой дополнительной силы не возникает, а сила Y несколько смещается назад. Но в аэродинамике для удобства введено понятие аэродинамического фокуса, т.е. точки приложения приращения подъёмной силы. рис. 34 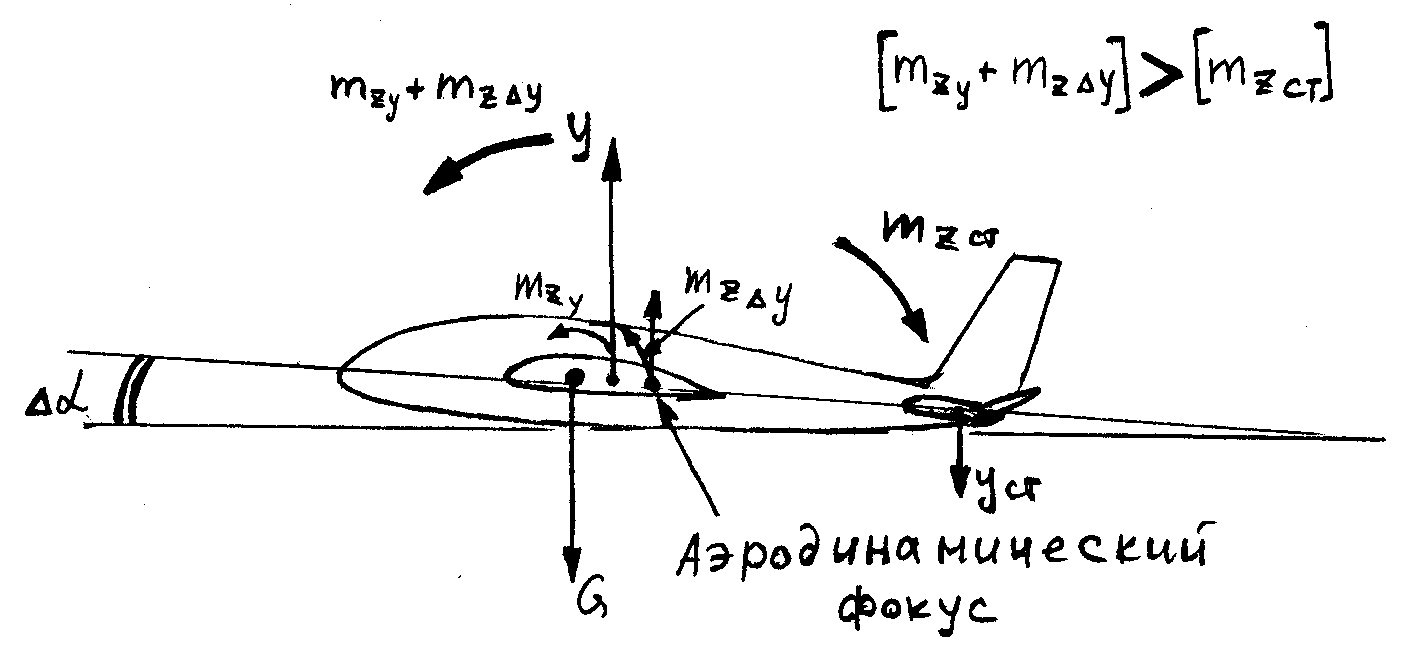 Увеличение подъёмной силы вызовет увеличение перегрузки. Перегрузкой называется величина, обозначающая, во сколько раз сила, приложенная к телу, превышает массу этого тела. Перегрузку ещё называют ускорением. В аэродинамике перегрузка, как и аэродинамическая сила R, раскладывается по осям координат и обозначается ny (эн игрек) — вертикальная перегрузка, nx (эн икс) — горизонтальная перегрузка, nz — боковая перегрузка. В данном случае речь идёт о вертикальной перегрузке ny. Дальнейшее поведение ЛА будет зависеть от взаимного расположения фокуса и центра тяжести. Если фокус расположен позади центра тяжести, то Y создаёт пикирующий момент, который превышает балансировочный момент стабилизатора и стремится уменьшить угол атаки, а следовательно, и перегрузку до исходной. ЛА с такой центровкой называется устойчивым по перегрузке. Если фокус расположен впереди ЦТ, то Y создаёт дополнительный кабрирующий момент, который стремится ещё больше увеличить и ny (перегрузку). ЛА с такой центровкой называется неустойчивым по перегрузке. Рис. 35.  Если фокус совпадает с центром тяжести, то Y не создаёт никакого момента и ЛА сохраняет полученную дополнительную перегрузку. Такая центровка называется нейтральной по перегрузке. Таким образом, расположение фокуса позади центра тяжести является обязательным условием устойчивости ЛА по перегрузке. Расстояние между нейтральной центровкой и фактической центровкой называется запасом центровки или запасом устойчивости ЛА по перегрузке. При всех вариантах загрузки и заправки ЛА центровка должна находиться в допустимых пределах. ЛА должен всегда иметь минимальный запас центровки, ни при каких условиях нельзя допускать нейтральной или запредельно задней центровки. В авиации и по сей день происходят аварии и катастрофы из-за пренебрежения или незнания необходимости контроля центровки ЛА. Каждый ЛА имеет свой диапазон допустимых центровок, он приводится в инструкциях экипажу и инженерно-техническому составу. 20. УСТОЙЧИВОСТЬ ПО СКОРОСТИ Статической устойчивостью по скорости называется способность ЛА сохранять заданную скорость без вмешательства лётчика. Статическая устойчивость по скорости обеспечивается аэродинамической схемой и запасом центровки.
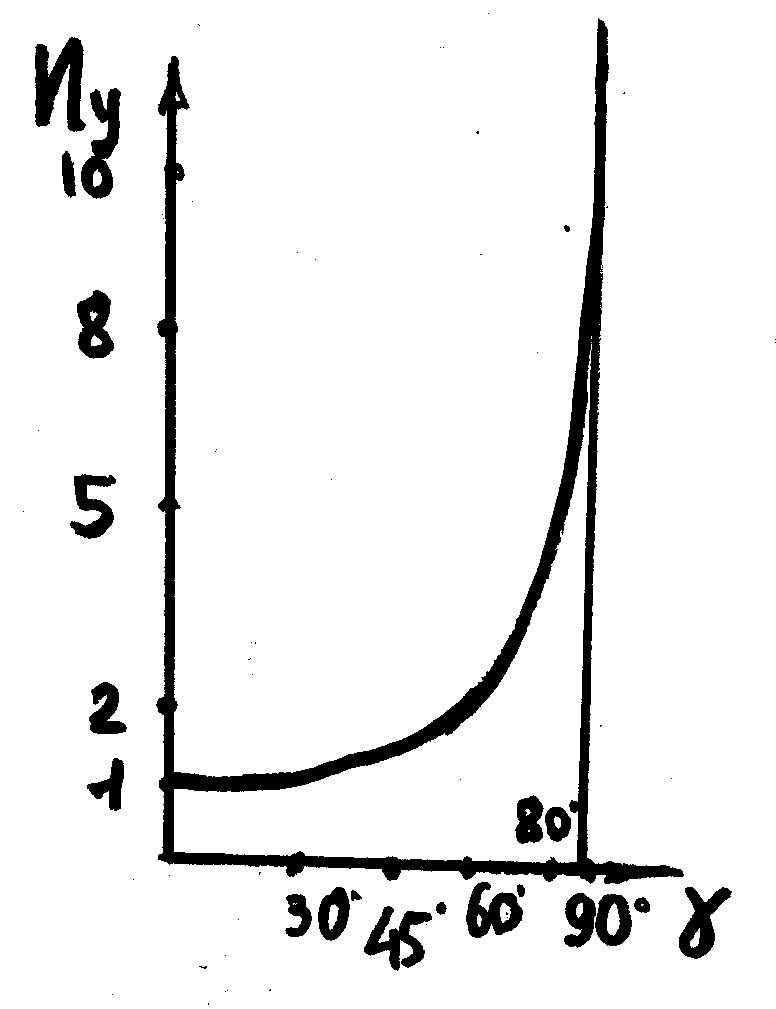
Рис. 36. При случайном увеличении скорости увеличивается подъёмная сила на стабилизаторе, создаётся небольшой кабрирующий момент и ЛА, несколько увеличив , начинает набирать высоту. Скорость снижается, момент стабилизатора возвращается к исходному и ЛА возвращается в исходный режим. При снижении скорости подъёмная сила стабилизатора уменьшается, ЛА опускает нос и происходит разгон скорости. При достижении исходной скорости стабилизатор поднимает нос ЛА и восстанавливается исходный режим. 21. ПРОДОЛЬНАЯ УПРАВЛЯЕМОСТЬ Продольной управляемостью называется способность ЛА изменять под действием руля высоты. Управляя рулём высоты, лётчик управляет направлением и величиной подъёмной силы стабилизатора. Под действием этой силы ЛА может поворачиваться вокруг поперечной оси Z, изменяя тем самым угол атаки крыла. Продольная управляемость сильно зависит от центровки ЛА, а также от площади руля высоты, стабилизатора и длины хвостовой части фюзеляжа. При передней центровке ЛА более устойчив по перегрузке, и для создания требуемой перегрузки необходим больший расход руля высоты, и, наоборот, при предельно задней центровке устойчивость минимальна, и ЛА резко реагирует на малейшее отклонение руля высоты. 22. ПОПЕРЕЧНАЯ И ПУТЕВАЯ УСТОЙЧИВОСТЬ Поперечной устойчивостью называется способность ЛА самостоятельно выходить из образовавшегося крена. Поперечная устойчивость обеспечивается положительным V крыла и расположением бокового фокуса ЛА выше центра тяжести. При случайном накренении самолёта опущенное крыло устанавливается почти горизонтально, и подъёмная сила на нём увеличивается, а поднятое крыло добавляет к углу крена ещё и угол — угол поперечного V крыла. Подъёмная сила на нём уменьшается, и возникает восстанавливающий момент mx, который стремится убрать крен. Рис. 37 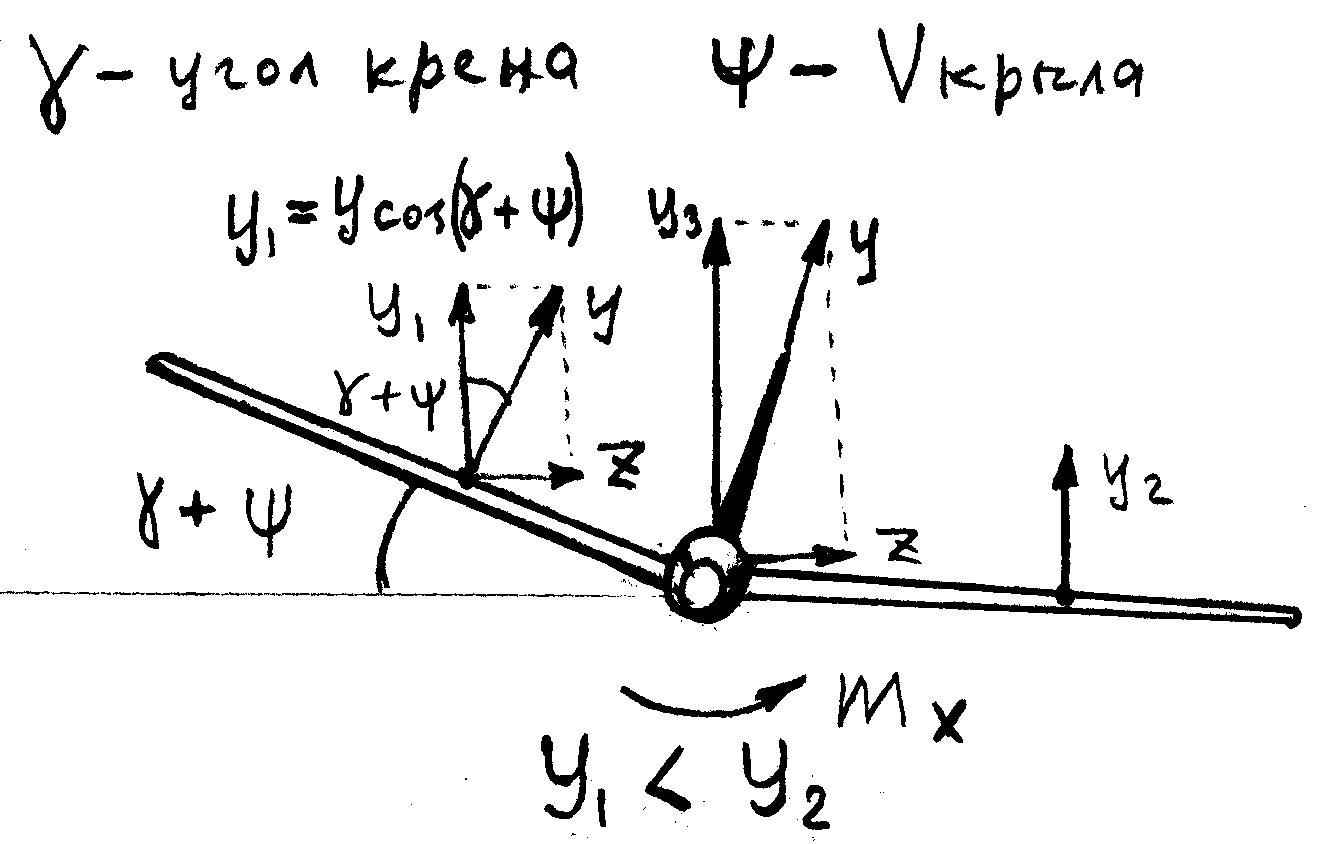 Также при случайном накренении ЛА наклоняется и Y подъёмная сила, которая раскладывается на боковую силу Z и вертикальную составляющую Ycos . Из-за наличия боковой силы Z ЛА начинает двигаться в сторону опущенного крыла, т.е. появляется угол скольжения, набегающий поток начинает обтекать ЛА как бы немного сбоку и начинает воздейcтвовать на боковую поверхность ЛА. 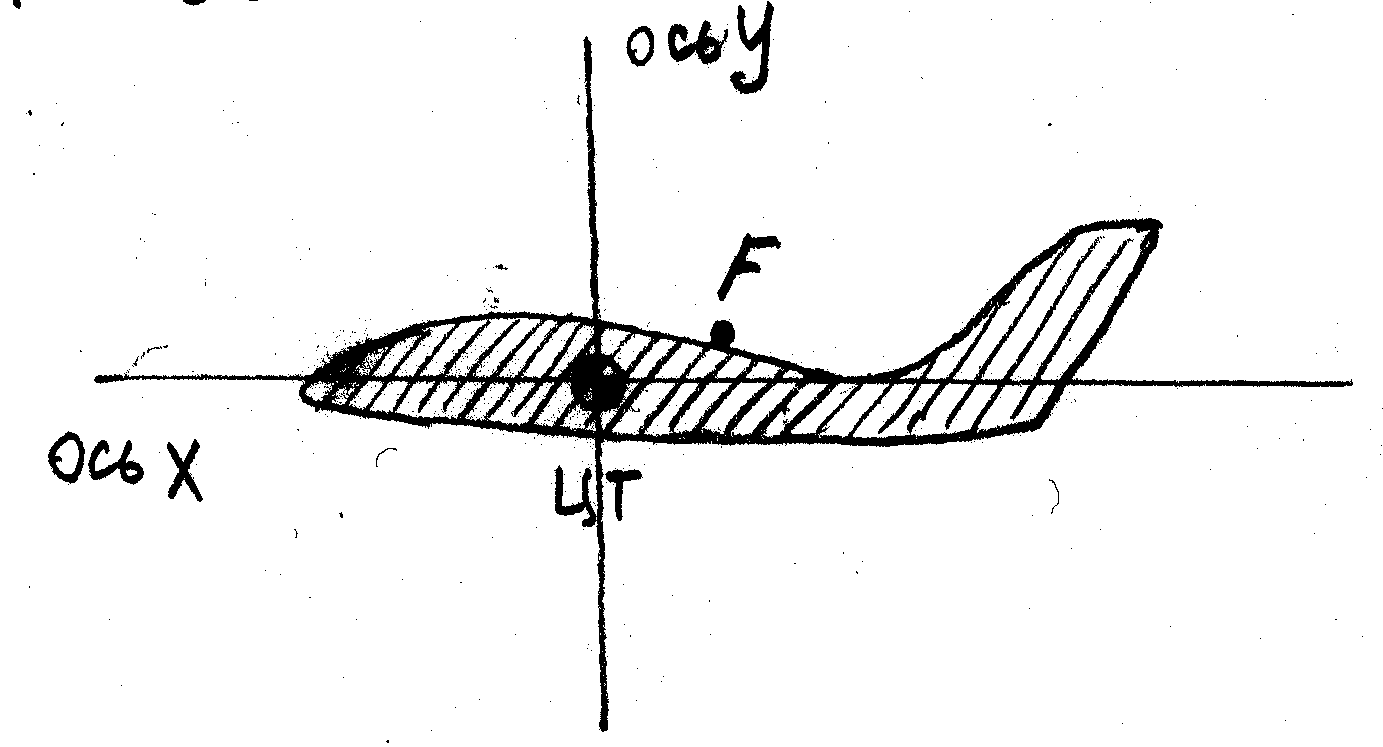 Рис. 38. Боковая поверхность ЛА тоже имеет свой аэродинамический фокус — точку, в которой прикладывается боковая сила, равнодействующая всех боковых сил, воздействующих на ЛА, Как мы видим, из-за большой площади киля боковой фокус находится позади и выше ЦТ.. Боковая аэродинамическая сила, воздействуя на точку F фокуса, стремится повернуть ЛА вокруг продольной оси X (убрать крен) и вокруг вертикальной оси Y (убрать скольжение). Из этого следует, что поперечная и путевая устойчивость обеспечивается в основном расположением бокового аэродинамического фокуса позади и выше центра тяжести ЛА. Это обеспечивается в основном подъёмом и площадью вертикального оперения. 23. ПОПЕРЕЧНАЯ И ПУТЕВАЯ УПРАВЛЯЕМОСТЬ Поперечная и путевая управляемость обеспечивается достаточной площадью, углами отклонений и расположением рулей, элеронов и руля направления. Эти параметры подбираются при проектировании ЛА из расчёта удовлетворительной управляемости на эксплуатационных режимах. Однако на критических режимах полета, например, при сваливании, поперечная и путевая управляемость, как впрочем и продольная, могут сильно ухудшаться вплоть до полной потери управляемости. Это вызвано, как правило, обтеканием оперения и крыла на , намного превышающих кр, а также «затенением» оперения фюзеляжем или крылом. 24. ВИРАЖ (СПИРАЛЬ). 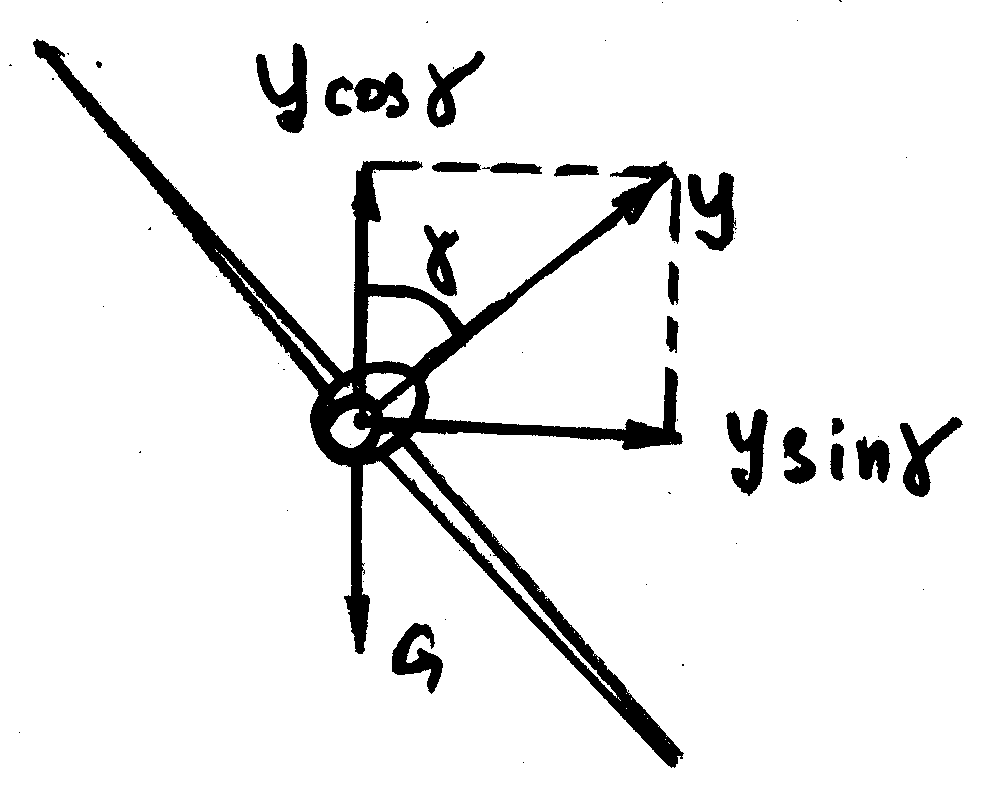 рис. 39.Схема сил на вираже. Вираж – это разворот в горизонтальной плоскости на 360о. Спираль — это тоже разворот, только с потерей или набором высоты. Вираж или разворот при помощи создания крена (гамма) едва ли не самый важный и распространённый маневр ЛА. Каждый полёт, если это не подлёт по прямой, включает в себя выполнение разворотов. Поэтому очень важно понять физический смысл выполнения разворота. При выполнении разворота лётчик создает крен, несколько берет штурвал на себя, одновременно увеличивая тягу двигателя, и небольшим движением педалей несколько поворачивает руль направления в сторону разворота. Если полёт происходит на планере или на самолёте с задросселированным двигателем или выключенным двигателем, то вместо увеличения тяги лётчик несколько увеличивает угол планирования. Такой порядок действий у натренированного пилота отточен до автоматизма и не изменяется от типа ЛА, будь то планер или стратегический бомбардировщик Ту-160. Попробуем рассмотреть, почему происходит так, а не как-нибудь иначе. При создании крена подъемная сила Y раскладывается на две составляющие Ycos и Ysin, при этом первая Ycos — должна компенсировать вес ЛА, а вторая Ysin — искривлять траекторию в горизонтальной плоскости. Для того, чтобы не допустить снижения ЛА, необходимо увеличить подъёмную силу Y настолько, чтобы составляющая Ycos была равна весу. То есть при вводе в крен летчик несколько увеличивает угол атаки , а для компенсации возросшего лобового сопротивления увеличивает тягу двигателя или увеличивает угол планирования. Рулём направления пилот компенсирует первоначальный момент скольжения при создании крена. При кажущейся простоте этот маневр таит в себе неприятные моменты, которые нужно знать и умело их обходить. Первое и самое главное. С увеличением угла крена необходимо увеличивать подъёмную силу, то есть перегрузку, а это ведет к резкому увеличению лобового сопротивления. Это самое лобовое сопротивление нужно компенсировать тягой двигателя или увеличением угла планирования. Например, при крене =30о, перегрузка ny=1,15, при этом крене требуется сравнительно небольшое увеличение тяги или угла планирования. При =45о ny=1,43 — это уже значительный прирост перегрузки, и он требует внушительного увеличения тяги. При =60о ny=2 — это уже большой прирост перегрузки, и он требует увеличения тяги более, чем вдвое по сравнению с горизонтальным полётом, а при полёте на планировании перехода на пикирование с углом более 15о. 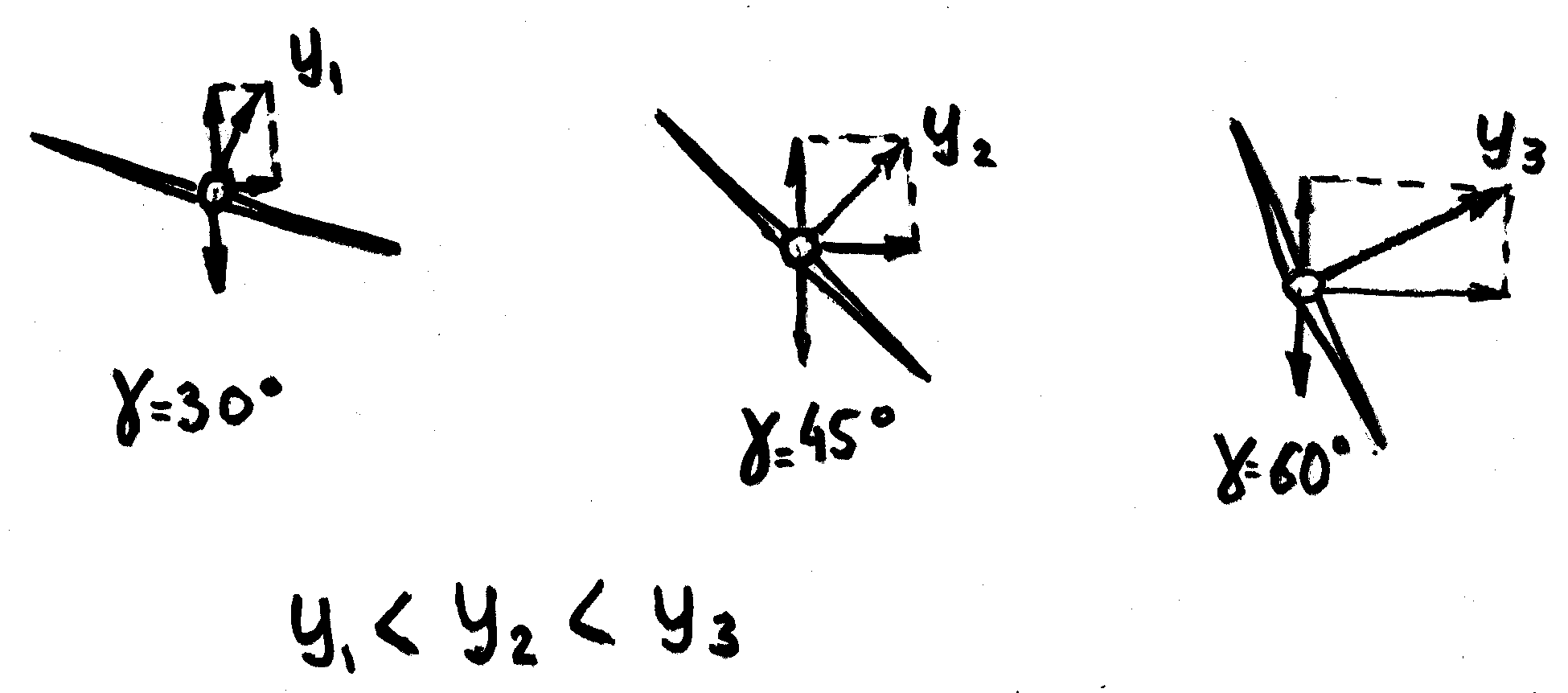 рис.40 Перегрузка в развороте изменяется в зависимости от угла крена по закону косинуса. ny разворота = Графически это выглядит так:
На практике нужно соизмерять энергетические возможности ЛА с желанием «залудить» крутой вираж или разворот. Ввод в разворот с большим креном и малым запасом тяги приводит к резкому торможению, выходу на критический и сваливанию, что на малой высоте ведет к столкновению с землей. Такие манёвры еще более опасны на легких самодельных ЛА, имеющих малую массу и небольшой запас тяги: падение скорости в крутом развороте на них происходит ещё быстрее и обычно происходит в течение 1 — 2 секунд. Существует предельный крен, при котором ЛА может выполнять разворот в горизонтальной плоскости, обусловленный максимальной тягой, которую может развить силовая установка ЛА. Разворот с таким креном называется предельным по тяге. Разворот с большим креном неминуемо вызовет падение скорости. Второй момент, характерный для пилотов-любителей. Не вдаваясь в подробности аэродинамики и посмотрев какой-нибудь художественный фильм про лётчиков, у некоторых возникает безудержное желание зафентилить крутой вираж на глазах изумленной публики. Такой товарищ, взлетев на ЛА, создает энергичный крен, но не зная, что для поддержания горизонтального полета следует увеличить перегрузку и тягу, этого не делает и к собственному искреннему сожалению наблюдает, как его самолётик начинает скользить на крыло и сталкиваться с землей. Часто это удивление бывает последней яркой эмоцией в его жизни. |