Матвед МД3. Процесс разработки и проектирования новой техники
 Скачать 0.69 Mb. Скачать 0.69 Mb.
|

|
b. Кинематическая цепь вращения затравки Назначение: равномерного формирования слоя слитка путём вращения затравки со скоростью nз (об/мин). Уравнение баланса (описание движения от начального звена кинематической цепи – электродвигателя n2 - до конечного звена – вала с затравкой):  , ,где  – частота вращения электродвигателя ( – частота вращения электродвигателя (  – передаточный коэффициент звена настройки (на схеме изображена двупарная гитара); – передаточный коэффициент звена настройки (на схеме изображена двупарная гитара);1 – значения передаточных коэффициентов передач, входящих в кинематическую цепь). Индексы означают: з – затравка; Формула настройки (решение уравнения баланса относительно неизвестного – iз). Предлагается вывести самостоятельно. c. Кинематическая цепь вращения ванны с расплавом материала слитка Назначение: равномерный прогрев материала слитка путём вращения ванны со скоростью nт (об/мин). Уравнение баланса (описание движения от начального звена кинематической цепи – электродвигателя n3 - до конечного звена – вала с ванной):  , ,где – частота вращения электродвигателя (  – передаточный коэффициент звена настройки (на схеме изображена двупарная гитара); – передаточный коэффициент звена настройки (на схеме изображена двупарная гитара);1 – значения передаточных коэффициентов передач, входящих в кинематическую цепь). Индексы означают: т – от термина «тигель» (от Tiegel – нем. ванна, ёмкость для плавления) Формула настройки (решение уравнения баланса относительно неизвестного – iт). Предлагается вывести самостоятельно. Установка электроннолучевого экспонирования подложек Таблица 4. Технологические движения при выполнении операции экспонирования
 Рисунок 6 – Кинематическая схема установки электроннолучевого экспонирования 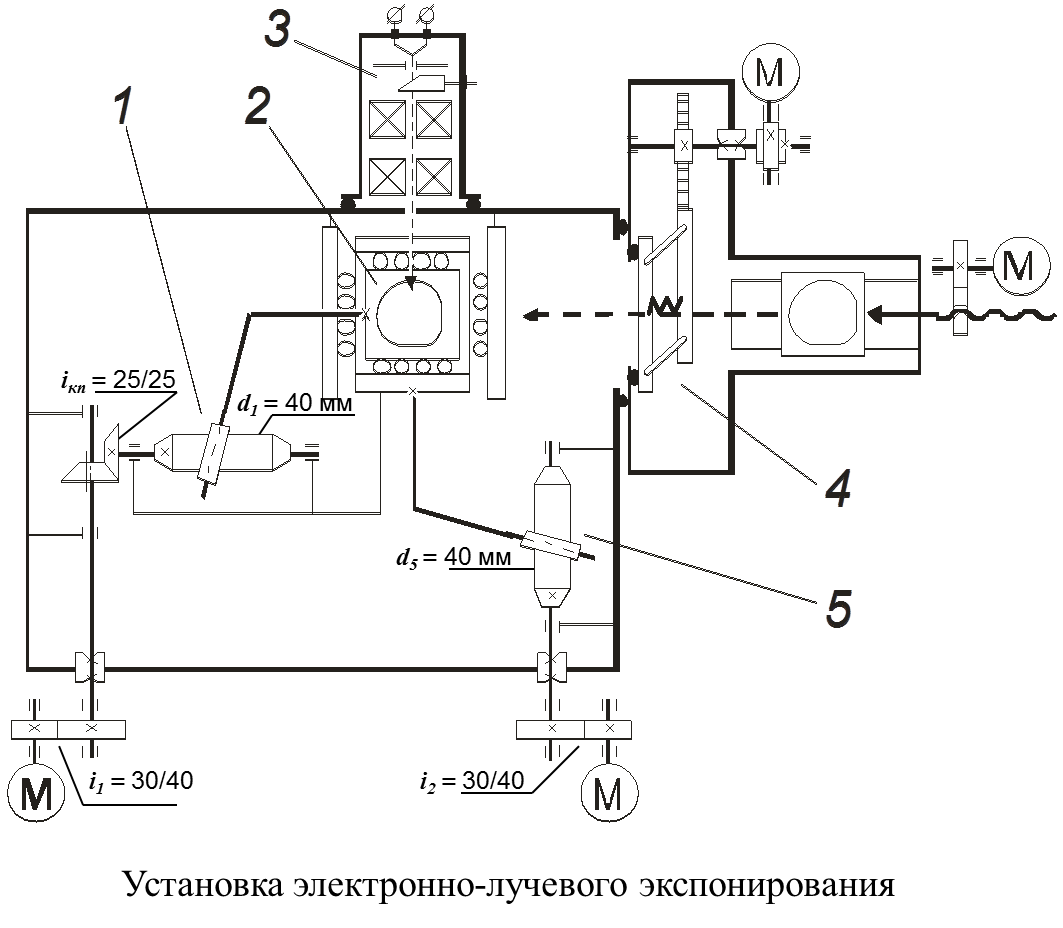 Описание кинематической схемы - привод установки распределённый (каждая кинематическая схема снабжена отдельным источником движения – вращательным электродвигателем); - имеются 2 основные кинематические цепи – для перемещения каретки по оси Х и по оси Y; - в качестве звена настройки используются фрикционные передачи с перекрещивающимися валами; - преобразование вращения в поступательное перемещение производится с помощью фрикционной передачи с перекрещивающимися валами (рисунок 7)  Рисунок 7 – Фрикционная передача с перекрещивающими валами Этапы разработки привода технологической установки: - анализ вариантов и выбор технологических движений, необходимых для изготовления изделия на проектируемой установке; -оценка требований к параметрам движений (скорость, законы движения, развиваемое усилие, допустимые погрешности – по плавности, по позиционированию угловому и линейному); - анализ и выбор структуры кинематических цепей; - определение критериев отбора механизмов для кинематической цепи (например, кинематическая точность, динамическая устойчивость и др); - расчёт и выбор механизмов, устанавливаемых в кинематическую цепь. Предлагается самостоятельно описать кинематическую схему установки УЭЛЭ по аналогии с описанием установки выращивания монокристалла. Вывести передаточный коэффициент фрикционной передачи. Приводы последовательно и параллельной кинематики Технологические движения, выполняемые приводами последовательной кинематики, это движения, передающиеся последовательно от источника движения через передаточные механизмы к исполнительному механизму, и осуществляемые движение по постоянной траектории – по окружности, дуге или по прямой. Приводами последовательной кинематики являются приводы, показанные на рисунках 5 и 6. Технологические движения, выполняемые приводами параллельной кинематики, это движения, которое формируются за счёт согласованного движения нескольких, установленных параллельно механизмов (см. рисунок 8).     Подвижная каретка Исполнительный орган 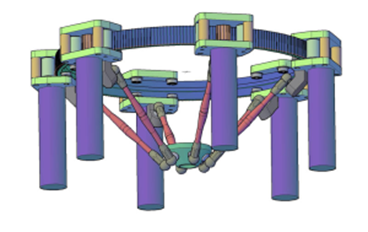 Рисунок 8 – Механизм параллельной кинематики – ротопод В представленном приводе исполнительный орган совершает движения в пространстве за счет изменения положения шести тяг, связывающих каретку, перемещаемую по зубчатому кольцу, с рабочим органом. Вращение зубчатого колеса, размещённого на каретке, заставляет каретку двигать по кольцевой траектории. 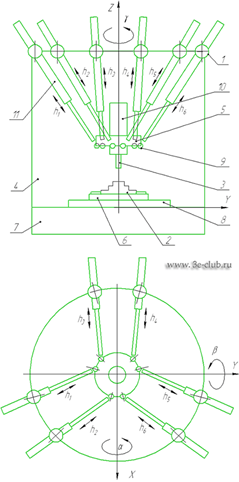  Предложите схему привода параллельной кинематики типа гексапод (см. рисунок 9) Схема должна быть изображена самостоятельно. Допускаются отклонения от стандартной схемы привода. Схема привода должна быть описана и показано, почему кинематика данного привода отнесена к типу «параллельная кинематика» Рисунок 9 – Вариант привода параллельной кинематики типа гексапод Мехатронный привод Мехатронный привод – функционально и конструктивно самостоятельный объект, реализующий движения при аппаратно-программной интеграции составляющих его элементов разной физической природы Структура мехатронного привода (МП): Составляющие МП представлены на схеме (рисунок 10). Составными элементами МП являются: - информационный преобразователь – устройство компьютерного управления движением; - информационно-электрический преобразователь – цифро-аналоговый преобразователь; - электрический (силовой) преобразователь, например, усилитель мощности; - электромеханический преобразователь – управляемый электродвигатель; - механический преобразователь, например, вариатор; - механико-информационный преобразователь – датчики обратной связи по измерению механических параметров МП: положение, скорость; 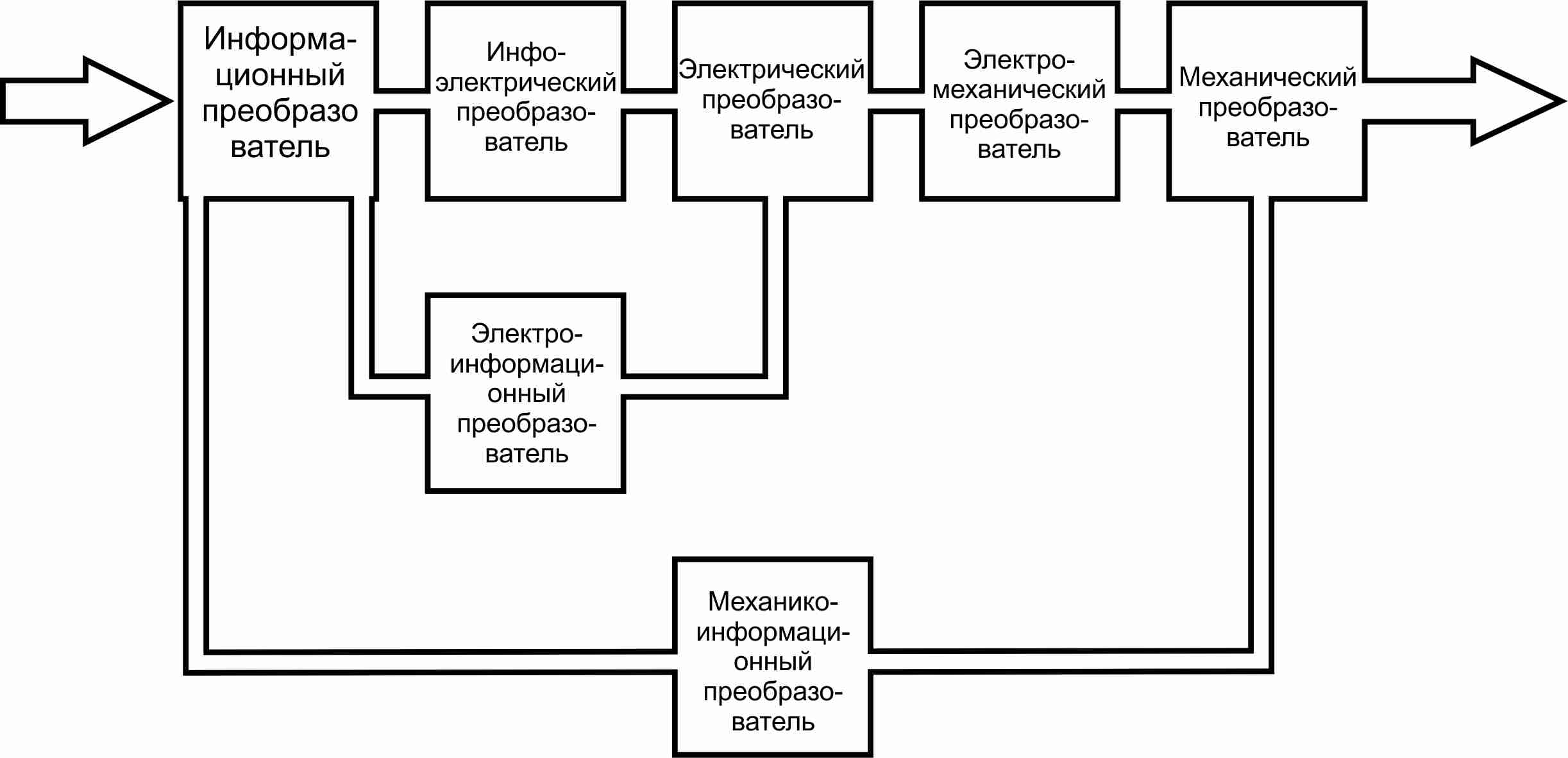 Рисунок 10 – Составляющие МП - электро-информационный преобразователь – устройство обратной связи, контролирующее текущие значения напряжений и токов в силовом преобразователе. В зависимости от состава мехатронного модуля существует три вида модулей: - модуль движения; - мехатронный модуль движения; - интеллектуальный мехатронный модуль. Сравнение структуры тривиального модуля движения со структурами мехатронного модуля движения и интеллектуального мехатронного модуля приведены в таблице 5. Таблица 5 – Сравнение состава мехатронных модулей разного уровня «интеллекта»
Предлагается привести пример механического преобразователя - преобразователя движения. Комментарий: Преобразователи движения предназначены для преобразования одного вида движения в другое, согласования скоростей и усилий (моментов) двигателя и выходного звена. Предпочтительно было бы рассмотреть преобразователь вращательного движения в поступательное и наоборот. Например, винтовая передача, реечная передача. Должны быть представлены схема(1 балл) преобразователя с его характеристиками – передаточным отношением для двух случаев преобразования движений: а) из вращения в перемещение и б) из перемещения во вращение. | ||||||||||||||||||||||||||||||||||||||||||