Simulink Инструмент моделирования динамических систем
 Скачать 2.28 Mb. Скачать 2.28 Mb.
|

|
9.2.9.2. Использование блока Outport в модели верхнего уровня Выходной порт в системе верхнего уровня используется в двух случаях:
Для передачи сигнала в рабочее пространство MATLAB требуется не только установить в модели выходные порты, но и выполнить установку параметров вывода на вкладке Workspace I/O окна диалога Simulation parameters… (должен быть установлен флажок для параметра Output и задано имя переменной для сохранения данных). Тип сохраняемых данных - Array массив, Structure (структура) или Structure with time (структура с полем “время”) задается на этой же вкладке. На рис. 9.2.21 показана модель, передающая сигналы в рабочее пространство MATLAB. 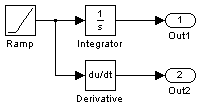 Рис. 9.2.21. Модель, передающая сигналы в рабочее пространство MATLAB с помощью блоков Outport. Блок Outport может использоваться также для связи модели с функциями анализа, например: linmod или trim. 9.3. Continuous – аналоговые блоки 9.3.1. Блок вычисления производной Derivative Назначение: Выполняет численное дифференцирование входного сигнала. Параметры: Нет. Для вычисления производной используется приближенная формула Эйлера: где Значение входного сигнала блока до начала расчета считается равным нулю. Начальное значение выходного сигнала также полагается равным нулю. Точность вычисления производной существенно зависит от величины установленного шага расчета. Выбор меньшего шага расчета улучшает точность вычисления производной. На рис. 9.3.1 показан пример использования дифференцирующего блока для вычисления производной прямоугольного сигнала. В рассматриваемом примере, для повышения наглядности, шаг расчета выбран достаточно большим. 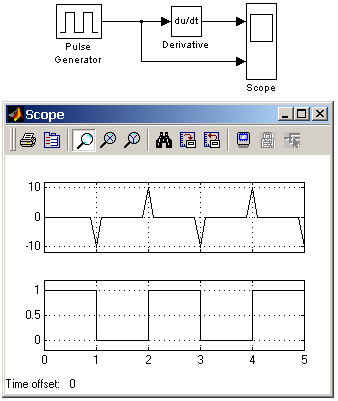 Рис.9.3.1. Использование блока Derivative для дифференцирования сигнала. Данный блок используется для дифференцирования аналоговых сигналов. При дифференцировании дискретного сигнала с помощью блока Derivative его выходной сигнал будет представлять собой последовательность импульсов соответствующих моментам времени скачкообразного изменения дискретного сигнала. 9.3.2. Интегрирующий блок lntegrator Назначение: Выполняет интегрирование входного сигнала. Параметры:
В том случае, если выбран какой-либо (но не none), тип управляющего сигнала, то на изображении блока появляется дополнительный управляющий вход. Рядом с дополнительным входом будет показано условное обозначение управляющего сигнала.
На рис. 9.3.2 показан пример работы интегратора при подаче на его вход ступенчатого сигнала. Начальное условие принято равным нулю. 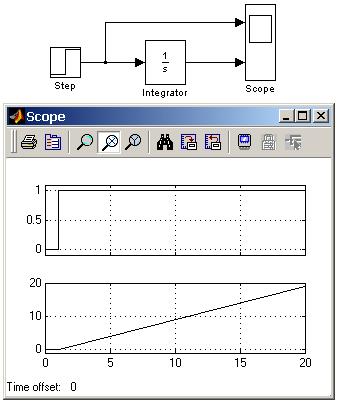 Рис. 9.3.2. Интегрирование ступенчатого сигнала. Пример на рис. 9.3.3 отличается от предыдущего подачей начального значения через внешний порт. Начальное значение выходного сигнала в данном примере задано равным –10. 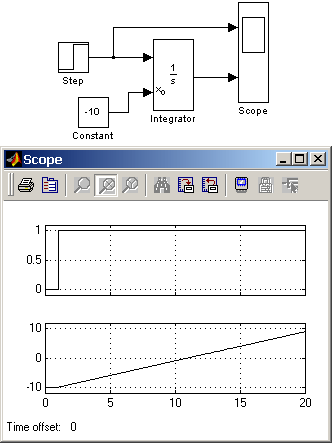 Рис. 9.3.3. Интегрирование ступенчатого сигнала с установкой начального значения выходного сигнала. Пример на рис. 9.3.4 демонстрирует использование входного порта для сброса выходного сигнала и порта состояния интегратора с целью организации обратной связи. Схема работает следующим образом: входной постоянный сигнал преобразуется интегратором в линейно-изменяющийся, по достижении выходным сигналом значения равного 1 блок Relational Operator вырабатывает логический сигнал, по переднему фронту которого происходит сброс выходного сигнала интегратора до начального значения равного нулю. В результате на выходе интегратора формируется пилообразный сигнал, изменяющийся от 0 до +1. 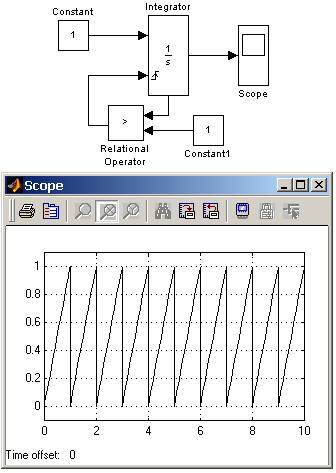 Рис. 9.3.4. Генератор пилообразного сигнала на основе интегратора. Следующая схема (рис. 9.3.5) использует установку начального значения интегратора с помощью его выходного сигнала. В первый момент времени начальное значение выходного сигнала интегратора с помощью блока IC (Initial Condition) устанавливается равным нулю. По достижении выходным сигналом значения равного 1 блок Relational Operator подает сигнал сброса выходного сигнала интегратора на начальный уровень, при этом сигналом, задающим начальный уровень, оказывается инвертированный выходной сигнал интегратора (т.е. -1). Далее цикл работы схемы повторяется. В отличие от предыдущей схемы выходным сигналом генератора является двуполярный сигнал. 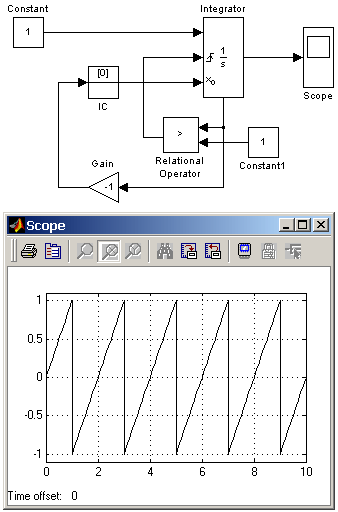 Рис. 9.3.5. Генератор двуполярного пилообразного сигнала на основе интегратора. 9.3.3. Блок Memory Назначение: Выполняет задержку входного сигнала на один временной такт. Параметры:
На рис. 9.3.6 показан пример использования блока Memory для задержки дискретного сигнала на один временной такт. 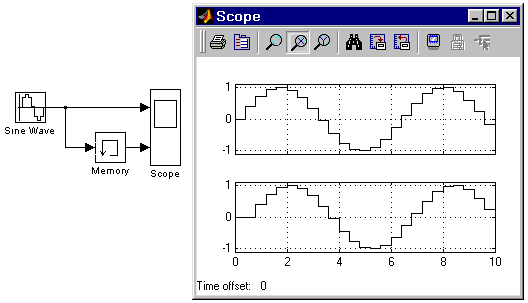 Рис. 9.3.6. Применение блока для задержки сигнала на один временной такт 9.3.4. Блок фиксированной задержки сигнала Transport Delay Назначение: Обеспечивает задержку входного сигнала на заданное время. Параметры:
При выполнении моделирования значение сигнала и соответствующее ему модельное время сохраняются во внутреннем буфере блока Transport Delay. По истечении времени задержки значение сигнала, извлекается из буфера и передается на выход блока. В том случае, если шаги модельного времени не совпадают со значениями моментов времени для записанного в буфер сигнала, блок Transport Delay выполняет аппроксимацию выходного сигнала. В том случае, если начального значения объема памяти буфера не хватит для хранения задержанного сигнала, Simulink автоматически выделит дополнительную память. После завершения моделирования в командном окне MATLAB появится сообщение с указанием нужного размера буфера. На рис. 9.3.7 показан пример использования блока Transport Delay для задержки прямоугольного сигнала на 0.5 с. 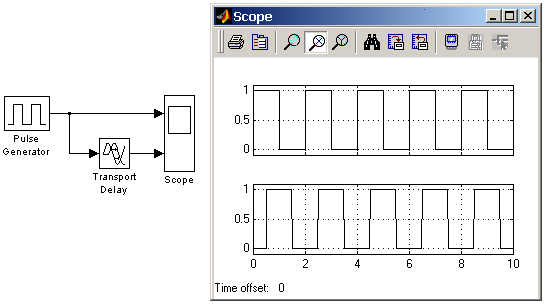 Рис. 9.3.7. Пример использования блока Transport Delay для задержки сигнала. 9.3.5. Блок управляемой задержки сигнала Variable Transport Delay Назначение: Выполняет задержку входного сигнала, заданную величиной сигнала управления. Параметры:
Блок управляемой задержки Variable Transport Delay работает аналогично блоку постоянной задержки сигнала Transport Delay. В том случае, если значение управляющего сигнала задающего величину задержки превышает значение, заданное параметром Maximum delay, то задержка выполняется на величину Maximum delay. На рис. 9.3.8 показан пример использования блока Variable Transport Delay. Величина времени задержки сигнала изменяется от 0.5c до 1с в момент времени равный 5с. 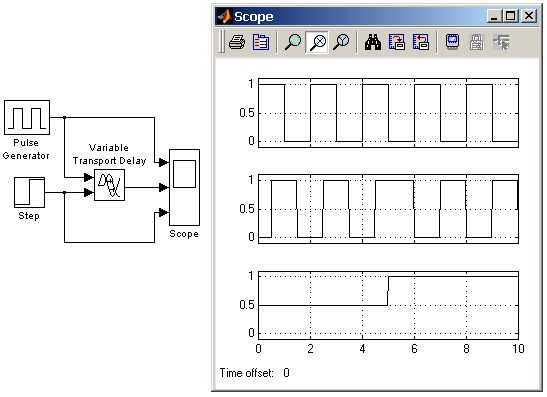 Рис. 9.3.8. Пример использования блока Variable Transport Delay. 9.3.6. Блок передаточной функции Transfer Fcn Назначение: Блок передаточной характеристики Transfer Fcn задает передаточную функцию в виде отношения полиномов: где nnи nd – порядок числителя и знаменателя передаточной функции, num – вектор или матрица коэффициентов числителя, den – вектор коэффициентов знаменателя. Параметры:
Порядок числителя не должен превышать порядок знаменателя. Входной сигнал блока должен быть скалярным. В том случае, если коэффициенты числителя заданы вектором, то выходной сигнал блока будет также скалярным (как и входной сигнал). На рис. 9.3.8 показан пример моделирования колебательного звена с помощью блока Transfer Fcn. 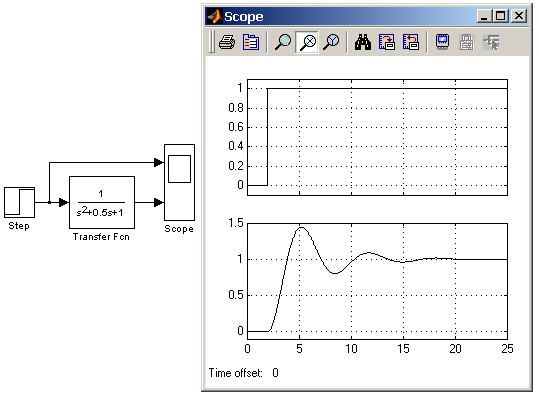 Рис. 9.3.8. Пример моделирования колебательного звена. Если коэффициенты числителя заданы матрицей, то блок Transfer Fcn моделирует векторную передаточную функцию, которую можно интерпретировать как несколько передаточных функций имеющих одинаковые полиномы знаменателя, но разные полиномы числителя. При этом выходной сигнал блока является векторным и количество строк матрицы числителя задает размерность выходного сигнала. На рис. 9.3.9 показан пример блока Transfer Fcn задающий векторную передаточную функцию. Там же показана модель полностью аналогичная рассматриваемой по своим свойствам, но состоящая из отдельных блоков Transfer Fcn. 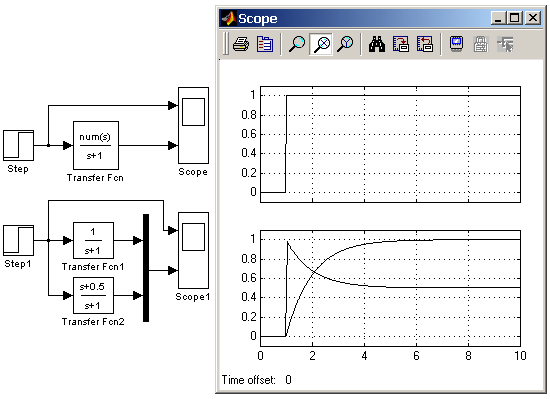 Рис. 9.3.9. Пример моделирования векторной передаточной функции и ее аналог. Начальные условия при использовании блока Transfer Fcn полагаются нулевыми. Если же требуется, чтобы начальные условия не были нулевыми, то необходимо с помощью функции tf2ss (инструмент Control System Toolbox) перейти от передаточной функции к модели в пространстве состояний и моделировать динамический объект с помощью блока State-Space. 9.3.7. Блок передаточной функции Zero-Pole Назначение: Блок Zero-Pole определяет передаточную функцию с заданными полюсами и нулями: где Z – вектор или матрица нулей передаточной функции (корней полинома числителя), P – вектор полюсов передаточной функции (корней полинома знаменателя), K – коэффициент передаточной функции, или вектор коэффициентов, если нули передаточной функции заданы матрицей. При этом размерность вектора K определяется числом строк матрицы нулей. Параметры:
Количество нулей не должно превышать число полюсов передаточной функции. В том случае, если нули передаточной функции заданы матрицей, то блок Zero-Pole моделирует векторную передаточную функцию. Нули или полюса могут быть заданы комплексными числами. В этом случае нули или полюса должны быть заданы комплексно-сопряженными парами полюсов или нулей, соответственно. Начальные условия при использовании блока Zero-Pole полагаются нулевыми. На рис. 9.3.10 показан пример использования блока Zero-Pole. В примере передаточная функция имеет один действительный нуль и два комплексно-сопряженных полюса. 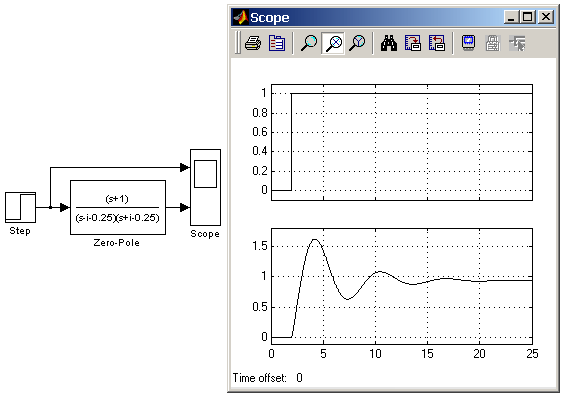 Рис. 9.3.10. Пример использования блока Zero-Pole. 9.3.8. Блок модели динамического объекта State-Space Назначение: Блок создает динамический объект, описываемый уравнениями в пространстве состояний: где x – вектор состояния, u – вектор входных воздействий, y – вектор выходных сигналов, A, B, C, D - матрицы: системы, входа, выхода и обхода, соответственно. Размерность матриц показана на рис. 9.3.11 (n – количество переменных состояния, m – число входных сигналов, r – число выходных сигналов). 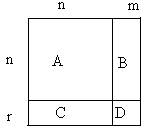 Рис. 9.3.11. Размерность матриц блока State-Space Параметры: |