Simulink Инструмент моделирования динамических систем
 Скачать 2.28 Mb. Скачать 2.28 Mb.
|

|
Step time - Время наступления перепада сигнала (с). Initial value - Начальное значение сигнала. Final value - Конечное значение сигнала. Перепад может быть как в большую сторону (конечное значение больше чем начальное), так и в меньшую (конечное значение меньше чем начальное). Значения начального и конечного уровней могут быть не только положительными, но и отрицательными (например, изменение сигнала с уровня –5 до уровня –3). На Рис. 9.1.4. показано использование генератора ступенчатого сигнала. 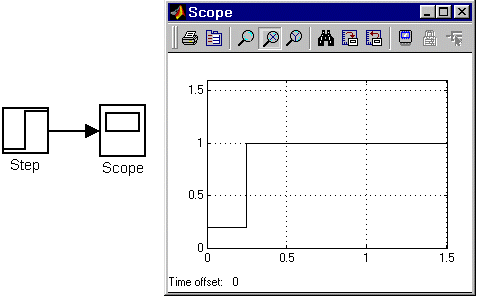 Рис. 9.1.4. Блок Step 9.1.5. Генератор сигналов Signal Generator Назначение: Формирует один из четырех видов периодических сигналов:
Параметры:
На Рис. 9.1.5. показано применение этого источника при моделировании прямоугольного сигнала. 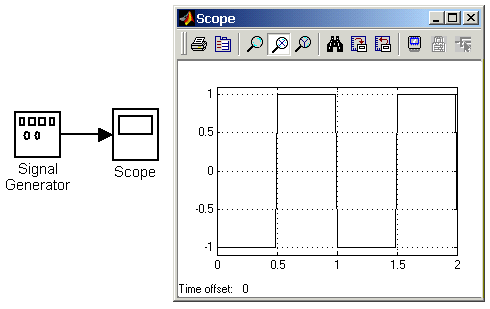 Рис. 9.1.5. Блок генератора сигналов 9.1.6. Источник случайного сигнала с равномерным распределением Uniform Random Number Назначение: Формирование случайного сигнала с равномерным распределением. Параметры :
Пример использования блока и график его выходного сигнала представлен на Рис. 9.1.6. 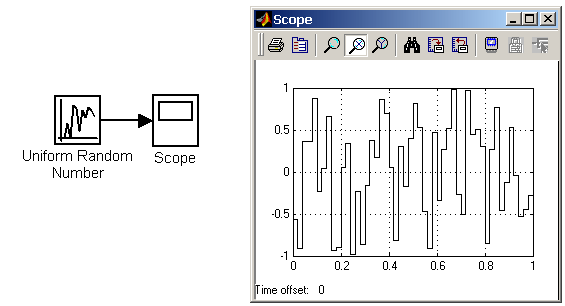 Рис. 9.1.6. Источник случайного сигнала с равномерным распределением 9.1.7. Источник случайного сигнала с нормальным распределением Random Number Назначение: Формирование случайного сигнала с нормальным распределением уровня сигнала. Параметры:
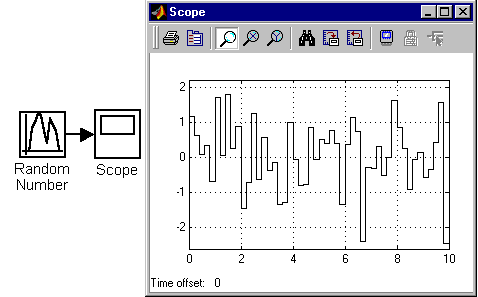 Рис. 9.1.7. Источник случайного сигнала с нормальным распределением 9.1.8. Источник импульсного сигнала Pulse Generator Назначение: Формирование прямоугольных импульсов. Параметры:
Пример использования Pulse Generator показан на рис. 9.1.8. 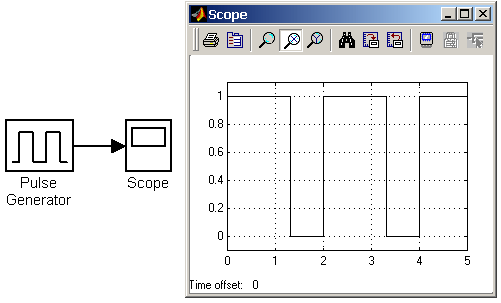 Рис. 9.1.8. Источник прямоугольных импульсов 9.1.9. Генератор линейно-изменяющейся частоты Chirp Generator Назначение: Формирование синусоидальных колебаний, частота которых линейно изменяется. Параметры:
Пример использования блока показан на Рис. 9.1.9. 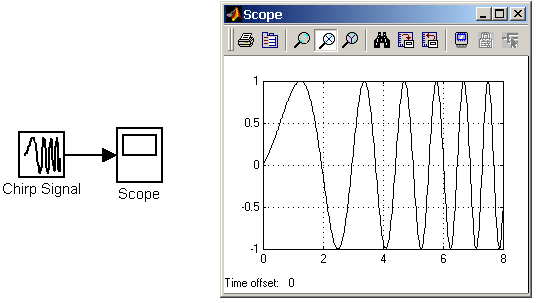 Рис. 9.1.9. Генератор линейно-изменяющейся частоты 9.1.10. Генератор белого шума Band-Limited White Noice Назначение: Создает сигнал заданной мощности, равномерно распределенной по частоте. Параметры:
Рис. 9.1.10 показывает работу этого генератора. 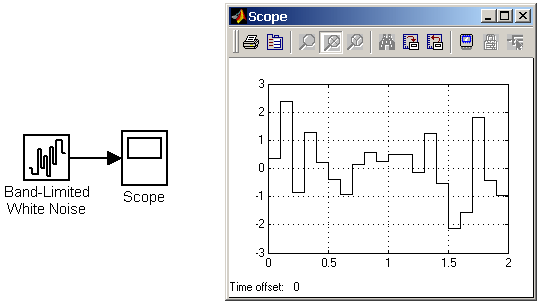 Рис. 9.1.10. Генератор белого шума 9.1.11. Источник временного сигнала Clock Назначение: Формирует сигнал, величина которого на каждом шаге расчета равна текущему времени моделирования. Параметры
На рис. 9.1.11 показан пример работы данного источника. 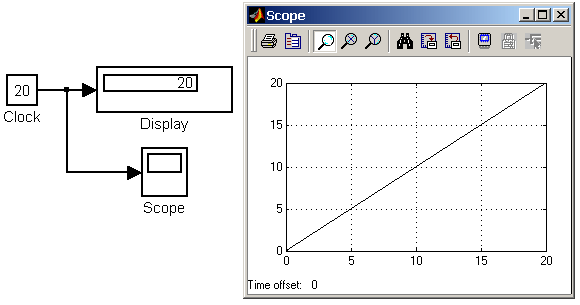 Рис. 9.1.11. Источник временного сигнала 9.1.12. Цифровой источник времени Digital Clock Назначение: Формирует дискретный временной сигнал. Параметр: Sample time – Шаг модельного времени (с). На Рис. 9.1.12 показана работа источника Digital Clock. 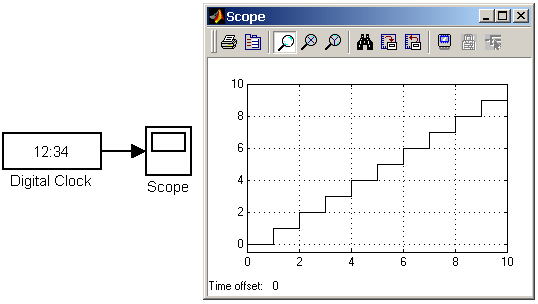 Рис. 9.1.12. Цифровой источник временного сигнала 9.1.13. Блок считывания данных из файла From File Назначение: Получение данных из внешнего файла. Параметры:
Данные в файле должны быть представлены в виде матрицы: 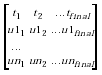 . .Матрица должна состоять, как минимум, из двух строк. Значения времени записаны в первой строке матрицы, а в остальных строках находятся значения сигналов, соответствующие данным моментам времени. Значения времени должны быть записаны в возрастающем порядке. Выходной сигнал блока содержит только значения сигналов, а значения времени в нем отсутствуют. Если шаг расчета текущей модели не совпадает с отсчетами времени в файле данных, то Simulink выполняет линейную интерполяцию данных. Файл данных (mat-файл), из которого считываются значения, не является текстовым. Структура файла подробно описана в справочной системе MATLAB. Пользователям Simulink удобнее всего создавать mat-файл с помощью блока To File (библиотека Sinks). На рис. 9.1.13 показан пример использования данного блока. Из файла data.mat считываются значения синусоидального сигнала. 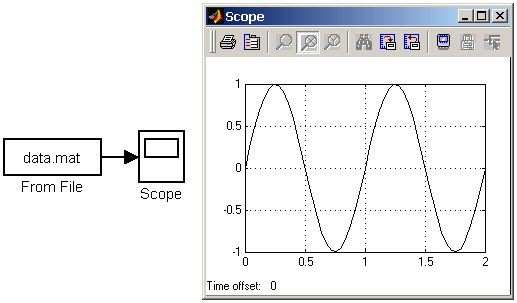 Рис. 9.1.13. Блок From File 9.1.14. Блок считывания данных из рабочего пространства From Workspace Назначение: Получение данных из рабочего пространства MATLAB. Параметры:
На рис. 9.1.14 показан пример использования данного блока. Данные в переменную simin рабочей области MATLAB загружаются из файла с помощью блока Read data. 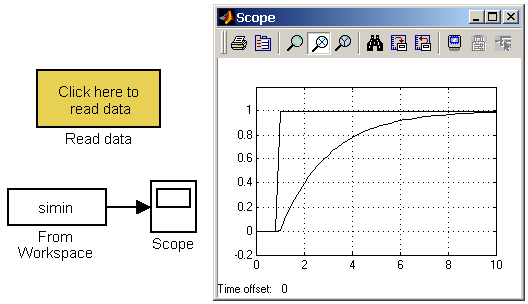 Рис. 9.1.14. Блок From File 9.1.15. Блок сигнала нулевого уровня Ground Назначение: Формирование сигнала нулевого уровня. Параметры: Нет. Если какой-либо вход блока в модели не подсоединен, то при выполнении моделирования в главном окне MATLAB появляется предупреждающее сообщение. Для устранения этого на неподключенный вход блока можно подать сигнал с блока Ground. На рис. 9.1.15 даны примеры использования блока. В первом случае сигнал с блока Ground поступает на один из входов сумматора, а во втором на один из входов блока умножения. Показания блоков Display подтверждают, что вырабатываемый блоком Ground сигнал имеет нулевое значение. Из рисунка также видно, что тип выходного сигнала блока устанавливается автоматически, в соответствии с типами сигналов, подаваемых на другие входы блоков (в данном случае – на входы блоков Sum и Product). 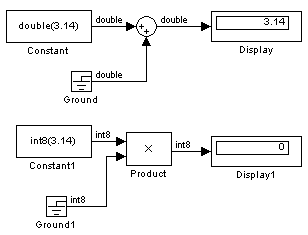 Рис. 9.1.15. Применение блока Ground 9.1.16. Блок периодического сигнала Repeating Sequence Назначение: Формирование периодического сигнала. Параметры:
Блок выполняет линейную интерполяцию выходного сигнала для моментов времени не совпадающих со значениями заданными вектором Time values. На рис. 9.1.16 показан пример использования блока для формирования пилообразного сигнала. Значения модельного времени заданы вектором [0 3], а значения выходного сигнала вектором [0 2]. 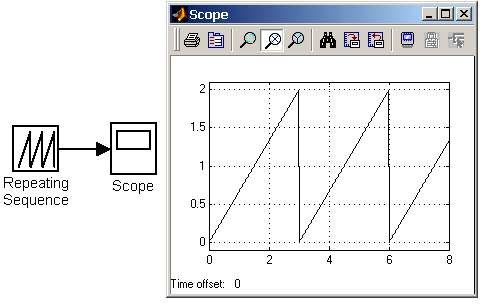 Рис. 9.1.16. Использование блока Repeating Sequence 9.1.17. Блок входного порта Inport Назначение: Создает входной порт для подсистемы или модели верхнего уровня иерархии. Параметры:
9.1.17.1. Использование блока Inport в подсистемах Блоки Inport подсистемы являются ее входами. Сигнал, подаваемый на входной порт подсистемы через блок Inport, передается внутрь подсистемы. Название входного порта будет показано на изображении подсистемы как метка порта. При создании подсистем и добавлении блока Inport в подсистему Simulink использует следующие правила:
На рис. 9.1.17 показана модель, использующая подсистему и схема этой подсистемы. 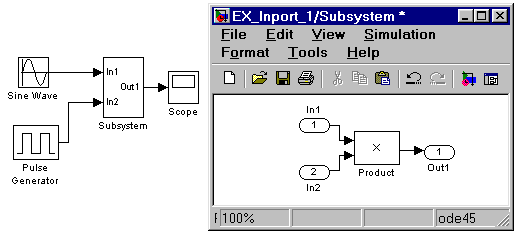 Рис. 9.1.17. Использование блока Inport в подсистеме 9.1.17.2. Использование блока Inport в модели верхнего уровня Входной порт в системе верхнего уровня используется для передачи сигнала из рабочей области MATLAB в модель. Для передачи сигнала из рабочего пространство MATLAB требуется не только установить в модели входной порт, но и выполнить установку параметров ввода на вкладке Workspace I/O окна диалога Simulation parameters… (должен быть установлен флажок для параметра Input и задано имя переменной, которая содержит входные данные). Тип вводимых данных: Array (массив), Structure (структура) или Structure with time (структура с полем "время") задается на этой же вкладке. На рис. 9.1.18 показана модель, считывающая входной сигнал из рабочего пространства MATLAB. Подсистема Load Data обеспечивает ввод данных из файла в рабочую область MATLAB. 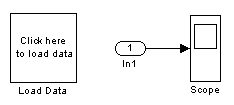 Рис. 9.1.18. Модель, считывающая входной сигнал из рабочего пространства MATLAB с помощью блока Input. 9.2. Sinks - приемники сигналов 9.2.1. Осциллограф Scope Назначение: Строит графики исследуемых сигналов в функции времени. Позволяет наблюдать за изменениями сигналов в процессе моделирования. Изображение блока и окно для просмотра графиков показаны на рис. 9.2.1. 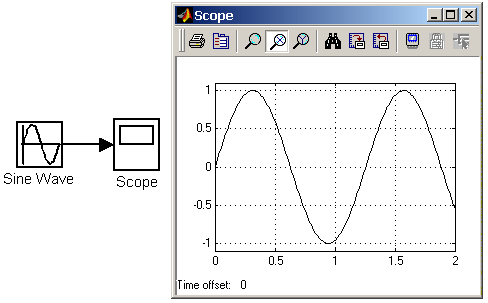 Рис. 9.2.1. Осциллограф Scope Для того, чтобы открыть окно просмотра сигналов необходимо выполнить двойной щелчок левой клавишей “мыши” на изображении блока. Это можно сделать на любом этапе расчета (как до начала расчета, так и после него, а также во время расчета). В том случае, если на вход блока поступает векторный сигнал, то кривая для каждого элемента вектора строится отдельным цветом. Настройка окна осциллографа выполняется с помощью панелей инструментов (рис.9.2.2). 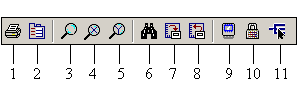 Рис. 9.2.2. Панель инструментов блока Scope Панель инструментов содержит 11 кнопок:
Изменение масштабов отображаемых графиков можно выполнять несколькими способами: 1. Нажать соответствующую кнопку ( 2. Нажать соответствующую кнопку ( 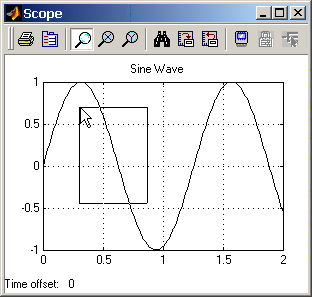 Рис. 9.2.3. Увеличение масштаба графика. 3. Щелкнуть правой клавишей “мыши” в окне графиков и, выбрать команду Axes properties… в контекстном меню. Откроется окно свойств графика, в котором с помощью параметров Y-min и Y-max можно указать предельные значения вертикальной оси. В этом же окне можно указать заголовок графика (Title), заменив выражение % 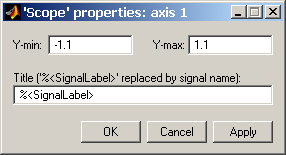 Рис. 9.2.4. Окно свойств графика. Параметры: Параметры блока устанавливаются в окне ‘Scope’ parameters, которое открывается с помощью инструмента |