Simulink Инструмент моделирования динамических систем
 Скачать 2.28 Mb. Скачать 2.28 Mb.
|

|
General – общие параметры. Data history – параметры сохранения сигналов в рабочей области MATLAB. Вкладка общих параметров показана на рис. рис. 9.2.5. 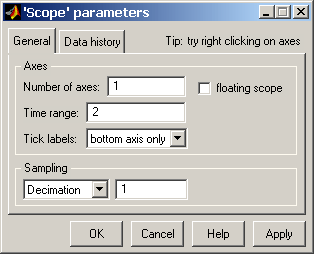 Рис. 9.2.5. Вкладка общих параметров General. На вкладке General задаются следующие параметры: 1. Number of axes — число входов (систем координат) осциллографа. При изменении этого параметра на изображении блока появляются дополнительные входные порты. 2. Time range — величина временного интервала для которого отображаются графики. Если время расчета модели превышает заданное параметром Time range, то вывод графика производится порциями, при этом интервал отображения каждой порции графика равен заданному значению Time range. 3. Tick labels — вывод/скрытие осей и меток осей. Может принимать три значения (выбираются из списка):
4. Sampling — установка параметров вывода графиков в окне. Задает режим вывода расчетных точек на экран. При выборе Decimation кратность вывода устанавливается числом, задающим шаг выводимых расчетных точек. На рис. 9.2.6 и 9.2.7. показаны графики синусоидальных сигналов рассчитанных с фиксированным шагом 0.1 с. На рис. 9.2.6 в окне блока Scope выводится каждая расчетная точка (параметр Decimation равен 1). На рис. 9.2.7 показан вывод каждого второго значения (параметр Decimation равен 2). Маркерами на графиках отмечены расчетные точки. 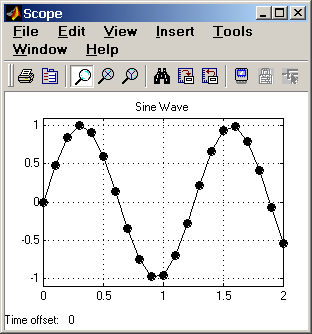 Рис. 9.2.6. Отображение синусоидального сигнала (Decimation = 1). 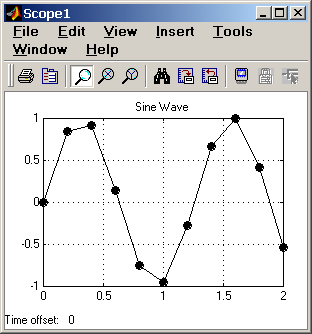 Рис. 9.2.7. Отображение синусоидального сигнала (Decimation = 2). В том случае, если режим вывода расчетных точек задается как Sample time, то его числовое значение определяет интервал квантования при отображении сигнала. На рис. 9.2.8 показан график синусоидального сигнала, для случая, когда значение параметра Sample time равно 0.1 . 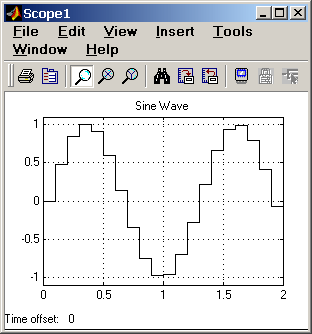 Рис. 9.2.8. Отображение синусоидального сигнала (Sample time = 0.1). 5. floating scope – перевод осциллографа в “свободный” режим (при установленном флажке). На вкладке Data history (рис. 9.2.9)задаются следующие параметры: 1. Limit data points to last – максимальное количество отображаемых расчетных точек графика. При превышении этого числа начальная часть графика обрезается. В том случае, если флажок параметра Limit data points to last не установлен, то Simulink автоматически увеличит значение этого параметра для отображения всех расчетных точек. 2. Save data to workspace – сохранение значений сигналов в рабочей области MATLAB. 3. Variable name – имя переменной для сохранения сигналов в рабочей области MATLAB. 4. Format – формат данных при сохранении в рабочей области MATLAB. Может принимать значения:
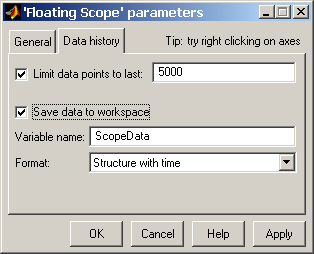 Рис. 9.2.9. Вкладка Data history. 9.2.2. Осциллограф Floating Scope Осциллограф Floating Scope, по сути, есть обычный осциллограф Scope, переведенный в “свободный” режим. Пример модели с осциллографом Floating Scope показан на рис. 9.2.10. 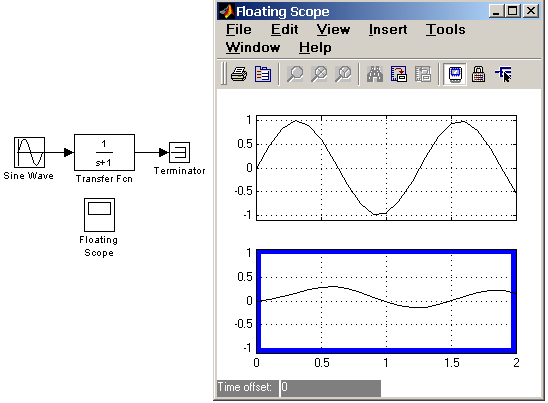 Рис. 9.2.10. Пример модели с осциллографом Floating Scope. В этом режиме блок осциллографа не имеет входов, а выбор отображаемого сигнала осуществляется с помощью инструмента 1. Выделить систему координат, в которой будет отображаться график. Это достигается с помощью одиночного щелчка левой клавишей “мыши” внутри нужной системы. Выбранная система координат будет подсвечена по периметру синим цветом. 2. С помощью инструмента 3. Отметить флажком имена блоков, сигналы с выхода которых требуется исследовать. После выполнения расчета в окне блока Floating Scope будут отображены выбранные сигналы. 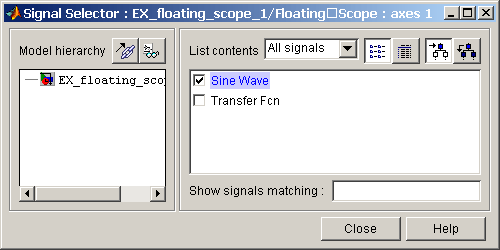 Рис. 9.2.11. Окно диалога Signal Selector 9.2.3. Графопостроитель ХУ Graph Назначение: Строит график одного сигнала в функции другого (график вида Y(X)). Параметры: x-min – Минимальное значение сигнала по оси X. x-max – Максимальное значение сигнала по оси X y-min – Минимальное значение сигнала по оси Y. y-max – Максимальное значение сигнала по оси Y Sample time – шаг модельного времени. Блок имеет два входа. Верхний вход предназначен для подачи сигнала, который является аргументом (X), нижний – для подачи значений функции (Y). На рис.9.2.12, в качестве примера использования графопостроителя, показано построение фазовой траектории колебательного звена. 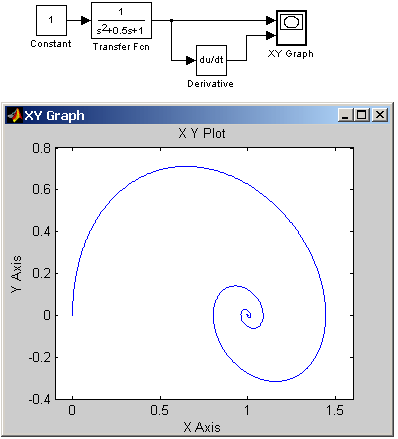 Рис. 9.2.12. Пример использования графопостроителя ХУ Graph. Графопостроитель можно использовать и для построения временных зависимостей. Для этого на первый вход следует подать временной сигнал с выхода блока Clock. Пример такого использования графопостроителя показан на рис. 9.2.13. 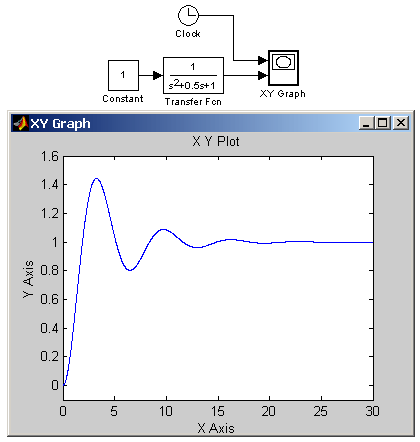 Рис. 9.2.13. Пример использования блока ХУ Graph для отображения временных зависимостей. 9.2.4. Цифровой дисплей Display Назначение: Отображает значение сигнала в виде числа. Параметры:
На рис. 2.9.14 показано применение блока Display с использованием различных вариантов параметра Format. 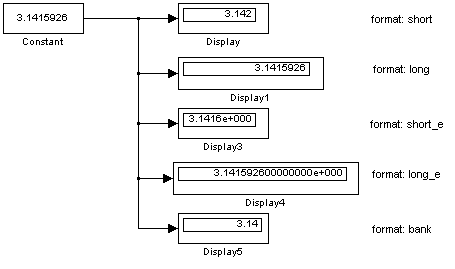 Рис. 9.2.14. Применение блока Display с использованием различных вариантов параметра Format. Блок Display может использоваться для отображения не только скалярных сигналов, но также векторных, матричных и комплексных. Рис. 2.9.15 иллюстрирует это. Если все отображаемые значения не могут поместиться в окне блока, в правом нижнем углу блока появляется символ 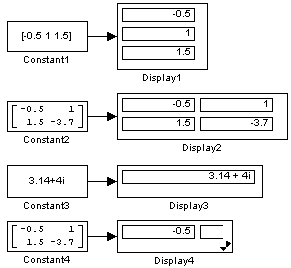 Рис. 9.2.15 Применение блока Display для отображения векторных, матричных и комплексных сигналов. 9.2.5. Блок остановки моделирования Stop Simulation Назначение: Обеспечивает завершение расчета, если входной сигнал блока становится не равным нулю. Параметры: Нет. При подаче на вход блока ненулевого сигнала Simulink выполняет текущий шаг расчета, а затем останавливает моделирование. Если на вход блока подан векторный сигнал, то для остановки расчета достаточно, чтобы один элемент вектора стал ненулевым. На рис. 2.9.16 показан пример использования данного блока. В примере остановка расчета происходит, если выходной сигнал блока Transfer Function становится большим или равным 0.99. 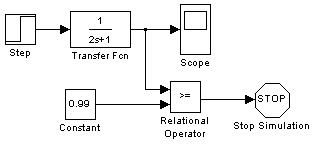 Рис. 9.2.16. Применение блока Stop Simulation 9.2.6. Блок сохранения данных в файле То File Назначение: Блок записывает данные, поступающие на его вход, в файл. Параметры:
Данные в файле сохраняются в виде матрицы: 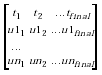 . .Значения времени записываются в первой строке матрицы, а в остальных строках будут находиться значения сигналов, соответствующих данным моментам времени. Файл данных (mat-файл), в который записываются данные, не является текстовым. Структура файла подробно описана в справочной системе MATLAB. Пользователям Simulink удобнее всего считывать данные из mat-файла с помощью блока From File (библиотека Sources). На рис. 9.2.17 показан пример использования данного блока. Результаты расчета сохраняются в файле result.mat. 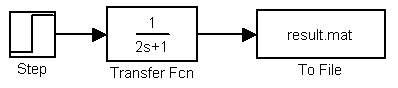 Рис. 9.2.17. Применение блока To File 9.2.7. Блок сохранения данных в рабочей области То Workspace Назначение: Блок записывает данные, поступающие на его вход, в рабочую область MATLAB. Параметры:
На рис. 9.2.18 показан пример использования данного блока. Результаты расчета сохраняются в переменной simout. Для считывания данных сохраненных в рабочей области MATLAB можно использовать блок From Workspace (библиотека Sources). 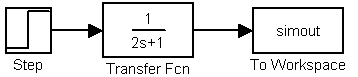 Рис. 9.2.18. Применение блока To Workspace 9.2.8. Концевой приемник Terminator Назначение: Блок используется для подачи сигнала с неиспользуемого выхода другого блока. Параметры: Нет. В том случае, если выход блока оказывается не подключенным ко входу другого блока, Simulink выдает предупреждающее сообщение в командном окне MATLAB. Для исключения этого необходимо использовать блок Terminator. На рис. 9.2.19 показан пример использования концевого приемника. Извлекаемый, с помощью блока Demux, из матрицы второй элемент не никак не используется, поэтому он подается на вход блока Terminator. 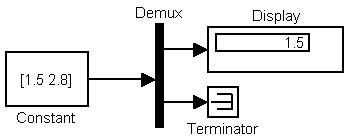 Рис. 9.2.19. Применение блока Terminator 9.2.9. Блок выходного порта Outport Назначение: Создает выходной порт для подсистемы или для модели верхнего уровня иерархии. Параметры:
9.2.9.1. Использование блока Outport в подсистемах Блоки Outport подсистемы являются ее выходами. Сигнал, подаваемый в блок Outport внутри подсистемы, передается в модель (или подсистему) верхнего уровня. Название выходного порта будет показано на изображении подсистемы как метка порта. При создании подсистем и добавлении блока Outport в подсистему Simulink использует следующие правила:
На рис. 9.2.19 показана модель, использующая подсистему и схема этой подсистемы. 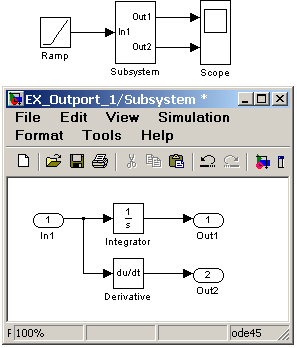 Рис. 9.2.19. Использование блока Outport в подсистеме В том случае, если подсистема является управляемой, то для ее выходных портов можно задать вид выходного сигнала для тех временных интервалов, когда подсистема заблокирована. На рис. 9.2.20 показана модель, использующая управляемую подсистему (схема подсистемы такая же, как и в предыдущем примере). Для первого выходного порта подсистемы параметр Output when disabled задан как held, а для второго – как reset, причем величина начального значения задана равной нулю. Графики сигналов показывают, что когда подсистема заблокирована, сигнал первого выходного порта остается неизменным, а сигнал второго становится равным заданному начальному значению (нулю). 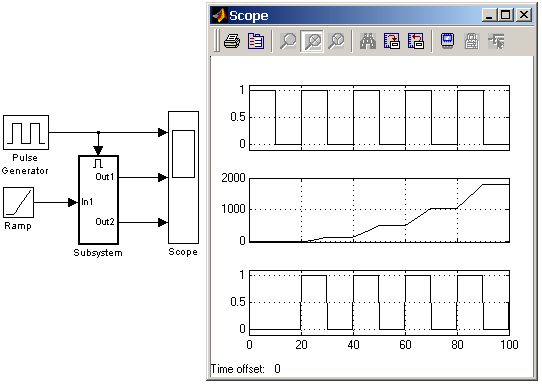 Рис. 9.2.20. Управляемая подсистема с различными настройками выходных портов. |