отчет. Система управления лифтом
 Скачать 1.86 Mb. Скачать 1.86 Mb.
|

|
МИНОБРНАУКИ РОССИИ  Федеральное государственное бюджетное образовательное учреждение высшего образования «Самарский государственный технический университет» (ФГБОУ ВО «САМГТУ») Институт автоматики и информационных технологий Кафедра «Автоматика и управление в технических системах» Курсовая работа по теме: «Система управления лифтом» Вариант №17 Выполнил: Студент 3-АИТ-1 Шишов Н.С. Проверил: к.т.н., доцент Щетинин В.Г. Самара 2018 СодержаниеВведение 3 1 Расчет характеристик электродвигателя, построение нагрузочной диаграммы 7 1.1 Расчет требуемой мощности, момента и частоты вращения электродвигателя 7 1.2 Построение нагрузочной диаграммы 11 2 Выбор электродвигателя и проверка его на перегрузку 13 2.1 Выбор двигателя 13 2.2 Проверка двигателя на перегрузочные нагрузки 16 3 Расчет времени разгона двигателя до номинальной скорости 18 4 Выбор частотного преобразователя 21 5 Выбор датчика скорости 26 6 Разработка структурной схемы системы 27 6.1 Расчет передаточных функций 27 6.2 Разработка структурной схемы системы 29 6.3 Расчет статической ошибки замкнутой системы 30 7 Настройка системы на технический оптимум 33 8 Схема общей автоматики 35 9 Принципиальная электрическая схема 39 Заключение 41 Использованные ресурсы 42 Приложение А 44 Приложение Б 50 Приложение В 51 Приложение Г 55 ВведениеЭлектромеханические системы (ЭМС)-класс технических систем (ТС), представляющих собой сочетание механических, электромеханических, электронных и микропроцессорных компонентов, образующих определенную управляемую целостность.[3] Электромеханические системы занимают центральное место в подавляющем большинстве технических систем. Они обеспечивают возможность регулирования параметров механического движения объектов управления (скорость, ускорение, угловое или линейное перемещение, сила, момент и др.). Как правило, данная функция должна выполняться автоматически.[5] В промышленности, науке, в быту используются разнообразные машины, механизмы и устройства, которые облегчают деятельность человека, повышают производительность и качество, уровень безопасности и комфортности и т.д. Приведем несколько примеров: в промышленности - приводы станков, бумагоделательных машин, подъемно-транспортного оборудования и др. в научных исследованиях - приводы и следящие системы телескопов, системы пространственного управления лазерным излучением и тд. в быту - кондиционеры, пылесосы, стиральные и посудомоечные машины.[7] Исходные материалы для курсовой работы представлены в таблице 1. Таблица 1-Исходные данные для курсовой работы
На рисунке 1 представлена кинематическая схема лифта, где приняты следующие обозначения: ЭД — электродвигатель; Т —тормоз; Р —редуктор; КШ — канатоведущий шкив; К — кабина; Пр — противовес; ПК — подъемный канат; УК — уравновешивающий канат; Н — высота подъема. 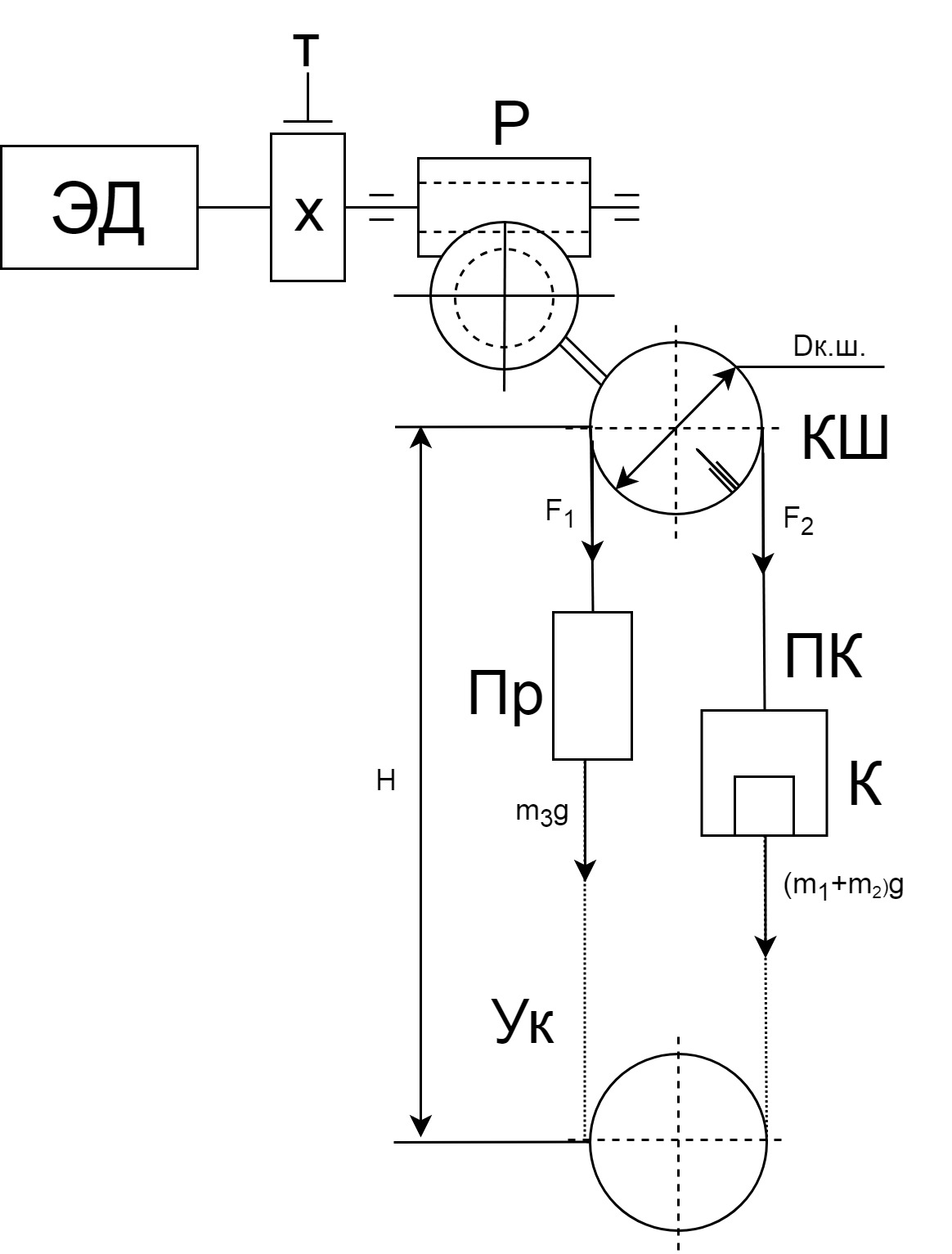 Рисунок -Кинематическая схема лифта | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||


 [рад/с]
[рад/с] [м/
[м/ ]
] [м/
[м/
