Котик. Сборник задач по использованию радиолокатора для предупреждения столкновений судов
 Скачать 1.16 Mb. Скачать 1.16 Mb.
|

|
Сборник задач по использованию радиолокатора для предупреждения столкновений судов. Баранов Ю. К., Л е с-ков М. М., Кубачев Н. А., Кургузо в С. С. Изд. 3-е, перераб. и доп. М., «Транспорт», 1978, 96 с. В сборнике приведены задачи по определению обстоятельств встречи и элементов движения других судов, выбору маневра по расхождению с ними, учету инерции я циркуляции судна, а также задачи по безопасности мореплавания, которые позволят судоводителю освоить технику решения задач по использованию радиолокатора поя расхождении с другими судами в конкретных условиях. В связи с возросшими скоростями и водоизмещением современных судов большое внимание уделено учету их инерционных характеристик. Для облегчения самостоятелыиоа работы в сборнике дано теоретическое обоснование способов решения задач по использованию радиолокационных станций для предупреждения столкновений судов в море; приведены конкретные схемы (примеры) решения типовых задач. В конце книги имеются ответы на задачи. третье издание сборника значительно переработано по сравнению е предыдущими изданиями и дополнено новыми задачами. Книга предназначена для учащихся судоводительских факультетов высших инженерных морских училищ. Она может быть использована также учащимися мореходных училищ, на курсах усовершенствования командного состава морского флота и судоводителями. Ил. 45. Издательство «Транспорт», 1978 СОКРАЩЕНИЯ, ПРИНЯТЫЕ В ТЕКСТЕ ИКн — истинный курс судна-наблюдателя (нашего судна). ИКв— истинный курс другого судна. Ко — отиосительяый курс другого судна. Vд—истинная скорость судна-наблюдателя (нашего судна)-. Vв — истинная скорость другого судна. Vo — относительная скорость другого оудна. Vп — скорость полного хода. Vt — текущее значение скорости. Vдр — средняя скорость нашего судна от точки начала ман^п- ра до точки кратчайшего сближения. Sн — плавание нашего .судна. Sв — плавание другого судна. So — относительное перемещение другого судна. Sп — длина тормозного пути гари скорости полного хода. Sv — длина тормозного пути при скорости V. а—раcстояние, гарантирующее обнаружение неблагоприятного маневра наблюдаемого судна. D — расстояние до объекта наблюдений. Dкр — расстояние кратчайшего сближения судов. Dпep — расстояние, на котором другое судно пересекает курс судна-наблюдателя. dm — расстояние, на котором начинается маие&р. Dзад—заданное расстояние кратчайшего обложения. Т — судовое время наблюдений. Tкр — судовое время сближения на кратчайшее расстояние. Тпер — судовое время пересечения другим судном курса судна-наблюдателя. Тм — судовое время начала маневра. t — время плавания на каком-либо участке пути. tкр — промежуток времени от момента начала маяевра до момента сближения на кратчайшее расстояние. tм — время до начала маневра. tv — инерционная характеристика судна. ИП — йстинный пеленг. ПУ — путь судна (путевой угол). q(КУ) —курсовой угол. Rц — радиус циркуляции. T180—время поворота на 180°. r — ракурс другого судна. Rо.з - радиус зоны опасного сближения. ВВЕДЕНИЕ Радиолокационные станции (РЛС) на судах морского торгового флота уже давно завоевали признание судоводителей. Возможность обнаружения с помощью РЛС надводных объектов, в том числе судов, позволила использовать радиолокаторы как средство для расхождения судов в условиях пониженной ВИДИМОСТИ. На первых порах, пока РЛС были оборудованы только некоторые, главным образом, быстроходные пассажирские суда, особых затруднений при расхождении не возникало, так как суда с радиолокаторами могли предпринимать любой маневр заранее, не опасаясь, что встречное судно их видит и тоже будет предпринимать маневр. Однако, когда число судовых РЛС возросло, стали возникать трудности при расхождении, приводившие иногда к тяжелым столкновениям (например, столкновения судов «Стокгольм»—«Андреа Дориа», «Майкоп»—«Передовик» и др.). Анализ работы судоводителей, раэбор аварий показали, что успешное применение радиолокатора при расхождении судов в значительной степени зависит от его умелого и правильного ис-пользования. Поэтому возникла необходимость в обучения штурманов основам использования РЛС для расхождения, что предуомо-трено программами подготовки судоводителей в морских училищах или на специальных курсах повышения квалификации. На основании теоретичестах исследований, миогочисленных конференций, дискуссий в печати, проведенных в вашей стране и за рубежом, были выработаны международные рекомендации по использованию РЛС в качестве средства для предупреждения столкновений судов. Впервые такие рекомендации были приняты на Международной конференции в Лондоне в I960 г. в виде .приложения к тексту ППСС и некоторых дополнений в самом тексте. Усиление роли радиолокатора для безопасности плавания получило еще большее отражение в МППСС-72, вступивших в действие с 1977 г. В связи с этим все больше совершенствуются и методы обработки и представления радиолокационной информации, Глава II ВЫБОР МАНЕВРА ПО РАСХОЖДЕНИЮ С ДРУГИМИ СУДАМИ § 5. ПОЯСНЕНИЯ Любое судно, предпринимающее при любых условиях видимости маневр для предупреждения столкновения или чрезмерного сближения с другими судами, должно руководствоваться требованиями Правила 8 — Действия для предупреждения столкновения (МППСС—72). Положения этого Правила распространяются на все правила, регламентирующие взаимные обязанности судов при расхождении. Поскольку основная роль радиолокатора—обеспечить безопасность плавания судов при ограниченной видимости, в первую очередь следует обратить внимание при выборе маневра на требования Правила 19— Плавание судов при ограниченной видимости. При выборе маневра необходимо учитывать то, что он не должен 'быть противоположным маневру, который обычно предпринимает судоводитель для расхождения с другими судами при входе в визуальный контакт. В противном случае внезапное улучшение видимости может поставить судоводителя в трудное положение. 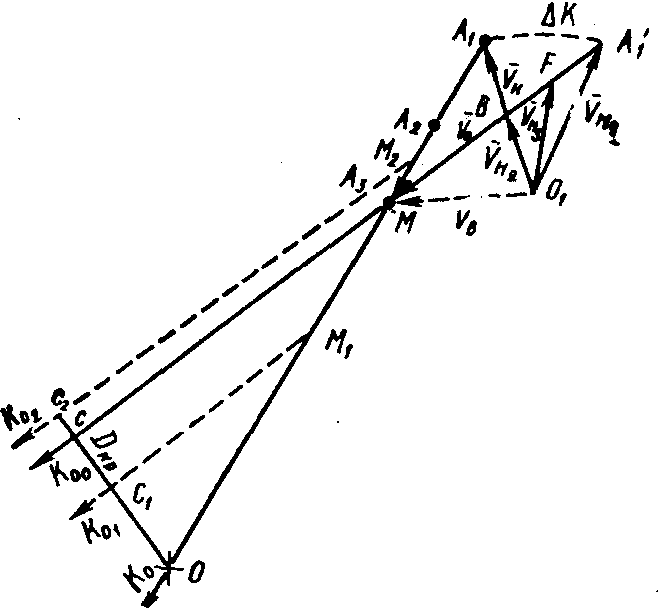 В данной главе предлагаются для решения конкретные задачи на расхождение с другими судами м'аневром изменения курса, скорости или одновременным изменением курса и скорости. В ряде задач требуется определить судовое время, в которое судно-наблюдатель сможет лечь на прежний курс и не сближаться при этом с наблюдаемым судном ближе заданного расстояния кратчайшего сближения. Приведем краткие пояснения техники выбора мз-невра и решения задач на маневренном планшете. Рис. 11 Рассмотрим технику выбора маневра (рис. 11). Пусть относительный курс наблюдаемого судна Ко уже определен по точкам А1 и А2 ;. проходит, в данном случае, через центр планшета О, т. е. существует угроза столкновения. Предположим, что судну-наблюдателю необходимо произвести такой маневра чтобы суда разошлись левыми бортами на безопасном расстоя- ним dkp = ОС, считая элемента движения наблюдаемого судна неизменными. Это означает, что новый относительный курс наблюдаемого судна после выполнения .маневра должен проходить левее центра планшета на расстоянии dkp = ОС. Учитывая время, требуемое на расчеты и выполнение маневра, необходимо иа первоначальном относительном курсе Ко на-метить точку начала маневра М (она будет соответствовать положению наблюдаемого судна Аз в момент маневра) и на рас-стоянми dkp = ОС от центра планшета провести из нее новый относительный курс К0о. Для ускорения и единообразия решения задачи, что имеет немаловажное 'практическое значение, можно рекомендовать следующий порядок действий. Определив по двум точкам А1 и А2 (или по послесвечению), что относительный курс проходит опасно, к точке А1 строим вектор нашей скорости Vц в масштабе 1 : 10 (вектор движения за 6 мин). Интервал между наблюдениями, если позволяют обстоятельства ситуации, удобно брать равным 3 мин. Точка М (Аз) в этом случае наносится через 6 мин относительно точки A1. Естественно, что и вектор относительной скорости Vo будет, построен в масштабе 1 : 10. При такой методике построения сразу же, без дополнительных вычислений или использования логарифмической шкалы, легко определить 'по сетке маневренного планшета или на глаз, сравнением с величиной вектора нашей скорости истинную vb и относительную Vo скорости наблюдаемого судна. Имея треугольник скоростей О1МА1 и новый относительный курс Ко, задачу выбора необходимого маневра сводят к построению нового треугольника скоростей, имеющего с первоначальным общую сторону 01М (по условию .курс и скорость наблюдаемого судна постоянны). Направление вектора новой относительной скорости Vo известно: вектор направлен по новому относительному курсу К0о,. Поскольку по стороне и углу можно построить бесчисленное множество треугольников, то, естественно, и решение задачи будет многозначным. Рассмотрим основные варианты. Маневр изменением курса. В этом случае задача сводится к построению треугольника по двум сторонам и противолежащему углу. Угол отворота определится, если из точки 01 (см. рис. 11) на линии нового.относительного курса К0о. сделать засечку радиусом вектора скорости судна-наблюдателя Vн. Тогда направление нового вектора нашей скорости Vн1, (01А'1) определит истинный курс судна-наблюдателя после поворота вправо, а угол А К будет равен углу отворота. Вторая точка пересечения окружности радиуса Vн с продолжением линии нового относительного курса К0о,., укажет решение задачи отворотом влево. Если окружность радиуса Vн с центром в точке о1 не пере- секает линии нового относительного курса, это указывает на невозможность расхождения на заданном расстоянии только изменением курса. Маневр изменением скорости. Для расхождения на Dкр = ОС новый треугольник скоростей 01МВ уже имеется. Новый век-тар скорости судна-наблюдателя Vн2, в выбранном ранее масштабе, равен величине отрезка 01В. Совместное изменение курса и скорости. Если выбрать любую точку на новом относительном курсе К0о в интервале от В до А'1, то получится новый треугольник скоростей, обеспечивающий расхождение судов 'на заданном расстоянии изменением курса вправо с одновременным уменьшением скорости. Например, если по каким-либо причинам для расхождения на заданном расстоянии можно изменить курс только до направления вектора Vн3,, то необходимо уменьшить вектор нашей скорости до величины 01F. Область левее точки В на новом относительном курсе будет соответствовать повороту влево. Решая обратную задачу, т. е. произвольно меняя курс или скорость или одновременно и курс и скорость, мы можем определять расстояние кратчайшего сближения, на котором разойдутся суда. Если маневр будет выполнен не в точке М, а, например, в точке М1 или М2. то, проведя из этих точек линии, параллельные линии К0о, , мы получим, соответственно, новые линии относительных курсов Ко1, или Ко2, и новые расстояния кратчайшего сближения OC1 или ОС2. При решении задач данной главы предполагается, что возможные ошибки определения Dкp учтены при назначении заданной дистанции расхождения Dзад.
Пример 4. Судно следует ИКн= =330° со скоростью Vн=20 уз. Обнаружив эхо-сигнал другого судна, измерили на него пеленги и дистанции в фиксированные моменты временя: Принимая, в данном случае, безопасное расстояние Dкр = = 2 милям и время начала маневра 02.06, определить: 1) угол отворота вправо, ИКн1,, tкр при маневре только изменением курса; 2) новую скорость vh1 и tкp при маневре только скоростью; 3) угол отворота вправо, ИКн1, и tкр, если одновременно скорость уменьшили до 8,5 уз Решение (рис. 12). Наносим местоположение наблюдаемого судна в 02.00 и 02, 03 на планшет; намечаем на линии относительного курса Ко точку начала .маневра в 02.06; к началу вектора относительной скорости Vo строим вектор нашей скорости Vн (в масштабе 1 : 10); через точку 02.06 проводим новый относительный курс в dkp = 2 милям. Маневр изменением курса (рис. 12,а): делаем засечку вектором скорости на линии нового относительного курса Ко1, разворотом вправо. Ответ: А К = 74° (ИКн1, = 44°); tкр = 5 мин. Маневр изменением скорости (рис. 12,6): измеряем величину вектора Vн, и рассчитываем tкр. Ответ: Vн1= 12 уз; tкр = 15 мин. Маневр одновременным изменением курса и скорости (рис. 12,в): уменьшенным до 8,5 уз векторам Vн1 делаем засечку на новом относительном курсе справа и рассчитываем tкр. Ответ: А К = 63° (ИКн1 = 33°); tкр = 6 мин. Учет маневра другого судна. Выбирая маневр по расхождению с другими судами, конечно, никогда нельзя быть уверенным, что другое судно само не предпримет какого-либо маневра, а будет следовать постоянным курсом и постоянной скоростью. Поэтому, выбрав маневр в предположении постоянства элементов движения другого судна, после его выполнения необходимо тщательно наблюдать за эхо-сигналом этого судна до тех пор, пока суда не разойдутся. Неблагоприятный маневр другого судна приведет к уменьшению расстояния кратчайшего сближения, а в некоторых случаях может свести на нет предпринятые нами действия. Поэтому судоводитель должен уметь при решении задачи учитывать влияние маневра другого судна на изменение обстоятельства встречи. Если в процессе расхождения могут быть сделаны предположения о возможном .маневре наблюдаемого судна, то этот предполагаемый маневр может быть учтен при .выборе маневра судна-наблюдателя. В этом случае новый векторный треугольник скоростей строится у измененного вектора скорости наблюдаемого судна vb1, Схема построения п.ри выборе маневра судна-наблюдателя с учетом предполагаемого маневра другого судна показана на рис. 39 к задаче 186. Возвращение к прежним элементам движения. С выбором и осуществлением маневра процесс расхождения с другим судном нe заканчивается. Судоводитель должен тщательно контролировать эффективность предпринятого маневра. Если по-следующая радиолокационная прокладка показала, что Dкр < D зад, следует, исходя из обстоятельств данного случая, пред принять дополнительный маневр, a ecли необходимо предотвра-тить столкновение или иметь больше времени для оценки ситу-ации, то в соответствии с Правилом 8(e) — уменьшить ход или остановитьcя, застопорив машины или дав задний ход. 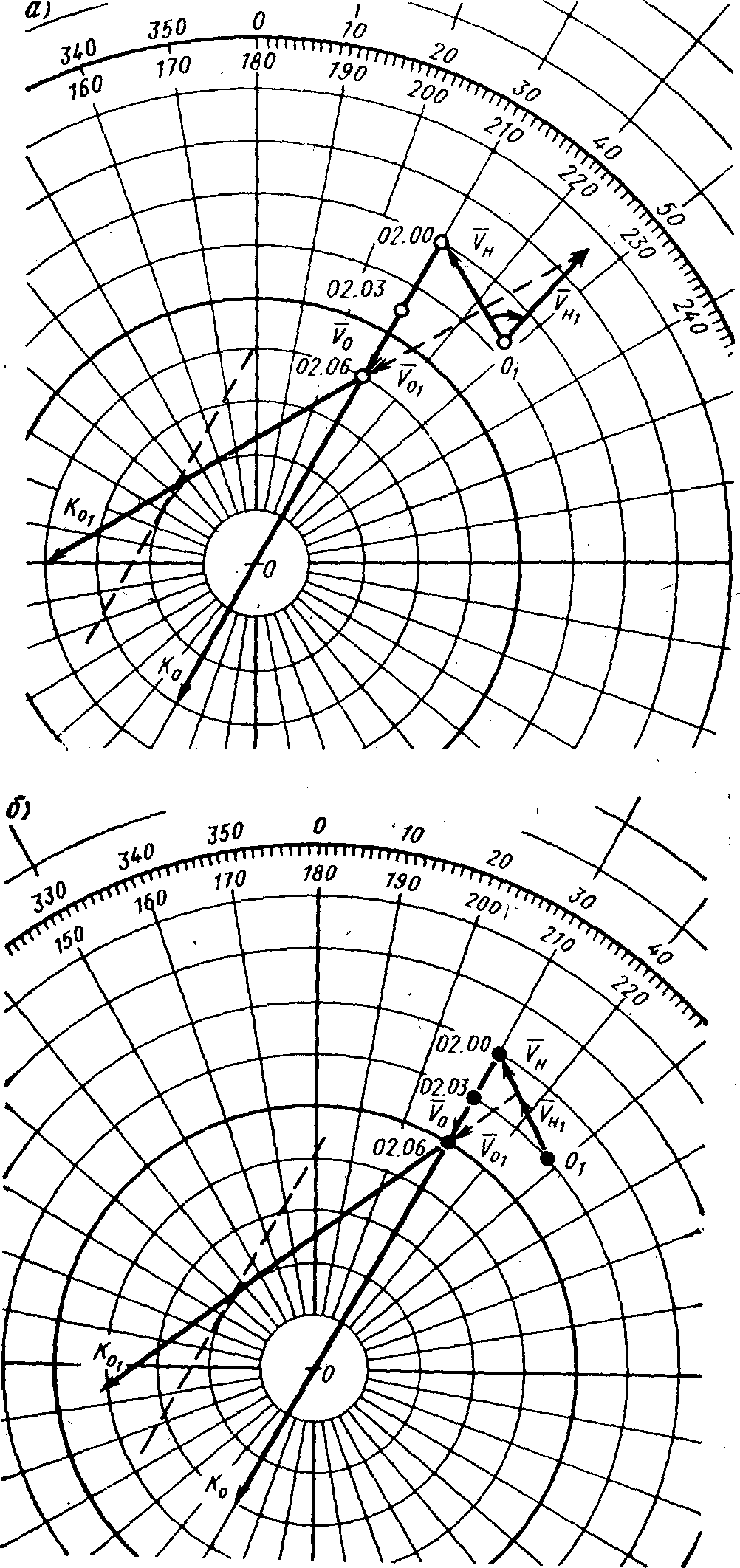 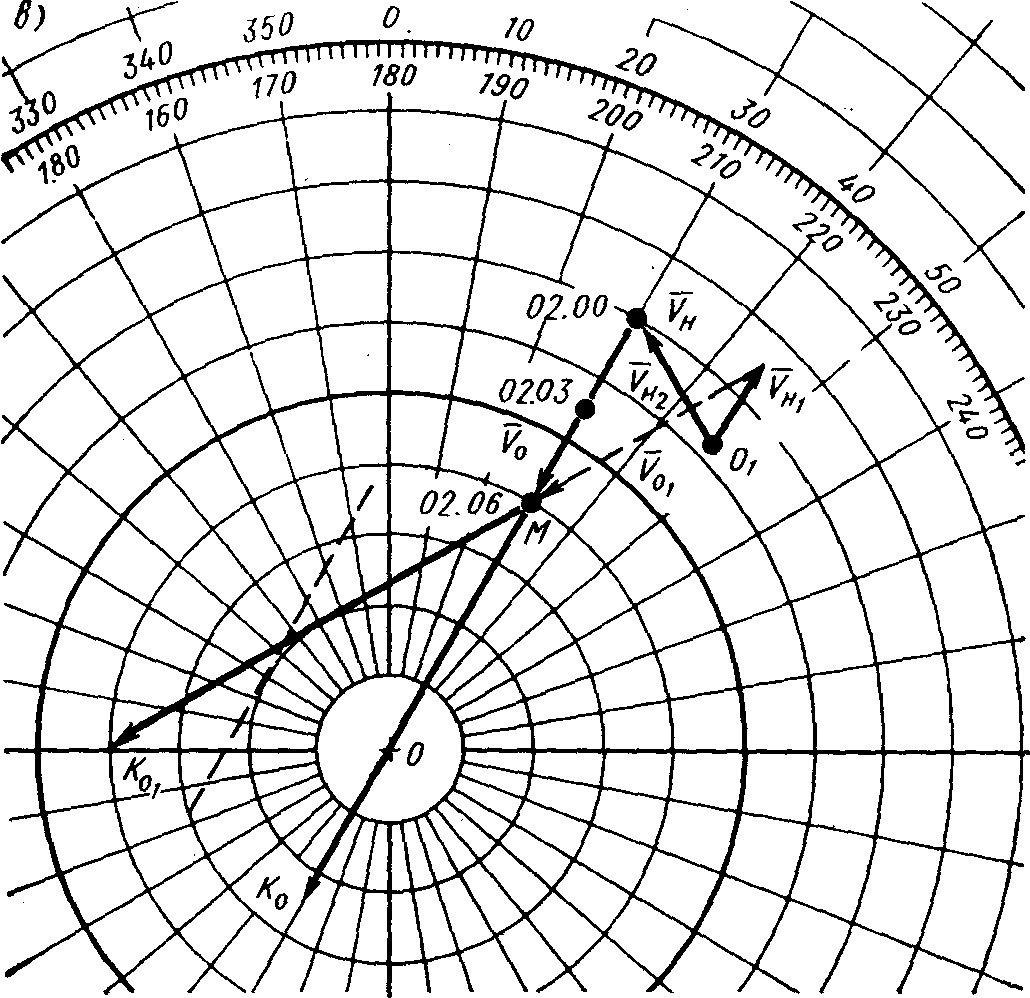 Рис. 12 Если последующая радиолокационная прокладка показала, что в результате предпринятого маневра судна-наблюдателя (или маневра судна-наблюдателя и другого судна) Dкр >=Dзад, судоводитель должен оценить возможность возвращения своего судна к прежним элементам движения. Для этого рекомендуется провести касательную к заданной дистанции расхождения, параллельную относительному курсу наблюдаемого судна Ко до предпринятого .нами маневра (на рис. 12 эта линия показана пунктиром). После .пересечения эхо-сигналом этой линии судно-наблюдатель .может вернуться к прежним элементам движения, не сближаясь при этом с другим суднам ближе Dзад-После возвращения к прежним элементам движения радиолокационную прокладку ведут до тех пор, пока другое судно не будет оставлено позади. Маневр расхождения с несколькими судами. Если на экране индикатора наблюдаются эхо-cигналы нескольких судов, то при выборе маневра для расхождения с наиболее опасным судном необходимо принимать во внимание суда, ситуация сближения с которыми может ухудшиться в результате маневра. 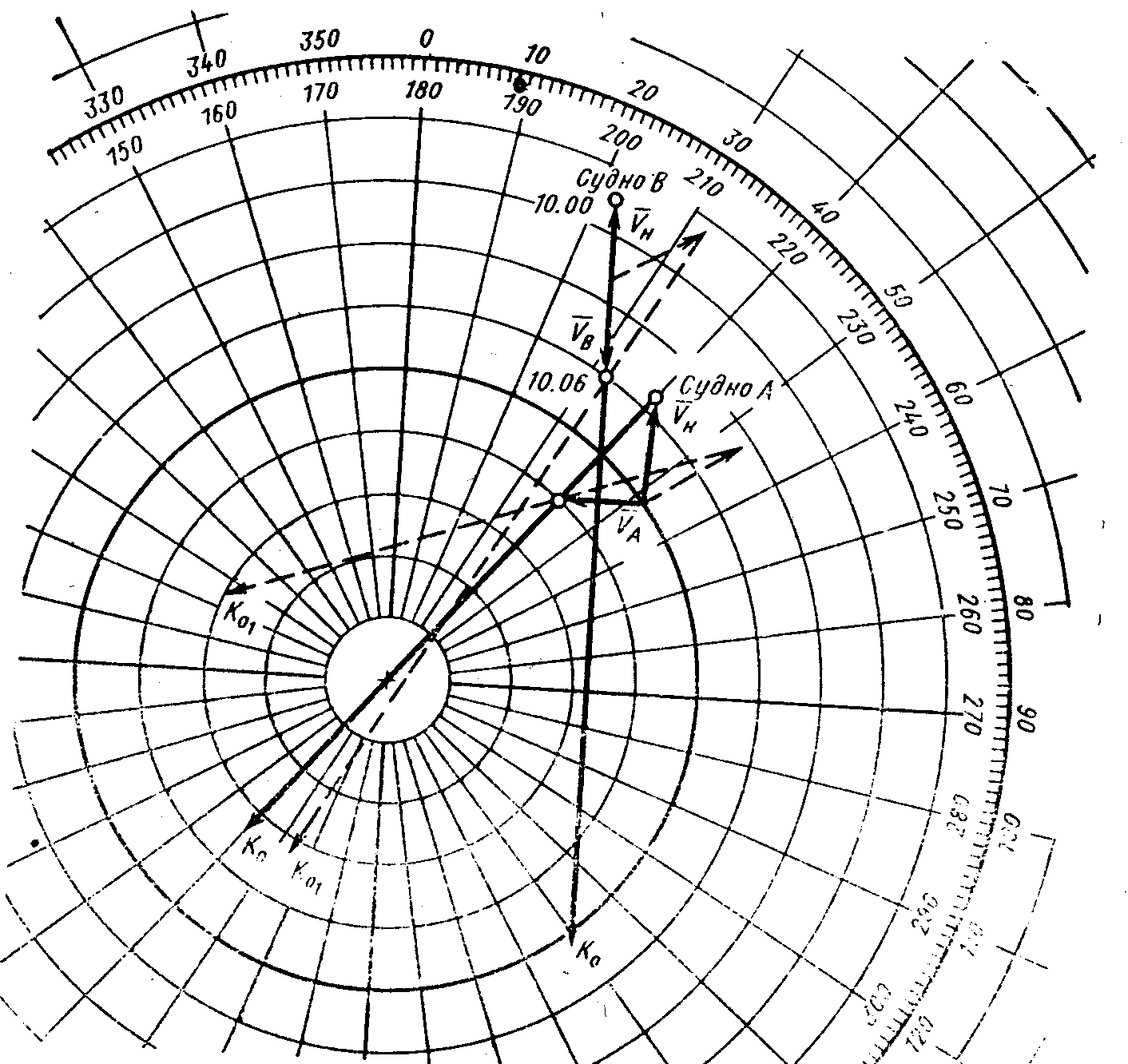 Рис. 13 Например, оценивая обстоятельства встречи с двумя судами (рис. 13), видим, что разойтись с опасным судном А можно как отворотом вправо, так и уменьшением скорости. Однако, разворачивая вправо вектор Vн в треугольнике скоростей судна В, убеждаемся, что при нашем повороте вправо судно В становится опасным (показано пунктиром). В данном случае, по-видимому, целесообразнее выбрать маневр уменьшением скорости, который ведет к расхождению с судном А и не ухудшает ситуацию сближения с судном В. При достаточном навыке дополнительные графические построения в треугольнике скоростей судна В не производятся, а тенденция изменения относительного курса оценивается на глаз. Такая оценка позволяет из большого количества наблюдаемых судов выбрать те суда, которые могут быть опасны при выборе маневра. Например, в ситуации на рис. 14 нетрудно убедиться, что наиболее, логичным маневрам для расхождения с судном А является отворот вправо; при этом дистанция расхождения с судном В и С увеличится,а дистанция расхождения с судном D уменьшится. В этом случае необходимо решать задачу расхождения одновременно с судами А и D. Проведя новый относительный курс судна А КоА. и сделав на нем засечку своей скоростью, находим угол отворота вправо а. Развернув на такой же угол вектор своей скорости в треугольнике скоростей судна D, убеждаемся, что с судном D расходимся безопасно. При малом расстоянии между относительными курсами судов А и D в подобной же ситуации решается задача по расхождению с одним судном — судном D — левыми бортами. При расхождении с судами рекомендуется следующая последовательность действий. 1. Нанести первые позиции судов и построить векторы скорости судна-наблюдателя в масштабе 1 : 10 (векторы движения за 6 мин). 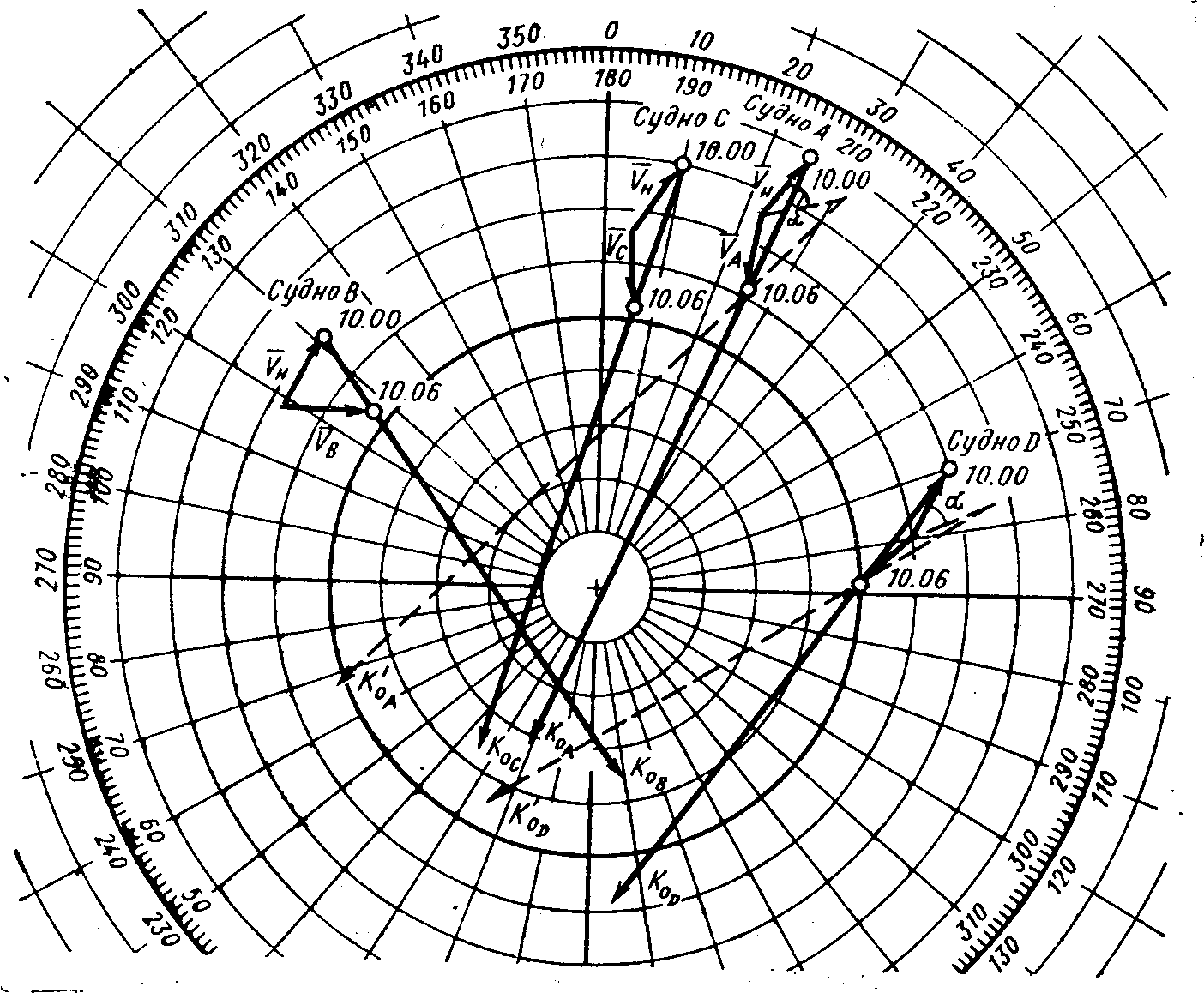 Рис. 14 2. Нанести вторые (если позволяет обстановка, то и третьи) позиции судов (удобнее через интервал времени, кратный 3 мин); нанести экстраполированные (или интерполированные) точки на 6 мин; построить векторы наблюдаемых судов. 3. Проанализировать ситуации сближения; выбрать вид маневра (поворот вправо, влево, изменение скорости), а также суда, наиболее опасные при данном маневре. 4. Уточнить маневр (на сколько градусов поворачивать, какой дать ход); построить новые векторные треугольники и относительные курсы. 5. Выполнить маневр. 6. Проконтролировать эффективность маневра. Использование палетки. Капитан дальнего плавания Н. Я. Брызгин для выбора маневра по расхождению с несколькими судами предложил использовать специальную палетку, представляющую собой лист прозрачного материала с нанесенными двумя взаимно перпендикулярными линиями, пересекающимися в точке О (рис. 15). В основе использования палетки лежит метод одновременного рассмотрения нескольких векторных треугольников. Пусть линии относительных курсов обнаруженных на экране судов В и С уже нанесены на планшет и проходят слишком близко к центру планшета. Для выбора маневра, обеспечивающего расхождение с этими судами на расстоянии не ближе 2 миль (рис. 15,а), намечаем точки начала маневра (09.12). Из центра планшета .проводим вектор скорости судна-наблюдателя в масштабе за 6 мин. Наложив на планшет палетку так, чтобы точка О совпала с концом вектора скорости судна-наблюдателя, а линии палетки были параллельны направлениям О—180° и 90—270°, переносим на нее точки С1 и b1 (положение эхо-сигналов 09.06). Если теперь перемещать палетку в любое положение, сохраняя все время ориентацию относительно планшета, то будем получать новые линии относительных курсов судов В и С, расположемные по направлению прямых, Проходящих через точки В'1 и С'1 на палетке и точки начала маневра на планшете. Для каждого положения прямая, проходящая из центра планшета к перекрестью на палетке, представит новый вектор скорости нашего судна. Перемещая палетку по окружности, проходящей через конец вектора нашей скорости, мы можем найти маневр изменением курса; перемещая палетку вдоль вектора скорости,—маневр изменением скорости; помещая перекрестие в любую точку внутри окружности вектора скорости, можно найти совместный маневр изменением курса с одновременным уменьшением скорости. После выбора маневра точки В'1 и. С'1 можно уколом циркуля перенести на планшет. 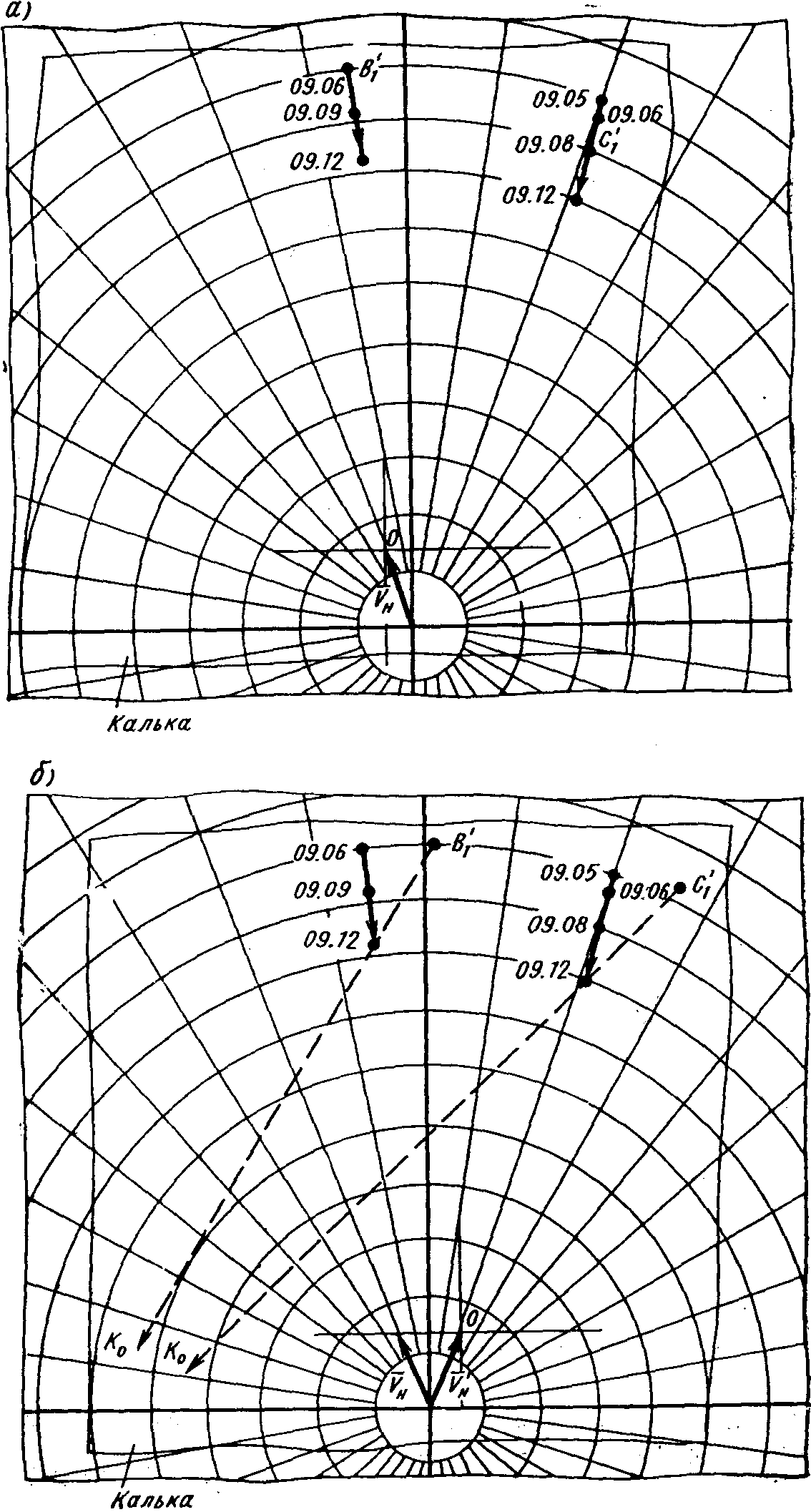 Рис. 15 В данном случае (рис. 15,а) выбран маневр изменением курса, обеспечивающий расхождение с обоими судами на расстоянии более 2 миль (рис. 15,б). |