Проект по модулю
 Скачать 1.27 Mb. Скачать 1.27 Mb.
|

Методика выбора преобразователя типа АИН с ШИМДинамические и энергетические характеристики ПЧ в значительной мере определяются свойствами системы управления (векторная, скалярная). Силовая часть преобразователя практически не изменяется. Задача проекта состоит в выборе силовой части. Поэтому учитываем следующие факторы [11]. Номинальныевыходныенапряжениеичастотапреобразователя выбираются равными номинальным напряжению и частоте асинхронного двигателя. Для регулируемых приводов указывается диапазон регулирования скорости Dω. В скалярных системах управления он не превышает 50, в векторных может достигать 1000 и более. При двухзонном регулировании скорости преобразователь частоты должен допускать повышение частоты сверх номинальной при номинальном выходном напряжении.  Номинальный ток преобразователя при работе на один двигатель должен превышать среднеквадратичный ток двигателя, рассчитываемый по нагрузочной диаграмме. Участки постоянства момента и скорости позволяют рассчитать установившиеся значения тока на i– том участке: Номинальный ток преобразователя при работе на один двигатель должен превышать среднеквадратичный ток двигателя, рассчитываемый по нагрузочной диаграмме. Участки постоянства момента и скорости позволяют рассчитать установившиеся значения тока на i– том участке:Ii уст.iMуст.i , (92) где ωуст.i– установившееся значение скорости на i– том участке; Mуст.i– установившееся значение момента на i-ом участке нагрузочной диаграммы. Среднеквадратичный ток двигателя определяется так же, как и для привода постоянного тока:  I . (93) I . (93)При правильном выборе преобразователя должны выполняться условия: I Iном.пч ; I экстр.дв Iп.пч . (94) где I– среднеквадратичный ток двигателя; Iном.пч – номинальный ток преобразователя частоты; Iэкстр.дв – пиковые (экстремальные) значения тока двигателя по нагрузочной диаграмме; Iп.пч – допускаемые преобразователем значения при перегрузке по току. Величина и длительность перегрузки по току не должны превышать указанных в технических данных преобразователя (например, для преобразователей типа ЭКТ2 нагрузка 1,5∙I1Nдопускается в течение 120 с). Некоторые производители оговаривают полную мощность преобразователя. При наличии такой оговорки должно выполняться условие: Sном.дв 1,5 Sпч , где Sном.дв – номинальная входная мощность двигателя. (95) Sном.дв Pном дв cos . (96) Перегрузочнаяспособностьпомоменту.Система управления преобразователем налагает ограничения на перегрузочную способность по моменту λм. Перегрузочная способность при разгоне привода для скалярных систем находится в пределах λм = 1,2–1,5; для векторных систем управления λм = 1,5–2, для систем прямого управления моментом λм = 2–3. При торможении перегрузочная способность дополнительно ограничена наличием или отсутствием тормозного резистора. Без тормозного резистора нужно принять λм = 0,1–0,3, при его наличии λм= 0,8–1,5. ВыборипроверкатормозныхрезисторовдляпреобразователейчастотыПри большой мощности перетоков энергии в тормозных режимах, когда механическая энергия механизма, преобразованная в энергию заряда конденсатора С, рис. 28, вызывает недопустимое повышение напряжения на звене постоянного тока, применяются тормозные резисторы Rт. От правильного выбора тормозного резистора зависит динамика электропривода при торможении. Рис. 28 иллюстрирует принцип управления тормозным резистором Rт. САУ тормозным устройством следит за напряжением на звене постоянного тока с помощью датчика напряжения ДН. При превышении порога срабатывания транзистор VTт («чоппер») подключает тормозной резистор и сбрасывает излишнюю электрическую энергию в тепловую. В серийных преобразователях тормозной транзистор входит в стандартную комплектацию, а тормозное сопротивление является выносным. Его необходимо рассчитать и выбрать. Предварительно определяется максимальный тормозной момент Мторм.maxс учетом статических нагрузок и требуемого темпа торможения aт: a 1 2 , (97) т t т где tт – время снижения скорости с ω1 до ω2. Мторм.max Jaт . (98) Максимальная механическая мощность торможения при этом: P2торм.maxМторм.max. (99) Максимальную электрическую мощность в звене постоянного тока при торможении за вычетом потерь можно определить следующим образом: P1торм.max P2торм.max1k. (100) где k– коэффициент уменьшения нагрузки при торможении. Этот параметр можно выбрать из табл. 18. 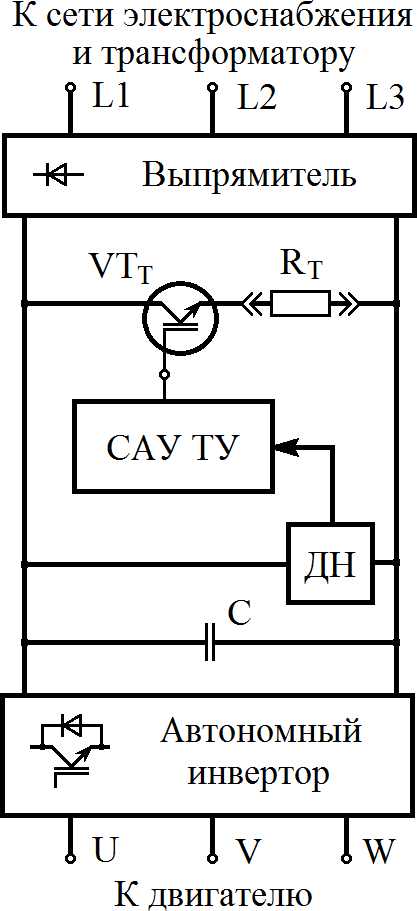 Рис. 28. Включение тормозного устройства Таблица18 Выбор коэффициента уменьшения нагрузки при торможении
Максимально допустимое значение сопротивления тормозного резистора определим из условия обеспечения рассеивания расчетной мощности торможения при номинальном напряжении на звене постоянного тока в предположении, что торможение занимает все время цикла производственного механизма: U2 Rт.maxd. (101) P1торм.max Реально торможение занимает только часть времени цикла τт : т tт 100 % . (102) Tц Поэтому для получения той же средней за цикл мощности сопротивление должно быть уменьшено, что увеличит мощность на этапе торможения. Rт.max Rт.max, (103) K к где Kк – корректировочный коэффициент, определяемый по графику на рис. 29 [11]. 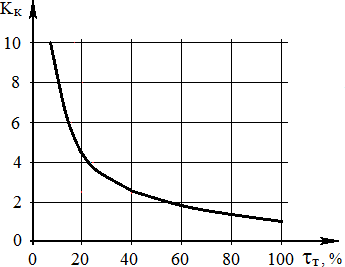 При установке тормозного резистора необходимо предусмотреть вентиляторы либо радиаторы охлаждения. При установке тормозного резистора необходимо предусмотреть вентиляторы либо радиаторы охлаждения.Рис. 29. Корректировочный коэффициент для учета доли времени торможения в цикле |