ВКР. Расчетнотеоретический раздел системный анализ
 Скачать 1.96 Mb. Скачать 1.96 Mb.
|

 Введение В настоящее время одним из основных видов транспорта для проведения спасательных операций являются самолеты и вертолеты. С их помощью возможно сокращение время поиска и спасения терпящих бедствия на воде и на земле в труднодоступных местах. Поиск осуществляется с помощью радиолокационной разведки на фоне подстилающей поверхности Для обнаружения с воздуха наземных и морских целей, а так же определения их размеров, дальности и параметров движения применяют бортовые радиоэлектронные станции. Бортовая радиолокационная станция (БРЛС) является одним из самых важных элементов бортового радиоэлектронного оборудования, технические возможности которого во многом определяют эффективность решения задач, возлагаемых на современные вертолеты, осуществляющие спасательные операции. По мнению экспертов БРЛС останутся основным средством поиска целей на фоне различных подстилающих поверхностей. Основными параметрами при поиске целей являются: точность определения координат и разрешающая способность по трем параметрам (по углу места, по азимуту, по дальности). Современные многофункциональные когерентные импульсные РЛС способны работать в режимах обнаружения и сопровождения воздушных и наземных целей, осуществлять картографирование земной поверхности, а также решать вспомогательные задачи: следование рельефу местности, пеленгация радиомаяков. Конструктивно БРЛС состоит из нескольких съемных блоков, расположенных в носовой части вертолета: передатчика, антенного переключателя, приемника, аналого-цифрового преобразователя, процессора обработки сигналов, органов управления и индикации. Целью настоящего дипломного проекта является разработка малогабаритной бортовой РЛС, которая в любую погоду способна обнаруживать терпящих бедствия на фоне различной подстилающей поверхности. РАСЧЕТНО-ТЕОРЕТИЧЕСКИЙ РАЗДЕЛ Системный анализ Анализ потребности Долгое время поиск целей с борта самолета ограничивался условиями оптической видимости. То есть обнаружение целей, посадка самолета затруднялись в темное время суток, а так же из-за возникновения различных метеообразований. Для решения этих проблем были предложены радиолокационные принципы, которые при использовании в бортовой аппаратуре будут обеспечивать посадку летательного аппарата «вслепую», а так же будут осуществлять поиск целей в пространстве независимо от оптического контакта. Одним из основных параметров бортовых РЛС является длина волны излучаемой в пространство, мощность излучения, потребляемая мощность. Первые радиолокаторы работали на длине волны равной 1,5 м, излучаемая мощность достигала значения 30 кВт, а сам комплект аппаратуры весил 95 кг. Длина излучаемой волны влияет на характеристики обнаружения цели в пространстве, увеличение излучаемой мощности улучшает характеристики обнаружения, а именно: повышается вероятность обнаружения целей при заданном уровне ложной тревоги, что, однако, плохо отражается на характеристиках скрытности ЛА, а так же повышает вес и габариты аппаратуры, которые должны соответствовать заданным ограничениям, так как подьемная масса и энергоресурс ЛА жестко регламентирован Бурное развитие авиации предъявляет все более высокие требования к объему, качеству и своевременности информационного обеспечения выполняемых летно-тактических задач, наиболее важную роль в котором играют радиолокационные станции различного назначения, в частности, РЛС обнаружения и сопровождения наземных целей. Развитие радиолокаторов осуществляется по всем направлениям, таким как: повышение рабочей частоты (уменьшение длины волны); снижение потребляемой и излучаемой мощности; уменьшаются габаритные размеры и вес радиолокаторов; переход к антеннам с синтезированной апертурой (антенные фазированные решетки). Одной из основных проблем в настоящее время является отсутствие серийно производимой элементной базы, которая способна работать в миллиметровом диапазоне длин волн (от 10 до 1 мм). В настоящее время большинство радиолокаторов работает в сантиметровом диапазоне длин волн, а конкретно в диапазоне с длиной волны 3 см. Это связано с достаточно широкой номенклатурой серийно производимой элементной базы (волноводы, СВЧ-генераторы и т.п.) данного диапазона. Миллиметровый диапазон длин волн освоен существенно меньше, конечно, существуют радиолокаторы способные работать на частотах от 30 ГГц до 300 ГГц, но элементная база таких радиолокаторов чаще всего изготавливается под заказ. Производимые элементы сложны не только в изготовлении, но так же очень сложны с точки зрения монтажа и эксплуатации, что значительно удорожает производство таких радиолокаторов. Современные РЛС обнаружения и сопровождения являются важным элементом систем поиска и обнаружения наземных целей, типичными представителями которых являются системы: картографирования местности, сканирования пространства; обеспечения безопасности полета. Они позволяют эффективно решать задачи поиска и обнаружения опасных метеообразований, естественных препятствий (горы, скалы) и прочих наземных целей в зоне наблюдения. Так же они осуществляют обработку полученных данных и преобразуют их в вид удобный для человека. Большие информационные возможности современных РЛС предопределяются их высоким техническим уровнем: применением разнообразных видов зондирующих сигналов, возможностью реализации различных режимов работы, использованием различных способов пеленгования, высокими уровнями энергетических потенциалов, применением фазированных антенных решеток и т.д.. Формулировка проблемы В настоящее время существует большое разнообразие бортовых радиолокаторов. В то же время, на основе анализа проблемы и приведенного информационного поиска, можно сделать вывод о том, что наиболее современные из представленных на рынке систем являются продуктами иностранного производства. Бортовых РЛС производимых в России недостаточно, чтобы удовлетворять постоянно растущие потребности к ТТХ бортовых РЛС. Для выполнения условий заданных в конкретном ТЗ найдена только одна бортовая РЛС отечественного производства (НПП «Радар-ммс»), система «Осьминог ПС-32» является украинской разработкой. Таким образом, основной проблемой является проектирование бортовой РЛС отечественной разработки и удовлетворяющей современным требованиям по помехозащищенности и точности обнаружения наземных целей с возможностью оперативного всепогодного обнаружения терпящих бедствия на фоне различной подстилающей поверхности. Системотехническое проектирование Определение параметров зоны обзора РЛС и размеров отражающей поверхности Определим ширину луча в азимутальной плоскости (наиболее важная характеристика луча для данной станции). Так как для получения узкой ДНА необходимо увеличивать размер антенны в соответствующей плоскости, примем  (максимальное значение заданное в ТЗ)[1]: (максимальное значение заданное в ТЗ)[1]:
где  – длина волны, а – длина волны, а  – максимальный линейный размер зеркала в плоскости луча. – максимальный линейный размер зеркала в плоскости луча. По ТЗ задан интервал высот на которых осуществляется обзор земной поверхности, поэтому расчет ширины луча в вертикальной плоскости будет произведен для двух крайних значений интервала. Определим ширину луча ДНА в вертикальной плоскости, которая обеспечит требуемую по ТЗ зону обзора по наклонной дальности без сканирования лучом по углу места, решая простую геометрическую задачу (см. рис. 1.1, 1.2) [4]:  Для высоты H=100 м:        2000 100  1000 Рисунок 1.1 Определение величины для высоты 100 метров
Для высоты H=50 м:    2000 50 1000 Рисунок 1.2 Определение величины для высоты 50 метров
Исходя из полученных значений ширины луча диаграммы направленности в вертикальной плоскости, можно сделать вывод, что  . Таким образом требуемая зона обзора по наклонной дальности, будет обеспечена при ширине луча ДНА . Таким образом требуемая зона обзора по наклонной дальности, будет обеспечена при ширине луча ДНА  (высота 100 м). Для высот ниже 100 м требуемая зона обзора по наклонной дальности будет обеспечена с запасом. (высота 100 м). Для высот ниже 100 м требуемая зона обзора по наклонной дальности будет обеспечена с запасом.Разрешающая способность РЛС по угловым координатам  определяется шириной диаграммы направленности антенны по уровню половинной мощности θ0,5, в соответствующей плоскости. Соответственно, разрешающая способность по азимуту будет определяется шириной диаграммы направленности антенны по уровню половинной мощности θ0,5, в соответствующей плоскости. Соответственно, разрешающая способность по азимуту будет  , а по углу места , а по углу места  [4]. [4].Зная ширину луча в вертикальной плоскости, определим диаметр антенны в вертикальной плоскости из следующего соотношения[1]:
Определение параметров сигнала РЛС Период повторения импульсов (частоту), определим из условия однозначного определения дальности[2]:
Частоту повторения импульсов определим из следующего соотношения[2]:
Следующим параметром, который необходим для расчета мощности излучения, является время облучения цели. Данный параметр представляет собой интервал времени с момента начала облучения цели и окончания прихода от нее сигналов. Для определения времени облучения цели необходимо определить количество элементов разрешения находится в зоне обзора (по трем параметрам: по дальности; по азимуту; по углу места) . В ТЗ не задано значение разрешения по дальности, поэтому выберем разрешение по дальности, исходя из уже реализованных бортовых радиолокаторов, которые используются на практике. Таким устройством является бортовой радиолокатор кругового обзора разработанный предприятием АО «Научно-производственное предприятие «Радар ммс». Данный радиолокатор обеспечивает разрешение по дальности  . Соответственно, для разрабатываемой БРЛС выберем значение разрешения по дальности . [3] . Соответственно, для разрабатываемой БРЛС выберем значение разрешения по дальности . [3]Число элементов разрешения в заданной зоне обзора определяется по следующим соотношениям: по дальности:
по азимуту:
по углу места:
всего элементов разрешения:
Таким образом, зная общее число элементов разрешения, можно определить время облучения цели, используя следующее соотношение[2]:
Зная время облучения цели и период повторения импульсов, можно определить число импульсов в пачке, отраженной от конечной цели, используя следующее соотношение[2]:
Энергетический расчет РЛС Пороговое отношение сигнал/шум связано с вероятностями правильного обнаружения и ложной тревоги следующим соотношением[4]:
где  – вероятность пропуска в одном элементе разрешения – вероятность пропуска в одном элементе разрешенияПри когерентном приеме справедливо равенство:
где  – отношение сигнал/фон в импульсе, а D и F соответствующие вероятности во всем секторе обнаружения – отношение сигнал/фон в импульсе, а D и F соответствующие вероятности во всем секторе обнаруженияОпределим вероятность ложной тревоги в одном элементе разрешения:
Решим уравнение относительно q:
Поскольку обнаружение заданных по ТЗ целей происходит в секторе нижней полусферы на фоне отражений от подстилающей земной поверхности, то отношение сигнал/фон определяется по следующему соотношению:
где  – удельная ЭПР подстилающей поверхности типа лесотундра (-12 дБ); – удельная ЭПР подстилающей поверхности типа лесотундра (-12 дБ);  – ЭПР цели (примем – ЭПР цели (примем  , так как по ТЗ , так как по ТЗ  ); );  – площадь элемента разрешения (площадка). – площадь элемента разрешения (площадка).Зная требуемое значение отношения сигнал/шум вычисленное для помехи в виде собственных шумов приемника, определим, какой должна быть разрешающая способность по дальности, чтобы отношение сигнал/фон не превышало ранее определенное, обеспечивающее заданные в ТЗ вероятности обнаружения[2]: Из (17) выразим значение  : :
Согласно формуле (1.18) разрешение по дальности  и ориентировочное значение было принято равным и ориентировочное значение было принято равным  , следовательно, расчеты совпадают и дополнительных итераций по корректированию значения , следовательно, расчеты совпадают и дополнительных итераций по корректированию значения  не требуется. не требуется.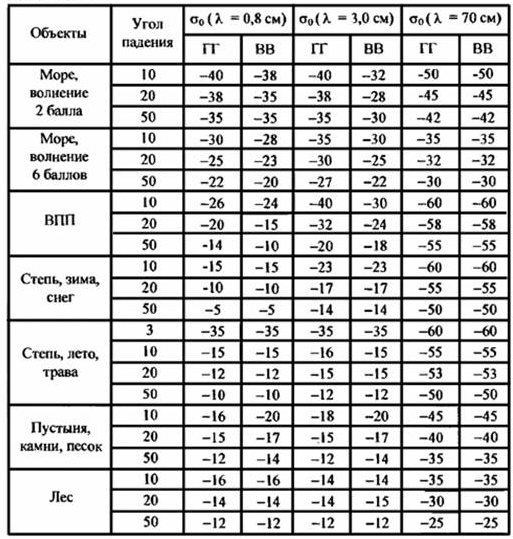 Рисунок 1.3. Характеристики удельной ЭПР земной и водной поверхностейНа волне  и частоте и частоте  , при использовании в качестве усилителя высокой частоты лампы бегущей волны можно получить , при использовании в качестве усилителя высокой частоты лампы бегущей волны можно получить  (см. рисунок 1.4, кривая А)[1]. (см. рисунок 1.4, кривая А)[1].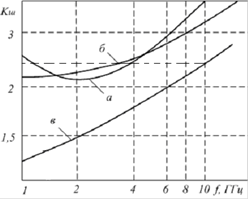 Рисунок 1.4. Зависимость коэффициента шума от частоты принимаемого сигнала: а – для ламп бегущей волны; б – для усилителей на туннельных диодах; в – для параметрических усилителей. Определим спектральную плотность мощности шума:
где k – постоянная Больцмана,  – нормальная температура в Кельвинах – нормальная температура в Кельвинах Определим пороговую энергию принимаемого сигнала при коэффициенте потерь ξ=10 дБ (  ): ):
Прежде чем определить энергию зондированного сигнала, определим коэффициент усиления антенны:
где  – КПД антенны. – КПД антенны. Определим потери при распространении в условиях дождя интенсивностью до 3 мм/час (см. рисунок 1.5, кривая № 7)[4]:
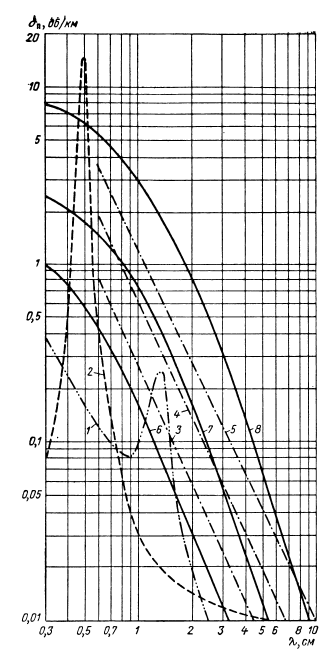 Рисунок 1.5. Затухание радиоволн в атмосфере Требуемая энергия зондированного сигнала[2]:
Определим требуемую длительность импульса, обеспечивающую заданное разрешение по дальности [2]:
Определим требуемую импульсную мощность передатчика[2]:
Так как максимально допустимая мощность передатчика  , определим длительность излучаемого импульса обеспечивающего требуемую энергию излучения[2]: , определим длительность излучаемого импульса обеспечивающего требуемую энергию излучения[2]:
Для сохранения требуемой разрешающей способности по дальности будем использовать сложный сигнал с коэффициентом сжатия[4]:
Таким образом необходимо применение составного сложного сигнала. При этом минимальная дальность определяется по следующему выражению[2]:
Полученное значение  удовлетворяет условию заданному в ТЗ. удовлетворяет условию заданному в ТЗ. |