отчет. Система управления лифтом
 Скачать 1.86 Mb. Скачать 1.86 Mb.
|

6.2 Разработка структурной схемы системыРисунок 5-разомкнутая система Построим структурную схему разомкнутой системы. На рисунке 5 показана структурная схема разомкнутой системы 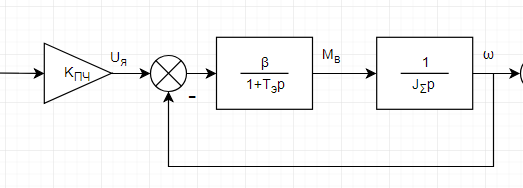 На рисунке 6 изображена замкнутая система. 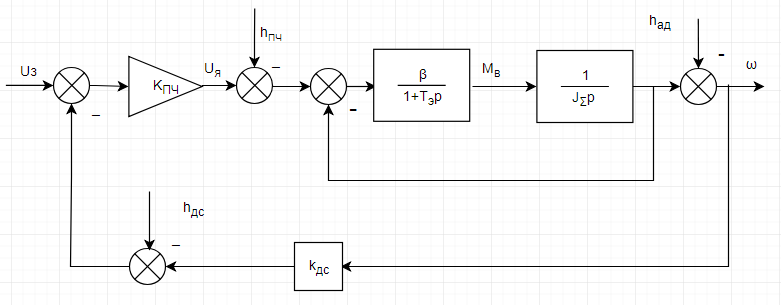 Рисунок 6-Замкнутая система 6.3 Расчет статической ошибки замкнутой системыСтатическая ошибка определяется следующей формулой:  , (28) , (28)где  -ошибка изменения напряжения питающей сети, -ошибка изменения напряжения питающей сети, -ошибка двигателя, обусловленная скольжением, -ошибка двигателя, обусловленная скольжением, -ошибка, определяемая разрешением энкодера. -ошибка, определяемая разрешением энкодера.Одним из основных возмущающих воздействий двигателя является изменение его скорости вращения, обусловленное скольжением.  =0,04*3000=120[об/мин]. =0,04*3000=120[об/мин].Основным возмущающим воздействием управляемого преобразователя будет изменение напряжения питающей сети. Величину данной помехи возьмем согласно стандарту ГОСТ 13109-97, определяющего нормы качества электрической энергии в системах энергоснабжения. Колебания напряжения питающей сети определяются предельно допустимым значением суммы установившегося отклонения напряжения δUy и размаха изменений напряжения δUt в точках присоединения к электрическим сетям. При напряжении 0,38 кВ это значение равно ± 10 % от номинального напряжения:  =0,1*3000=300[об/мин]. =0,1*3000=300[об/мин].Основное возмущающее воздействие от энкодера при передаче им скорости вращения асинхронного двигателя будет определяться разрешением датчика:  =0,0003 [об/мин]. =0,0003 [об/мин].Подставим найденные значения в формулу (28) и получим значение статической ошибки:  [об/мин]. [об/мин].Относительная статическая ошибка будет равна:  . (29) . (29)Полученное значение статической ошибки превышает требуемое по заданию. Исходя из этого необходимо настроить систему на технический оптимум. 7 Настройка системы на технический оптимумРисунок 7-Система до настройки Для начала построим переходную характеристику системы без настройки. На рисунке 7 показана переходная характеристика системы до коррекции. Структурная схема для построения переходного процесса системы до коррекции изображена на рисунке Б.1 в приложении Б. 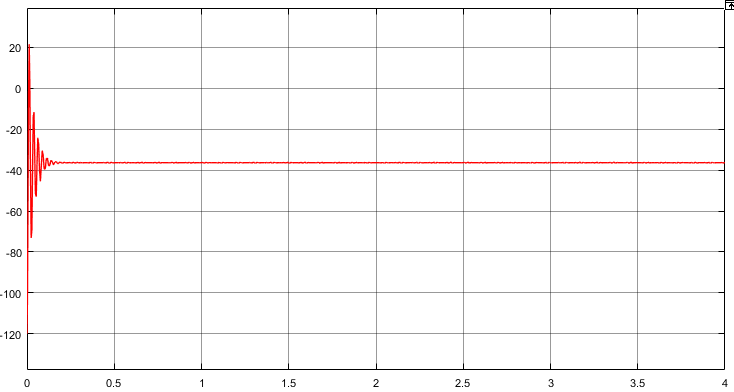 Для настройки системы добавим ПИД-регулятор в систему и подберем его коэффициенты для обеспечения требуемой статической ошибки. На рисунке 8 показан переходный процесс системы после настройки. В результате настройки системы были подобраны следующие параметры ПИД-регулятора: П=57; И=400; Д=0,35 Структурная схема для построения переходного процесса системы после настройки изображена на рисунке Б.2 в приложении Б. 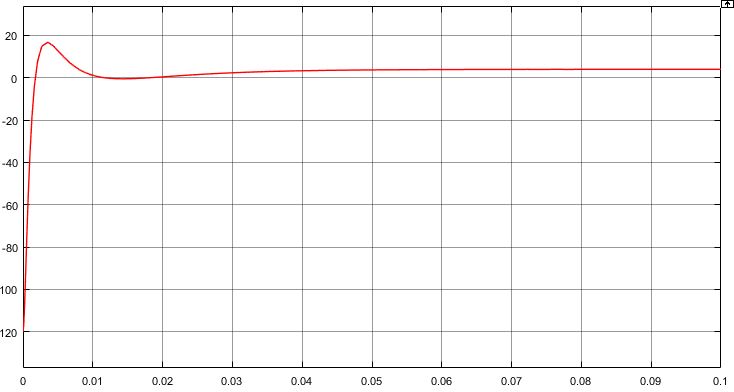 Рисунок 8-Система после настройки 8 Схема общей автоматикиПри условии, что вызов происходит из кабины: Кнопки S3- S5 служат для выбора этажа. S3 – подняться на первый этаж. S4 – на третий. S5 – на седьмой. Если лифт находится на первом этаже (DI7) и двери лифта закрыты (DI10):
Если лифт находится на третьем этаже (DI8) и двери лифта закрыты (DI10):
Если лифт находится на седьмом этаже (DI9) и двери лифта закрыты (DI10):
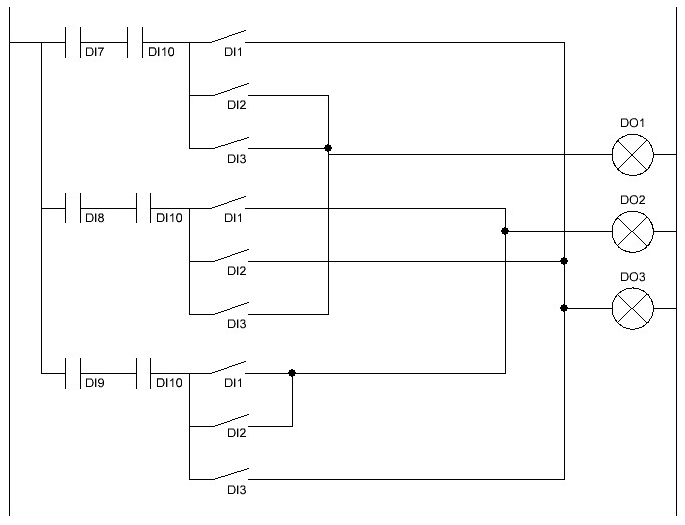 Рисунок 9 – Программа функционирования лифта при вызове из кабины При условии, что вызов происходит на этаже: Кнопки S6-S8 служат для вызова лифта на этаж. S6 – вызывает лифт на первый этаж. S7 – на третий, S8 – на седьмой. Если вызов происходит на первом этаже S6 (DI4) и двери лифта закрыты (DI10):
Если вызов происходит на третьем этаже S7 (DI5) и двери лифта закрыты (DI10):
Если вызов происходит на седьмом этаже S8 (DI6) и двери лифта закрыты (DI10):
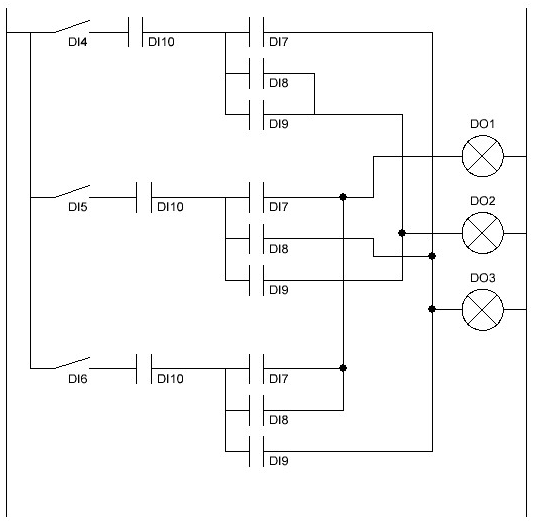 Рисунок 10 – Программа функционирования лифта при вызове с этажа Логические выражения полученые на основании составленных программ, будут выглядеть следующим образом: DO1 = DI10*(DI7*DI2+ DI7*DI3+DI8*DI3+DI5*DI7+DI6*DI7+DI6*DI8) DO2 = DI10* (DI8*DI1+DI9*DI1+DI9*DI2+DI4*DI8+DI4*DI9+DI5*DI9) DO3 = DI10* (DI7*DI1+DI8*DI2+DI9*DI3+DI4*DI7+DI5*DI8+DI6*DI9)
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||