Программа Автоматизация научных исследований
 Скачать 1.67 Mb. Скачать 1.67 Mb.
|

Выбор закона регулированияРегуляторы с линейным законом регулирования по математической зависимости между входными и выходными величинами подразделяются на следующие виды: пропорциональные (П-регуляторы); пропорционально-интегральные (ПИ-регуляторы); пропорционально-интегрально-дифференциальные (ПИД-регуляторы). Пропорциональный регуляторДля настройки пропорциональных регуляторов (П-регуляторов) необ- ходимо задать коэффициент передачи . Комплексный коэффициент передачи регулятора примет вид 𝑊() = , в таком случае система будет иметь следующий вид [4]: 𝑊 () = 𝑊об(). Таким образом, при использовании пропорционального регулятора для управления объектом комплексный параметр передачи системы воз- растает на каждой частоте в раз. Переходные процессы задаются следующим образом: 𝜇 = 𝜀, где 𝜀 – входное воздействие на регулятор, определяемое, как отклонение регулируемого значения от текущего воздействия; 𝜇 – управляющее воз- действие, которое нацелено на исключение отклонения регулируемого зна- чения от заданного. Коэффициент = ∆𝑈/∆𝜀– параметр регулирования. Если при- нимает большие значения, то существует вероятность возникновения коле- баний в контуре регулирования (рисунок 13)[4]. 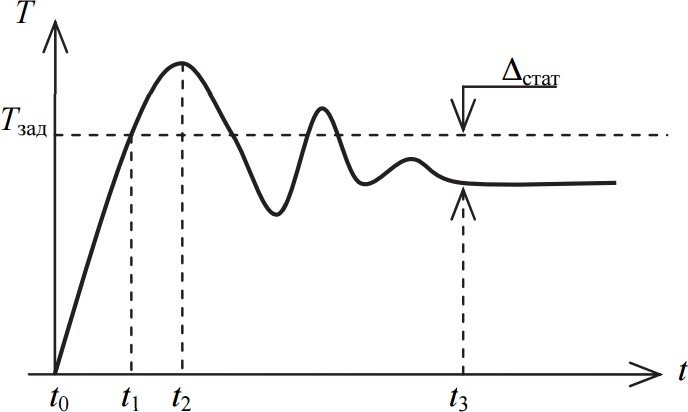 Рис. 13 Колебательный процесс в контуре регулирования в случае пропорционального закона После запуска системы управления, данные с датчика температуры 𝑇изм поступают на сервер. Температура может быть выше или ниже уста- новленной 𝑇зад. В зависимости от этого, сервер отправляет максимально- возможный сигнал интерфейсному модулю MegaD-328, после чего он ад- ресует его соответствующему порту исполнительного модуля, к которому подключены нагревательное или охлаждающее устройство. Алгоритм ра- боты систем охлаждения и отопления не отличается, разница заключается лишь в устройстве на которое подается сигнал, поэтому все рассматривае- мые законы регулирования будут применимы к обоим системам. В связи с вышеизложенным, проведем подробное рассмотрение только одной из си- стем – системы отопления. После подачи максимально-возможного сигнала, начинается процесс повышения температуры. Когда она будет равна 𝑇зад, сервер отправит ко- манду на отключение нагревательного элемента. Учет того, что процесс остывания нагревательного элемента происходит в течение некоторого вре- мени, в ходе которого, температура в помещении до момента 2 будет воз- растать, а затем будет понижаться, происходит с помощью рассмотрения затухающих колебаний. Спустя некоторое время 3, произойдет процесс стабилизации температуры в помещении. После этого, в следствие свой- ства инерционности рассматриваемой системы, как правило, имеет место статическая ошибка, определяемая следующим видом: ∆ст = 𝑇зад − 𝑇изм. Выходной сигнал управляющего устройства примет следующий вид () = 𝑈0 + 𝜀, где 𝑈0 – выходной сигнал управляющего устройства, в случае 𝜀= 0. Пропорционально-интегральный регуляторСпособом исключения статической ошибки, которая возникает в слу- чае пропорционального регулирования, является ввод интегральной со- ставляющей. Воздействие на орган, осуществляющий регулирование, со стороны пропорционально-интегрального регулятора происходит пропорционально интегралу от отклонения регулируемой величины и отклонению [4]: 1 𝜇 = 𝜀+ 𝑇и ∫︁ 0 𝜀𝑑, где 𝑇и – коэффициент, отражающий настройку регулятора. Передаточная функция интегральной и пропорциональной составля- ющей: 1 𝑊пи() = + 𝑇и . Закон, описывающий регулирование [4]: ⎝ ⎛ 1 ∫︁⎞ 𝜇 = 𝜀+ 𝑇из 0 𝜀𝑑⎠ . где 𝑇из – постоянная времени регулирования с обратной связью. В пропорционально-интегральном регуляторе, в случае если 𝑇зад < 𝑇изм, то происходит моментальное включение пропорциональной (статиче- ской) компоненты регулятора, а затем последовательно возрастает инте- гральная (астатическая) компонента. При настройке ПИ-регулятора необходимо задать взаимнонезависи- мые параметры: коэффициент усиления и постоянную времени интегри- рования 𝑇и. Переходный процесс при ПИ-регулировании представлен на рисунке 14 [4]. 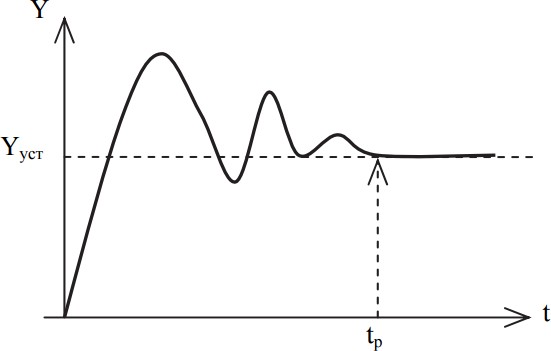 Рис. 14 Переходный процесс при ПИ-регулировании Пропорционально-интегрально-дифференциальный регуля- торИногда необходимо оказать вспомогательное регулирующее воздей- ствие, с этой целью вводится дифференциальная составляющая, которая является пропорциональной к скорости отклонения регулируемого значе- ния величины от заданного: 𝜇д = 𝑇д𝑑𝜀/𝑑. Регуляторы данного вида воздействуют на управляемый объект про- порционально отклонению регулируемого значения, интегралу от имеюще- гося отклонения и темпу изменения этого значения [4]: 1 𝜇 = 𝜀+ 𝑇и ∫︁ 0 𝑑𝜀 𝜀𝑑 + 𝑇д 𝑑 В случае, неравномерного отклонения регулируемого значения про- порционально - интегрально - дифференциальный регулятор в исходный период времени производит максимально-возможное влияние на объект ре- гулирования, после этого величина воздействия уменьшается до величины, задаваемой пропорциональной частью, затем приступает к воздействию ин- тегральная часть регулятора. 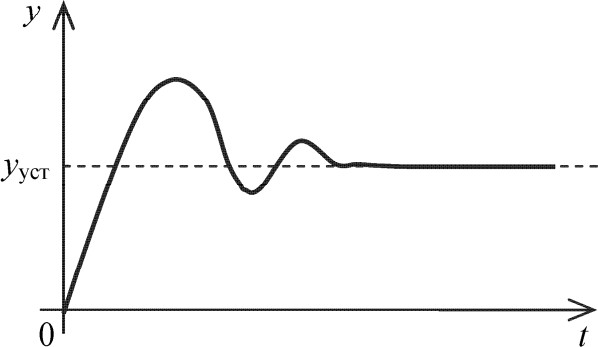 Промежуточный этап в ПИД-регуляторах (рисунок 15) обладает ми- нимальным отклонением по амплитуде и времени, относительно П- и ПИ- регуляторов [4]. Промежуточный этап в ПИД-регуляторах (рисунок 15) обладает ми- нимальным отклонением по амплитуде и времени, относительно П- и ПИ- регуляторов [4].Рис. 15 Процесс прехода в случае ПИД-регулирования Настраиваемыми парамаетрами в ПИД-регуляторе является коэффи- циент пропорциональности регулятора , постоянная, отражающая време- ня интегрирования 𝑇и, и постоянная, характеризующую время дифферен- цирования 𝑇д. В процессе возрастания величины запаздывания в системе, происхо- дит довольно резкое увеличение отрицательных фазовых сдвигов, данный процедура приводит к уменьшению воздействия дифференциальной части регулятора. Из-за присутствия шумов в канале измерения в системе с ПИД - регу- лятором приводит к существенным случайным колебаниям управляющего сигнала регулятора, это приводит к возрастанию средне-квадратической ошибки регулирования и изнашиванию исполнительного устройства. Пропорционально-интегрально-дифференциальные регуляторы обес- печиваю для систем управления температурным режимом относительно высокие показатели регулирования, а именно: несогласованность регулиро- вания составляет меньше чем один процент от заданного значения, доволь- но небольшое время стабилизации и малую чувствительность относительно возмущений извне. Кроме того, необходимо учитывать, что в случае неточного определе- ния параметров, предназначенных для настройки, рассматриваемый регу- лятор оказывает негативное влияние в виде ухудшения работы системы и перехода в автоколебания по сравнению с иными законами регулирования. |