ЭСА лек.. Содержание введение датчики
 Скачать 1.19 Mb. Скачать 1.19 Mb.
|

|
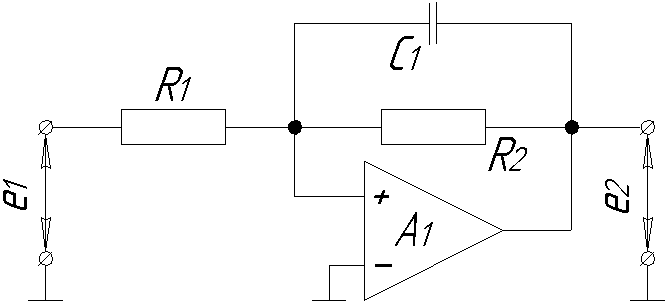
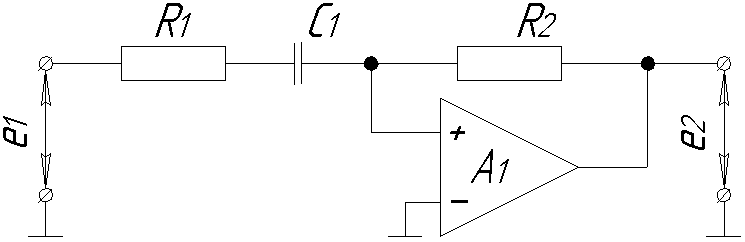
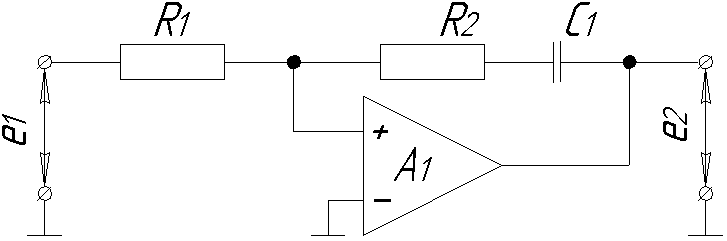
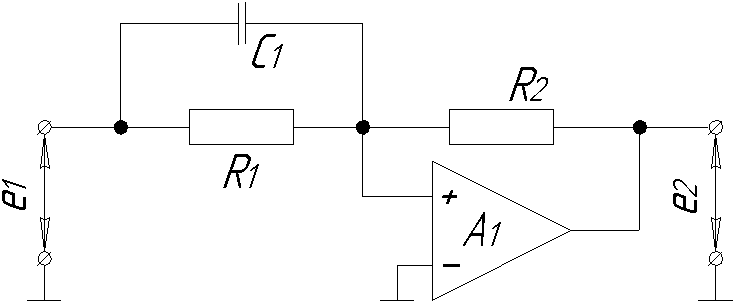
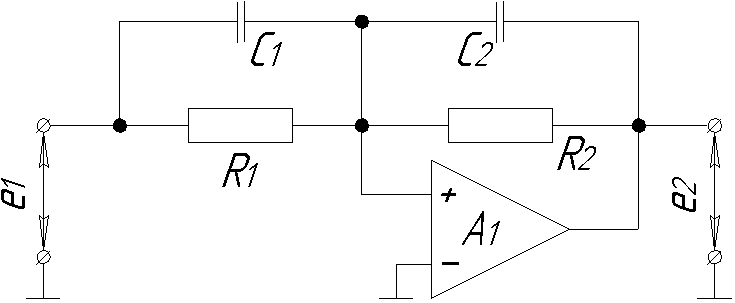
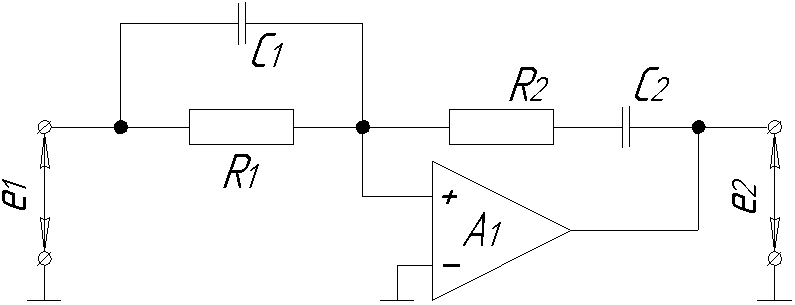
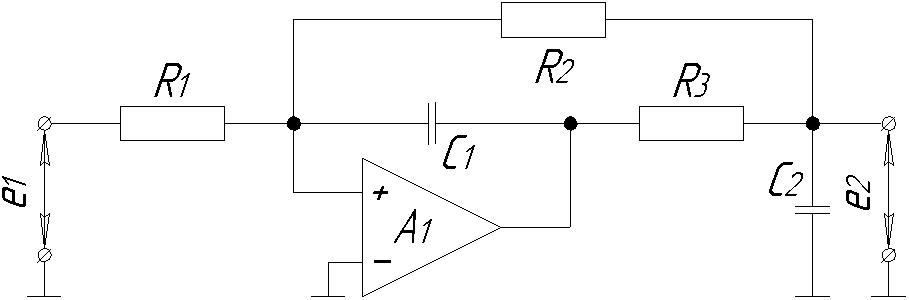
5.1. Назначение, классификация и общие характеристики Исполнительный элемент вырабатывает управляющее воздействие на регулирующий орган управляемого объекта (задвижку, клапан и т.д.) С помощью исполнительного элемента изменяется приток энергии или вещества к управляемому объекту, чтобы поддерживать его в заданном состоянии. По виду используемой энергии исполнительные элементы делят на: электрические, гидравлические, пневматические и комбинированные. Электрические исполнительные элементы Могут быть электромагнитными и электродвигательными. Простейшим электромагнитным исполнительным элементом является тяговый электромагнит (Рис. 57). При подаче напряжения Другими представителями электромагнитных исполнительных элементов является электромагнитная фрикционная муфта, применяемая в приводе швейных машин. Устройство и принцип действия ее поясняется рисунком 58.  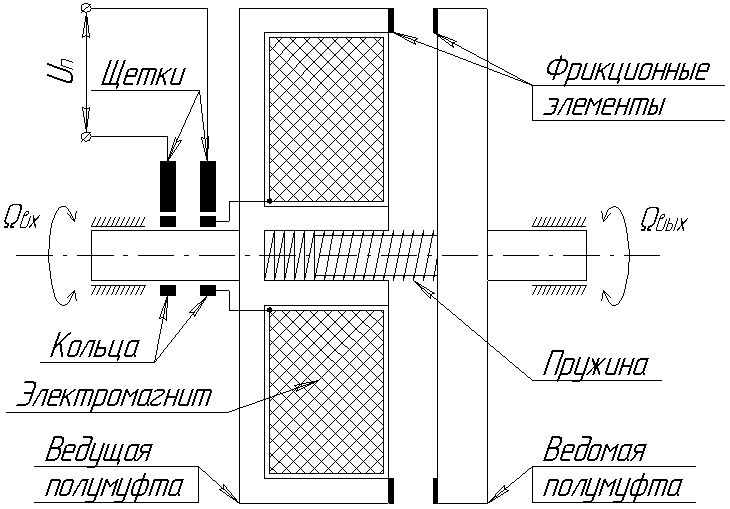 Рис. 58. «Электромагнитная фрикционная муфта» Рис. 57. «Тяговый электромагнит как исполнительный элемент» При подаче напряжения В электродвигательных исполнительных элементах регулирующий орган объекта перемещается маломощным реверсивным электродвигателем постоянного или переменного тока через редуктор с большим передаточным отношением. Исполнительные элементы обычно оборудуют тормозом для быстрой остановки, концевыми выключателями для отключения электродвигателя в крайних положениях регулирующего органа и реостатными или индуктивными преобразователями для преобразования углового перемещения в электрический сигал с целью дистанционного контроля положения регулирующего органа. Гидравлические и пневматические исполнительные элементы Бывают мембранные и поршневые. В мембранных исполнительных элементах перемещение регулирующего органа происходит за счет деформации упругой мембраны. При подводе давления 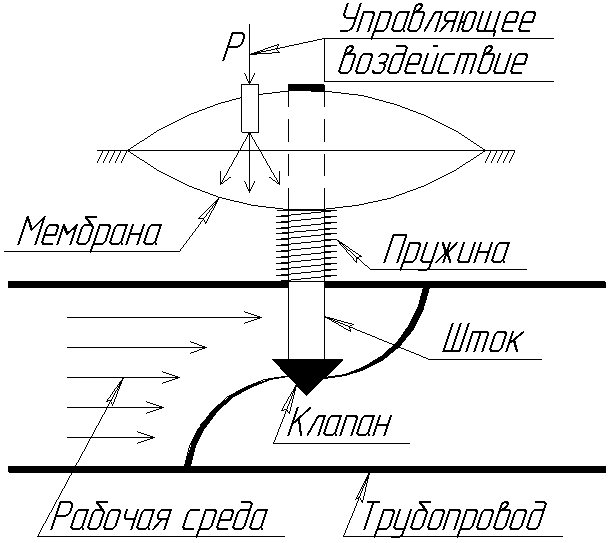 Рис. 59. «Мембранный исполнительный элемент» Поршневые исполнительные элементы бывают одностороннего (Рис. 60) и двухстороннего (Рис. 61) действия. 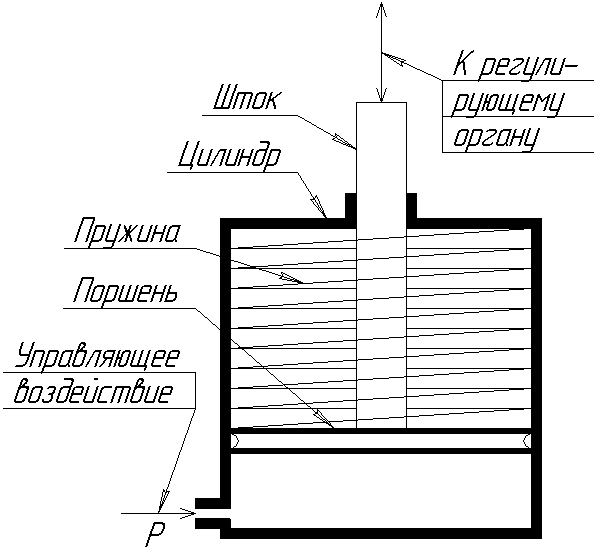 Рис. 60. «Поршневой исполнительный элемент одностороннего действия» При подаче давления В исходном состоянии клапаны b и с перекрыты двухбуртиковым золотником, поршень исполнительного элемента неподвижен. При смещении золотника вверх, верхняя полость исполнительного элемента соединяется с подводом рабочей среды по цепи ab, нижняя полость - со сливом по цепи cd. Поршень исполнительного элемента перемещается вниз. При перемещении золотника вниз нижняя полость цилиндра исполнительного элемента соединяется с подводом рабочей среды по цепи ас, а верхняя со сливом по цепи bе, поршень перемещается вверх. 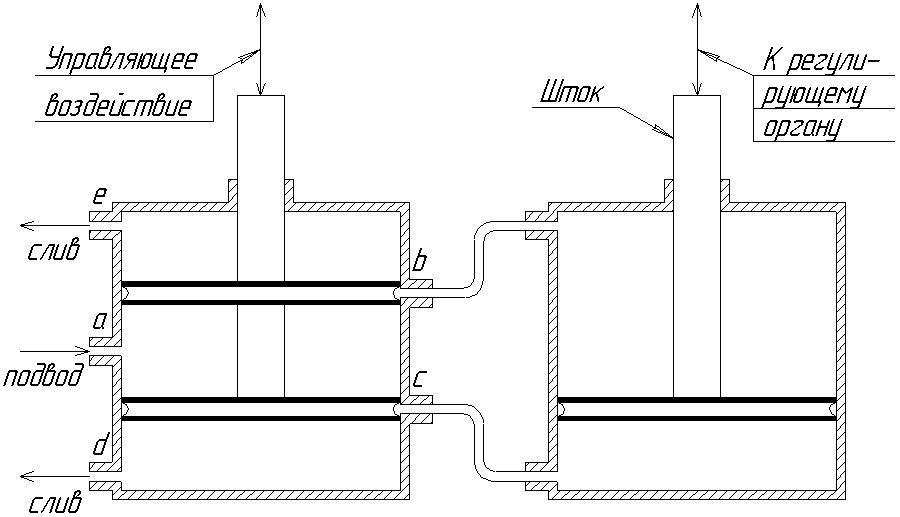 Рис. 61. «Поршневой исполнительный элемент двустороннего действия» 6. ВСПОМОГАТЕЛЬНЫЕ ЭЛЕМЕНТЫ АВТОМАТИКИ Задающие элементы Сравнивающие элементы Корректирующие элементы Применение корректирующих элементов в автоматике обусловлено необходимостью коррекции (создание желаемого режима работы) систем автоматического регулирования (САР). Как правило, такие устройства вводятся в САР непосредственно перед усилительным или исполнительным элементом и называются регуляторами. Обеспечивая, тем самым, требуемый режим устойчивости и/или ошибки регулирования. Корректирующие устройства систем автоматического регулирования по принципу действия разделяют на два вида: пассивные и активные. Как первые, так и вторые описываются различными типами дифференциальных уравнений (линейными и нелинейными). Аналитическое решение может быть найдено, как правило, только для линейных уравнений. Для нелинейных, решение может получиться громоздким или вообще отсутствовать. В последнем случае прибегают к методам численного интегрирования и использованием ЭВМ. Пассивные линейные корректирующие устройства Этот вид корректирующих устройств получил очень широкое распространение ввиду исключительной простоты реализации. В состав таких устройств входят: резисторы, конденсаторы и катушки индуктивности. По функциональному назначению они выполняют операции интегрирования и дифференцирования. Рассмотрим схему корректирующего устройства изображенную на рисунке 68.  Рис. 68. «Корректирующее устройство» Составим уравнения по законам Кирхгофа:  Исключив из системы уравнений величину тока Введем в это уравнение подстановку Из последнего уравнения видно, что данное устройство выполняет дифференцирование на низких частотах и интегрирование на высоких. При больших значениях Для нахождения передаточной функции корректирующего звена, воспользуемся операторным методом, согласно которому Передаточная функция, есть отношение напряжения на выходе к напряжению на входе устройства, преобразовав выражение, получим: В случае, когда требуется решение обратной задачи (нахождение схемного решения по желаемой передаточной характеристике корректирующего звена) можно воспользоваться справочным материалом [1], где приведены математические формулы передаточных функций и соответствующие им схемные реализации. Активные линейные корректирующие устройства К активным линейным корректирующим устройствам относятся такие К числу достоинств подобного рода корректирующих устройств можно отнести: их независимость от нагрузки, широкий диапазон изменения постоянных времени, высокую стабильность реализуемых ими дифференциальных уравнений. В таблице 7 приведены корректирующие устройства постоянного тока на операционных усилителях. Таблица 7. «Активные линейные корректирующие устройства»
Нелинейные пассивные корректирующие устройства Возможности линейных корректирующих устройств в системах автоматического регулирования, имеющих в своем составе нелинейности, ограничены и не могут обеспечить требуемого качества переходного процесса и высокой динамической точности. Введение нелинейных корректирующих устройств уменьшает влияние помех (шумов). Позволяют в большинстве случаев сократить время переходного процесса и повысить качество регулирования. Используются такие виды нелинейных корректирующих устройств: Псевдолинейные четырехполюсники. Обеспечивают в системах управления либо изменение фазы при неизменной амплитуде, либо изменение амплитуды при неизменной фазе. Они состоят из двух ветвей, сигналы с которых подаются на блок умножения (Рис. 69). В цепи сигналов могут включаться линейные 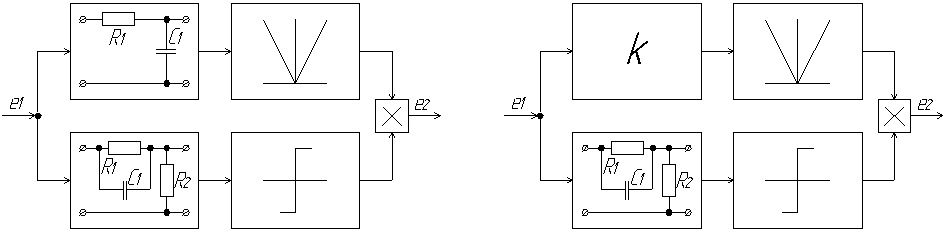 Рис. 69. «Псевдолинейные четырехполюсники» Нелинейные четырехполюсники. Образуются путем введения нелинейного элемента между двумя пассивными  Рис. 70. «Схемы нелинейных четырехполюсников» Нелинейные активные корректирующие устройства Нелинейные активные корректирующие устройства, получившие наибольшее распространение, бывают двух видов: нелинейные четырехполюсники, у которых нелинейный блок реализуется на диодах с включением операционных усилителей (Рис. 71); нелинейные блоки с перестройкой коэффициента усиления или их структуры (Рис. 72,а). В схемах с перестройкой коэффициента усиления схема работает в двух режимах. Коэффициент усиления в режиме набора скорости реализуется по ветви 1 (Рис. 72,б), а в режиме торможения по ветви 2. Под участком набора скорости понимают такой участок переходного процесса, где скорость и ускорение имеют одинаковый знак. На участке торможения знаки скорости и ускорения различны. Переключение нелинейного блока коэффициента усиления осуществляется дискриминатором, который реагирует на знаки сигналов скорости и ускорения. 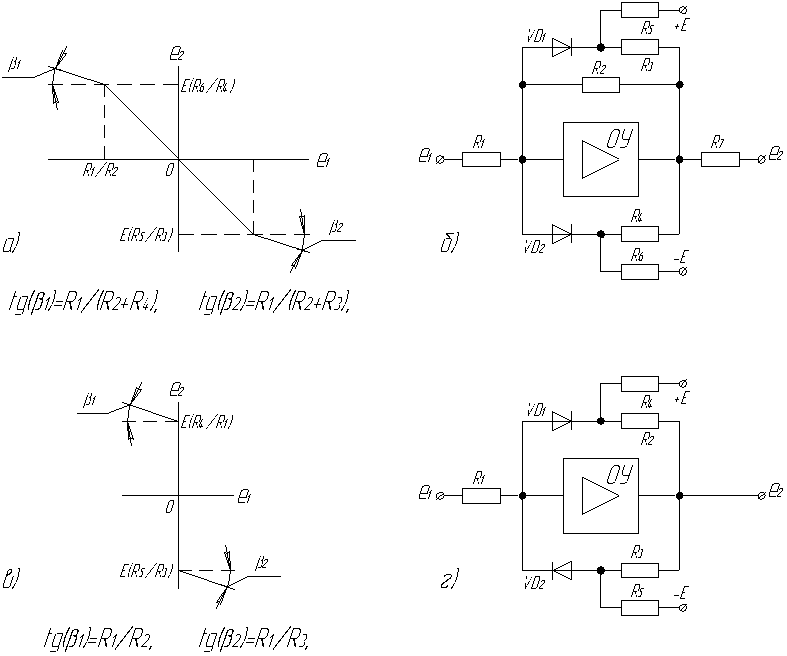 Рис. 71. «Реализация нелинейности с помощью диодов и ОУ: а) нелинейность типа насыщение; б) схема ее реализации; в) нелинейность типа релейной характеристики; г) схема ее реализации» 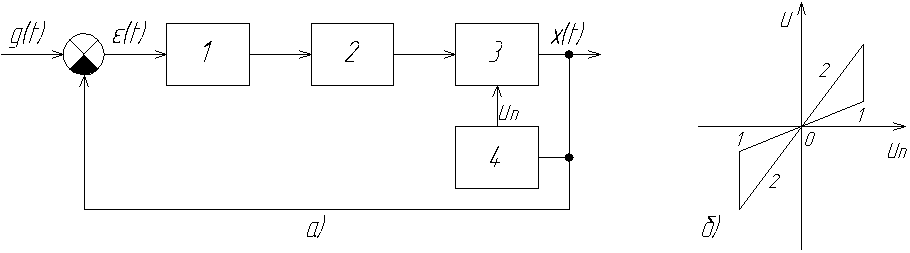 Рис. 72. «Система с перестройкой коэффициента усиления: а) блок-схема; б) характеристика нелинейного элемента» Блок-схема системы с изменяемой структурой и нелинейным логическим блоком переключения приведена на рисунке 73. После сельсинной сравнивающей схемы 1 включено нелинейное корректирующее устройство 2, которое изменяет свою структуру в зависимости от сигнала логического блока 3. Логический блок получает сигналы с выхода усилителя мощности 4  Рис. 73. «Система с перестраиваемой структурой» |