Simulink Инструмент моделирования динамических систем
 Скачать 2.28 Mb. Скачать 2.28 Mb.
|

|
Font — Форматирование шрифта надписей и текстовых блоков. Text alignment — Выравнивание текста в текстовых надписях. Flip name — Перемещение подписи блока. Show/Hide name — Отображение или скрытие подписи блока. 2.Изменение цветов отображения блоков:
3. Изменение положения блока и его вида:
4. Прочие установки:
7. Установка параметров расчета и его выполнение Перед выполнением расчетов необходимо предварительно задать параметры расчета. Задание параметров расчета выполняется в панели управления меню Simulation/Parameters. Вид панели управления приведен на Рис.7.1. 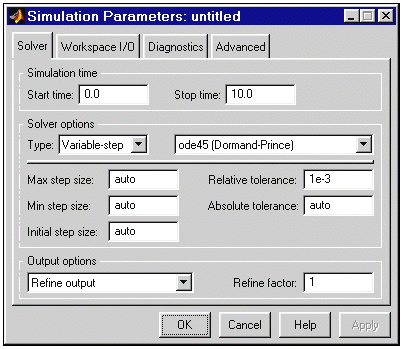 Рис 7.1. Панель управления Окно настройки параметров расчета имеет 4 вкладки:
Установка параметров расчета модели выполняется с помощью элементов управления, размещенных на вкладке Solver. Эти элементы разделены на три группы (рис. 7.1): Simulation time (Интервал моделирования или, иными словами, время расчета), Solver options (Параметры расчета), Output options (Параметры вывода). 7.1. Установка параметров расчета модели 7.1.1. Simulation time (Интервал моделирования или время расчета) Время расчета задается указанием начального (Start time) и конечного (Stop time) значений времени расчета. Начальное время, как правило, задается равным нулю. Величина конечного времени задается пользователем исходя из условий решаемой задачи. 7.1.2. Solver options (Параметры расчета) При выборе параметров расчета необходимо указать способ моделирования (Type) и метод расчета нового состояния системы. Для параметра Type доступны два варианта - c фиксированным (Fixed-step) или с переменным (Variable-step) шагом. Как правило, Variable-step используется для моделирования непрерывных систем, a Fixed-step - для дискретных. Список методов расчета нового состояния системы содержит несколько вариантов. Первый вариант (discrete) используется для расчета дискретных систем. Остальные методы используются для расчета непрерывных систем. Эти методы различны для переменного (Variable-step) и для фиксированного (Fixed-step) шага времени, но, по сути, представляют собой процедуры решения систем дифференциальных уравнений. Подробное описание каждого из методов расчета состояний системы приведено во встроенной справочной системе MATLAB. Ниже двух раскрывающихся списков Type находится область, содержимое которой меняется зависимости от выбранного способа изменения модельного времени. При выборе Fixed-step в данной области появляется текстовое поле Fixed-step size (величина фиксированного шага) позволяющее указывать величину шага моделирования (см. рис. 7.2). Величина шага моделирования по умолчанию устанавливается системой автоматически (auto). Требуемая величина шага может быть введена вместо значения auto либо в форме числа, либо в виде вычисляемого выражения (то же самое относится и ко всем параметрам устанавливаемым системой автоматически). 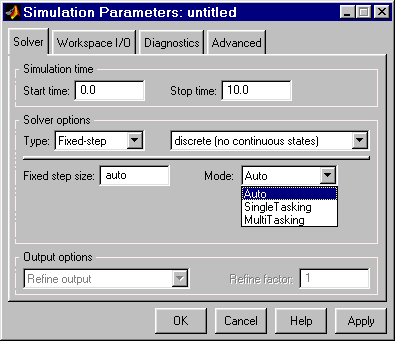 Рис 7.2. Вкладка Solver при выборе фиксированного шага расчета При выборе Fixed-step необходимо также задать режим расчета (Mode). Для параметра Mode доступны три варианта:
При выборе Variable-step в области появляются поля для установки трех параметров:
При моделировании непрерывных систем с использованием переменного шага необходимо указать точность вычислений: относительную (Relative tolerance) и абсолютную (Absolute tolerance). По умолчанию они равны соответственно 10-3 и auto. 7.1.3. Output options (Параметры вывода) В нижней части вкладки Solver задаются настройки параметров вывода выходных сигналов моделируемой системы (Output options). Для данного параметра возможен выбор одного из трех вариантов:
7.2. Установка параметров обмена с рабочей областью Элементы, позволяющие управлять вводом и выводом в рабочую область MATLAB промежуточных данных и результатов моделирования, расположены на вкладке Workspace I/O (рис. 7.3). 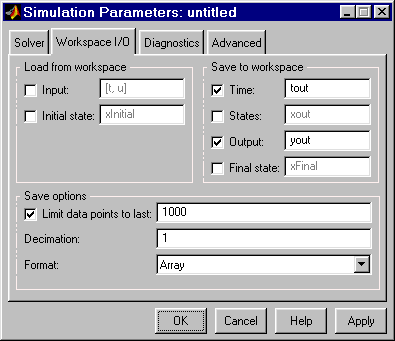 Рис 7.3. Вкладка Workspace I/O диалогового окна установки параметров моделирования Элементы вкладки разделены на 3 поля:
7.3. Установка параметров диагностирования модели Вкладка Diagnostics (рис. 7.4) позволяет изменять перечень диагностических сообщений, выводимых Simulink в командном окне MATLAB, а также устанавливать дополнительные параметры диагностики модели. Сообщения об ошибках или проблемных ситуациях, обнаруженных Simulink в ходе моделирования и требующих вмешательства разработчика выводятся в командном окне MATLAB. Исходный перечень таких ситуаций и вид реакции на них приведен в списке на вкладке Diagnostics. Разработчик может указать вид реакции на каждое из них, используя группу переключателей в поле Action (они становятся доступны, если в списке выбрано одно из событий):
Выбранный вид реакции отображается в списке рядом с наименованием события. 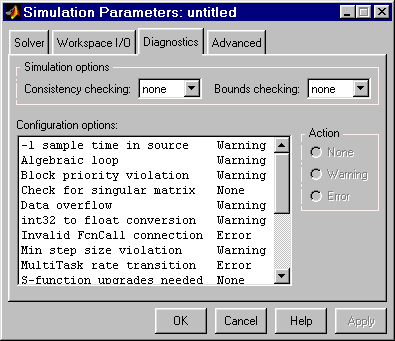 Рис 7.4. Вкладка Diagnostics окна установки параметров моделирования 7.4. Выполнение расчета Запуск расчета выполняется с помощью выбора пункта меню Simulation/Start. или инструмента 9. Библиотека блоков Simulink 9.1. Sources - источники сигналов 9.1.1. Источник постоянного сигнала Constant Назначение: Задает постоянный по уровню сигнал. Параметры: 1. Constant value - Постоянная величина. 2. Interpret vector parameters as 1-D – Интерпретировать вектор параметров как одномерный (при установленном флажке). Данный параметр встречается у большинства блоков библиотеки Simulink. В дальнейшем он рассматриваться не будет. Значение константы может быть действительным или комплексным числом, вычисляемым выражением, вектором или матрицей. Рис. 9.1.1 иллюстрирует применение этого источника и измерение его выходного сигнала с помощью цифрового индикатора Display. 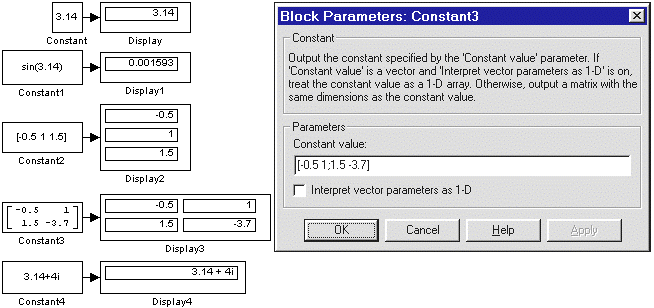 Рис. 9.1.1. Источник постоянного воздействия Constant 9.1.2. Источник синусоидального сигнала Sine Wave Назначение: Формирует синусоидальный сигнал с заданной частотой, амплитудой, фазой и смещением. Для формирования выходного сигнала блоком могут использоваться два алгоритма. Вид алгоритма определяется параметром Sine Type (способ формирования сигнала):
9.1.2.1. Формирование выходного сигнала по текущему значению времени для непрерывных систем Выходной сигнал источника в этом режиме соответствует выражению: y = Amplitude* sin(frequency* time + phase) + bias. Параметры:
При расчетах для очень больших значений времени точность расчета выходных значений сигнала падает вследствие значительной ошибки округления. 9.1.2.2. Формирование выходного сигнала по текущему значению времени для дискретных систем Алгоритм определения значения выходного сигнала источника для каждого последующего шага расчета определяется выражением (в матричной форме): где t – постоянная величина, равная значению Sample time. В данном режиме ошибка округления для больших значений времени также уменьшает точность расчета. 9.1.2.3. Формирование выходного сигнала по величине модельного времени и количеству расчетных шагов на один период Выходной сигнал источника в этом режиме соответствует выражению: y= Amplitude* sin[(k + Number of offset samples) / Samples per period] + bias , где k – номер текущего шага расчета. Параметры:
В данном режиме ошибка округления не накапливается, поскольку Simulink начинает отсчет номера текущего шага с нуля для каждого периода. На Рис. 9.1.2 показано применение блока с разными значениями шага модельного времени (Sample time = 0 для блока Sine Wave 1и Sample time = 0.1 для блока Sine Wave 2). Для отображения графиков выходных сигналов в модели использован виртуальный осциллограф (Scope). 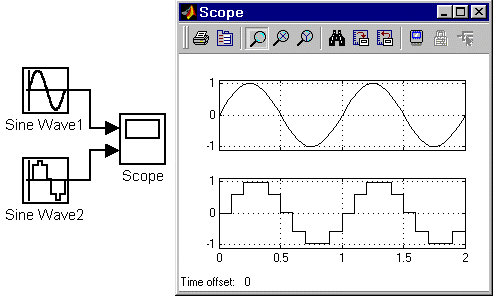 Рис. 9.1.2. Блок Sine Wave 9.1.3. Источник линейно изменяющегося воздействия Ramp Назначение: Формирует линейный сигнал вида y = Slope* time + Initial value. Параметры: 1. Slope — Скорость изменения выходного сигнала. 2. Start time — Время начала формирования сигнала. 3. Initial value — Начальный уровень сигнала на выходе блока. На Рис. 9.1.3. показано использование данного блока. 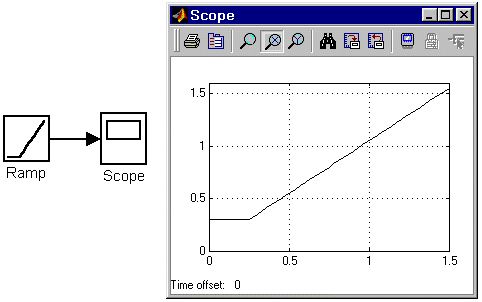 Рис. 9.1.3. Блок Ramp 9.1.4. Генератор ступенчатого сигнала Step Назначение: Формирует ступенчатый сигнал. Параметры: |