отчет. Система управления лифтом
 Скачать 1.86 Mb. Скачать 1.86 Mb.
|

1.2 Построение нагрузочной диаграммыЧто бы определить возможные перегрузки двигателя во времени нужно знать, как изменяется момент, и мощность двигателя в течение рабочего цикла, то есть иметь нагрузочную диаграмму электропривода. Нагрузочными диаграммами называют графические зависимости момента и мощности электропривода (иногда и тока двигателя) от времени. Рисунок -Нагрузочная диаграмма На рисунке 2 показана нагрузочная диаграмма электропривода лифта 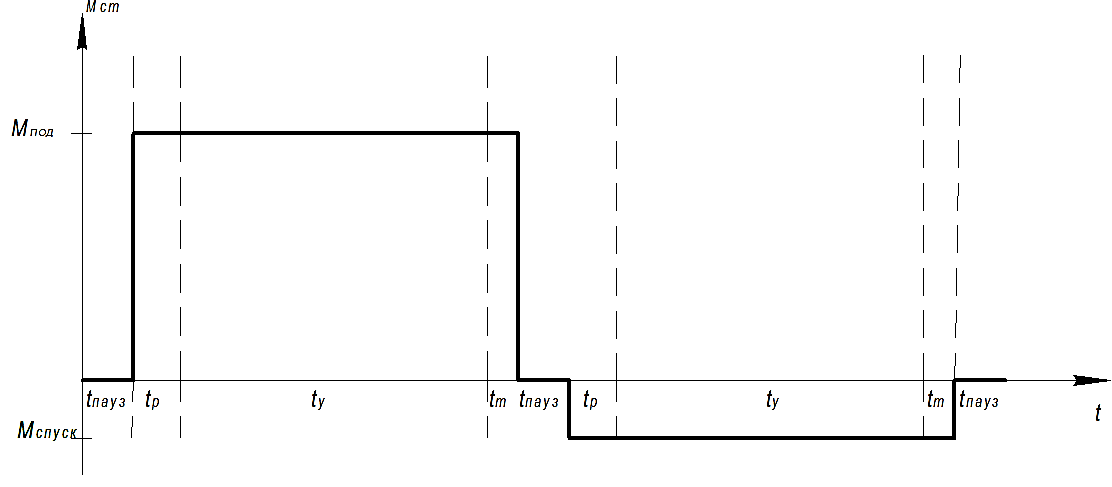 2 Выбор электродвигателя и проверка его на перегрузку2.1 Выбор двигателяЭлектродвигатель выбирается из каталога в соответствии с условиями:  ; ; (17) (17) . (18) . (18)В большинстве случаев в качестве приводных электродви гателей лифтов применяются одно и двухскоростные асин хронные электродвигатели с короткозамкнутым ротором. Наиболее проста система электропривода с односкоростным электродвигателем, который выполняется с повышенным скольжением, обладает при относительно больших значениях пускового момента небольшим пусковым током. Пуск элек тродвигателя осуществляется непосредственным подключе нием обмотки статора к питающей сети, остановка — отклю чением электродвигателя от сети с одновременным наложе нием колодок механического тормоза. Согласно приведенным выше расчетам нам требуется выбрать двигатель со следующими параметрами:  ; ;  Общепромышленные унифицированные асинхронные электродвигатели АИР трехфазного типа представлены в разнообразных модификациях, с максимальной мощностью до 315 кВт. Структура условного обозначения электродвигателей (АИХХХХХХХХХХХ): А – асинхронный; И - унифицированная серия (И - Интерэлектро); Х - Привязка мощностей к установочно-присоединительным размерам (Р - по РС 3031 -71, С - по CENELEK док. 28/64); Х - Р - с повышенным пусковым моментом, - С - с повышенным скольжением; XXX - габарит, мм; Х - установочный размер по длине станины (S,M,L); Х - длина сердечника статора (А или В, отсутствие буквы- означает только одну длину сердечника - первую); Х - число полюсов: 2, 4, 6, 8; X - дополнительные буквы для модификаций электродвигателя (Б - со встроенной температурной защитой); П - с повышенной точностью по установочным размерам; Х2 - химически стойкие; С - сельскохозяйственные); XX - климатическое исполнение электродвигателя (У, Т, ХЛ) и категория размещения (1, 2, 3, 4, 5). Условия эксплуатации:
Конструктивное исполнение: Двигатели изготавливаются в двух вариантах исполнения: в алюминиевом (чугунные щиты, алюминиевая станина), либо в чугунном (и щиты, и станина – из чугуна). Конструкция и способ монтажа электродвигателей регламентируется ГОСТ 2479-79. Структура условного обозначения (Х Х XX Х): X Латинские буквы IМ или М X Конструктивное исполнение (одна цифра) XX Способ монтажа (две цифры) X Исполнение конца вала (одна цифра) По способу монтажа производство электродвигателей АИР происходит в исполнении (1-я цифра): IМ1 - на лапах с подшипниковыми щитами; IМ2 - на лапах с подшипниковыми щитами и фланцем со стороны привода; IМЗ - без лап с подшипниковыми щитами и фланцем со стороны привода. Условные обозначения концов вала (4-я цифра): 1 - с одним цилиндрическим концом вала; 2- c двумя цилиндрическими концами вала. Продуманная конструкция двигателей позволяет обеспечивать их функционирование и сохранение технических параметров заданной надежности на протяжении всего срока их службы и, кроме того, гарантирует удобство и безопасность эксплуатации и монтажа.[2] Выберем двигатель АИР100L2. Характеристики данного двигателя представлены в приложении А в таблице А.1. |