отчет. Отчет ПРЕДДИПЛОМНЫЙ 4 курс. Содержание раздел Устройство судна. Основные маневренные элементы. Таблица ап1п кодекса пднв78 с поправками
 Скачать 3.38 Mb. Скачать 3.38 Mb.
|

Систематически и аккуратно вести установленные журналы;Способствовать созданию благоприятного психологического климата в коллективе, ориентировать подчиненных на выполнение задач, поставленных руководством компанииРаздел 4. Организация штурманской службы. Обязанности ВПК при подготовке к рейсу. Порядок комплектования судовой коллекции картПорядок подбора карт и пособий на рейс по каталогу карт и книгОпределение поправок штурманских приборовРаздел 5 . Штурманская работа в рейсе. Таблица А-П / 1-1,А-П / 1-2 кодекса ПДНВ – 78 с поправками Вложить на кальке или на навигационной карте навигационную прокладку за 2 вахты с расчетами, для кот. Выполнить расчет остойчивости и грузовой план с расчетами КК скоростей «ОМС»Раздел 6. Технические средства судовождения (ТСС) Порядок включения и настройки РЛС установленные на судне. FURUNO FR 2115 Включение станции Перед включением станции (из полностью обесточенного состояния) необходимо установить органы управления прибора И в положения, рекомендованные в таблице 1 Таблица 1
Только после этого можно приступить к включению станции. Для этого установить выключатель напряжения бортовой сети в положение ВКЛ. О подаче на станцию напряжения сети свидетельствует свечение соответствующей сигнальной лампы на панели прибора КУ. Включить машинный преобразователь кнопкой управления. Тумблеры РЛС-ОТКЛ. и АНТЕННА-ОТКЛ. установить в положение РЛС и АНТЕННА. При этом должны включиться все приборы станции, за исключением устройства «Альфа» («Ольха»). На экране прибора И должна наблюдаться развертка, подсвеченная шумами, отметка курса, визир дальности, метки дальности и линия электронного визира направления Приблизительно через 4 мин. после включения РЛС на приборе И нажать кнопку ПЗ и по свечению сигнальной лампы ПЗ убедиться о включении передатчика ПЗ. На экране ЭЛТ при этом должны появиться в центре отметка зондирующего импульса передатчика и отметки объектов в зоне обзора станции. Регулированием напряжения ВРУ — при вращении регулятора ВОЛНЫ из крайнего левого в крайнее правое положение должно наблюдаться на экране ЭЛТ уменьшение засветки экрана в ближней зоне отражениями от волн при их наличии, или подавление шумов приемника в ближней зоне при отсутствии волнения. Проверить общую работоспособность станции, для чего нажать на пульте управления кнопку КОНТРОЛЬ РЛС на шкале дальности 1 миля. При этом на экране должна появиться отметка видеосигнала на КУ 180°. При переключении шкал дальности рекомендуется отключать передатчик. 1. Настройка и подстройка изображения РЛС: а) обнаружение эхосигнала объекта при различных обстоятельствах в значительной степени зависит от настройки станции и, в частности, от правильной регулировки усиления приемника. Последнее требует практического опыта, приобретенного в морской обстановке; б) практикой работы с судовыми РЛС выработан определенный порядок настройки изображения, заключающейся в следующем. При выведенном усилении делают яркость экрана такой, чтобы линия развертки стала слегка заметной. Вводят изображение неподвижных колец дальности и фокусировкой делают их возможно более тонкими. Затем вводят усиление; в) лучшее положение ручки «Усиление» такое, при котором по всей площади экрана появляется слабый мерцающий фон шумов приемника. Такое положение соответствует максимальной чувствительности приемника и позволяет обнаруживать объекты на максимальной дальности. Недостаточное усиление может привести к потере обнаружения небольших объектов, дающих слабые эхосигналы. Чрезмерное усиление приводит к потере контраста изображения и затрудняет наблюдение. Судоводители часто практикуют уменьшение усиления для выделения сильных эхосигналов. Следует помнить, что делать это можно недолго, каждый раз восстанавливая нормальное усиление. Это же относится к периодам уменьшения усиления при просмотре части экрана, замаскированной засветкой от сильных осадков; г) следует следить также за яркостью изображения. Слабая яркость затрудняет наблюдение, а чрезмерная — вызывает расфокусирование изображения. При переключении шкал дальности яркость необходимо подстраивать; д) после регулировки яркости и усиления устанавливаются режим относительного или истинного движения; ориентация изображения; шкала дальности; освещение азимутальной шкалы и счетчика дальности; яркость ПКД, линии курса и электронного визира. ПКД, линии курса и электронного визира. Порядок включения и настройки АИС, GPS, (ГЛОНАСС) AIS «TRANSAS Т-105» Включение приемопередатчика Приемопередатчик Т-105 не имеет выключателя питания и разработан так, чтобы постоянно быть под напряжением. При первом включении питания в течение 5 секунд до показа главного экрана на дисплее отображается текст «Автоматическая идентификационная система». Меню установки Доступные настройки и опции: • Установка идентификации - ввод идентификационных сведений судна, включая номер MMSI название, позывной, тип и номер ИМО судна. Это меню защищено паролем. • Размеры - ввод размеров судна и расположение внутренних и внешних антенн ГНСС. Это меню защищено паролем. • Изменение пароля - ввод нового системного пароля. Это меню защищено паролем. • Регионы - с помощью этого пункта меню пользователь может создавать списки, изменять и добавлять определения регионов. Это меню защищено паролем. • Конфигурирование датчиков - это подменю позволяет регулировать скорость передачи данных портов ввода данных трех датчиков. Это меню защищено паролем. • Настройки АИС для внутр. судоходства • Устан. мощи. - ручная настройка мощности приемопередатчика АИС либо на 1 Вт (режим пониженной мощности), либо на 12,5 Вт (по умолчанию, высокая мощность). • АИС для внутр. судоходства - эта опция позволяет выбирать между стандартным режимом работы АИС (СОЛАС) и режимом для внутреннего судоходства. • Настройки ГНСС - Внутренний приемник ГНСС можно настроить для работы в одном из следующих режимов 1)ГЛОНАСС и GPS (комбинированный режим, по умолчанию) 2)Только GPS 3)Только ГЛОНАСС АИС «OLEX» GPS «FURUNO GP-150» GP-150 требуется примерно 90 секунд после первоначального включения, чтобы определить свое местоположение. Впоследствии, это будет обычно занимать около 20 секунд. ПРЕДОСТЕРЕЖЕНИЕ Нажмите клавишу POWER. Прибор произведен проверку правильности работы PROGRAM MEMORY, SRAM и батареи и укажет на дисплее результаты. Если прибор имеет встроенный приемник маяков DGPS, в нижней части дисплея появится сообщение "BEACON RCVR INSTALLED". Прибор начнет работу в последнем использовавшемся режиме дисплея. После включения питания происходит следующее: Спустя 12 секунд после включения питания на дисплее появляется точная позиция (по широте и долготе). Если позицию определить не удается, в окне состояния приемника GPS появляется "NO FIX". Если значение PDOP (Снижение Точности Позиции) в режиме 3D превышает 6 или значение HDOP (Горизонтальное Снижение Точности) в режиме 2D превышает 4, появляется "DOP", чтобы указать на ненормальную обсервацию и индикация позиции не обновляется. Если сигнал спутника принимается нормально, появляется одно из приведенных в Таблице 1-1 сообщений, в зависимости от установок оборудования и состояния приемника GPS. Таблица 1-1 Индикация приемника GPS
Меню GPS Описание меню Fixmode Имеется два режима определения координат: 2D и 2/3D. Режим 2D дает двухмерное определение координат (только широта и долгота) и используется, если в поле зрения GPS- приемника имеются три спутника. Режим 2/3D автоматически переключается между двухмерным и трехмерным режимами, в зависимости от количества спутников (три или четыре) в поле зрения GPS-приемника. Disablesatellite Каждый GPS-спутник передает в Альманахе номера неисправных спутников. Используя эту информацию, GPS -приемник автоматически устраняет любой неисправный спутник из расписания GPS-спутников. Однако, иногда Альманах может не содержать эту информацию. В меню GPS SETUP вы можете вручную запретить неисправные спутники. GPSsmoothing, position Если DOP или условия приема неблагоприятны , GPS-координаты могут сильно "гулять" даже если судно неподвижно. Эти изменения можно уменьшить сглаживанием первичных GPS-координат. Возможна установка в пределах 0/9. Чем выше значение, тем больше сглаживаются первичные данные, однако, слишком большое значение замедляет обновление широты и долготы. Особенно заметно это при высокой скорости движения. Нормальная установка "0"; если наблюдается большой разброс показаний, увеличьте значение. GPSsmoothing, speed В процессе определения позиции скорость судна (величина и курс) непосредственно измеряются по принимаемым сигналам GPS-спутников. Первичные данные о скорости могут произвольно изменяться в зависимости от условий приема и других факторов. Вы можете уменьшить эту произвольные изменения, если увеличите сглаживание. Как и в случае со сглаживанием широты и долготы, чем больше сглаживание скорости и курса, тем более «плавные» данные вы будете иметь. Однако, если установка слишком высокая, изменения скорости и курса слишком замедляются. Если сглаживание не требуется, введите "О”. Для большинства случаев подходит "5". Speedaverage Расчеты Предполагаемого Времени Прибытия, времени Перехода и др. базируются на значении скорости, усредненном за указанный период. Стандартная установка - 1 минута. Geodeticdatum Выберите используемую вами картографическую систему. Непосредственно можно выбрать WGS-84 (стандартная картографическая система GPS) и NAD с7. Для других систем, выберите "OTHER" и введите значение по списку картографических стистем, приведенному в Приложении. Positionoffset К позиции, выдаваемой внутренним GPS-приемником, вы можете применить смещение, чтобы скомпенсировать различия между позицией по GPS у по вашей карте. Timedifference GPS-система использует время UTC (Всемирное Координированное). Если вы предпочитаете использовать местное время, введите разницу между UTC и местным временем. Для введения разницы позже или раньше UTG, используйте клавиши [+] и [-], соответственно. Position Введите позицию судна при холодном старте (в памяти отсутствует информация о спутниках) GPS-приемника чтобы ускорить получение координат. Точность должна быть в пределах 10 градусов. Включение эхолота «FURUNO FCV-1200L» Раздел 7 . Использование средств автоматической радиолокационной прокладки. Таблица А-П / 1-3 кодекса ПДНВ – 78 с поправками Примеры использования РЛС и САРП для расхождения судов в условиях ограниченной видимости с указанием даты,времени,района плавания и сделать анализ;
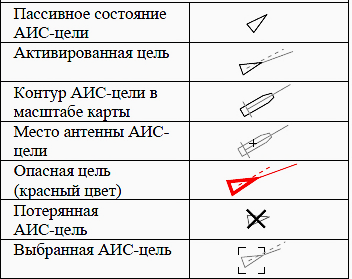
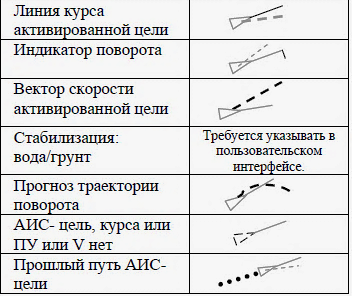
Стандартные символы и сокращения, применяемые в СА   Использование АИС при расхождении
  Несколько случаев при расхождении судами согласно МППСС-72; Меры принимавшиеся на судне при ухудшении видимости (конкретные меры); Решение не менее 2-ух задач на радиолокационном планшете по определению: ИК и скорости обнаруженных целей,дистанции кратайшего сближения (Дкр) и его (Ткр), маневра для расхождения с обнаруженными судами путем изменения своего курса (Кн) или скорости (Vн), или комбинированного маневра: Решение не менее 2-ух задач на расхождение с несколькими судами. Раздел 8. Подготовка к астрономическим наблюдениям . Измерители времени инструменты .Звездное небо. Порядок работы с секстантом, расчеты и измерения. Таблица А-П / 1-1 Кодекса ПДНВ – 78 Организация службы времени на судне Определение поправки хронометра (по сигналам точного времени, сличением) Раздел 9. Оформление прихода и отхода судна Правила прихода и отхода судна Раздел 10. Несение вахты в качестве дублера ВПК Индивидуальное задание на преддипломную практику по теме дипломной работы. Швартовное устройство: |