ЭСА лек.. Содержание введение датчики
 Скачать 1.19 Mb. Скачать 1.19 Mb.
|

|
Емкостные Представляют собой электрический конденсатор, одна из обкладок (пластин) которого выполнена подвижной и перемещается под действием контролируемого объекта. Емкость где: При перемещении одной пластины относительно другой изменяются 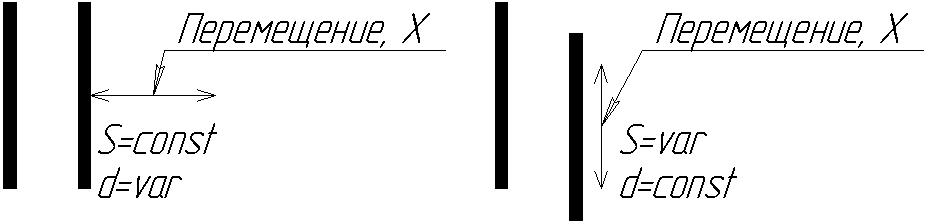 Рис. 8. «Варианты контроля перемещения емкостным датчиком» и по закону Ома - ток цепи где: 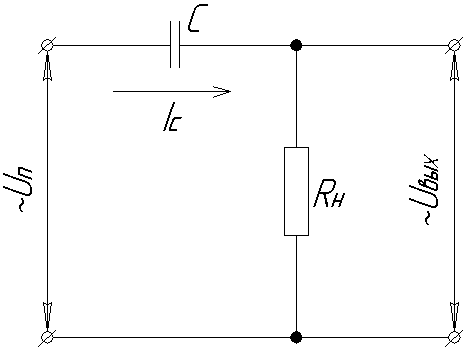 Рис. 9. «Электрическая схема включения емкостного датчика» Цепь преобразований в этом случае выглядит следующим образом: На практике обычно используют более сложную, но и более совершенную мостовую измерительную схему, варианты которой будут рассмотрены позднее. Емкостный датчик часто включают также в качестве элемента колебательного контура электронного L-C генератора электрических колебаний ЭГ (рис. 10). 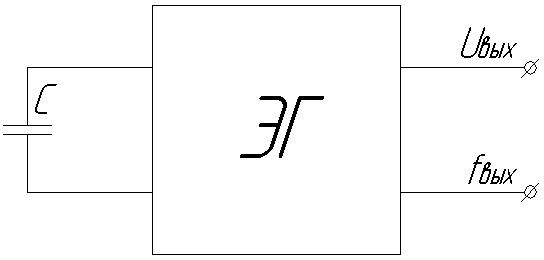 Рис. 10. «Емкостный датчик с преобразованием перемещения в частоту электрических колебаний» В этом случае при изменении емкости где: Помимо контроля перемещений емкостные датчики применяются для контроля других физических величин, изменяющих диэлектрическую постоянную Достоинства емкостных датчиков: 1. Простота устройства. 2. Надежность в работе (датчик бесконтактный). 3. Высокая чувствительность. 4. Малая инерционность. 5. Малое обратное воздействие датчика на контролируемый объект. Основной недостаток: Малая выходная мощность. Связано это с тем, что емкость воздушного конденсатора приемлемых размеров мала и на промышленной частоте В результате возникает необходимость усиления выходного сигнала, либо питание датчика от специального источника напряжения повышенной частоты для уменьшения величины емкостного сопротивления конденсатора. Но это усложняет в целом устройство контроля перемещения с использованием емкостного датчика. Рассмотренные реостатные, индуктивные и емкостные датчики перемещения относятся к аналоговым параметрическим, т.к. в них под действием контролируемой величины (перемещения) изменяется параметр электрической цепи – соответственно активное, индуктивное или емкостное сопротивление. Дискретные фотоэлектрические датчики Обеспечивают высокую точность контроля с преобразованием перемещения в двоичный код. Примерами таких датчиков являются фотоэлектрические с шифраторами положения и приращения. Датчик угла поворота с шифратором положения Основу датчика составляет кодирующий диск КД, соединенный с контролируемым валом, с системой концентрических прорезей или полосок, нанесенных фотоспособом (рис. 11).  Рис. 11. «Фотоэлектрический датчик углового перемещения с шифратором положения» По одну сторону от КД расположен осветитель ОС, по другую – набор фотоприемников по числу групп концентрических полосок N. Различным угловым положениям диска соответствуют различные комбинации засвеченных и затемненных фотоприемников общим количеством 2N. На выходе засвеченного фотоприемника формируется высокий уровень напряжения (1), не засвеченного – низкий (0). Таким образом, угол поворота «α» преобразуется в позиционный N-разрядный двоичный код с шагом квантования: Так, при Для повышения точности контроля увеличивают число групп концентрических полосок. Например, при Использование обычного (позиционного) двоичного кода может приводить к сбоям при переходе с одного уровня квантования на другой при одновременных изменениях в нескольких разрядах. Для устранения этого явления применяют помехоустойчивые двоичные коды, например, код Грея (таблица 1), в котором переход к очередному уровню квантования сопровождается изменением только в одном двоичном разряде, и погрешность не может превышать единицы младшего разряда. Помимо фотоэлектрического в дискретных датчиках перемещения применяют также контактный, электромагнитный и емкостный методы съема информации с кодирующего диска. Таблица 1. «Варианты двоичных кодов»
Датчик угла поворота с шифратором приращения В датчике используется непрозрачный кодирующий диск КД, соединенный с контролируемым валом. По одну сторону расположен осветитель ОС, по другую – три фотоприемника Ф1, Ф2, Ф3. На диске, напротив Ф1 и Ф2 расположены две кольцевые полоски с чередующимися прозрачными и непрозрачными сегментами, причем сегменты на второй дорожке сдвинуты на полшага (рис. 12). 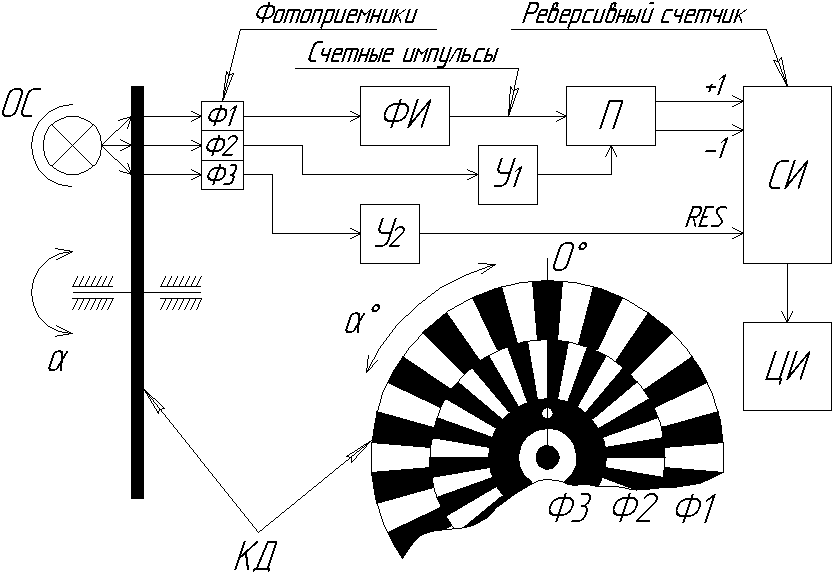 Рис. 12. «Фотоэлектрический датчик углового перемещения с шифратором приращения» Напротив фотоприемника Ф3 в исходном состоянии (угол поворота При повороте диска по часовой стрелке в моменты засветки Ф1 формирователем импульса ФИ вырабатываются счетные импульсы. В эти моменты времени Ф2 засвечен, напряжением При повороте диска в противоположном направлении в моменты засветки Ф1 (формирование счетных импульсов) Ф2 затемнен, и счетные импульсы через переключатель П поступают на вычитающий (-1) вход СИ, а показания ЦИ уменьшаются. При возврате диска в исходное состояние ( Шаг квантования Сельсины Устройство и принцип действия Сельсин (самосинхронизирующийся) - это маломощная электрическая машина с возбуждением от однофазной сети переменного тока. Сельсины делятся на контактные и бесконтактные. Контактные сельсины изготавливают в двух конструктивных вариантах: а) с однофазной обмоткой на статоре с явно выраженными полюсами и трехфазной обмоткой на роторе с неявно выраженными полюсами (рис. 13,а); б) с однофазной обмоткой на роторе с явно выраженными полюсами и трехфазной обмоткой на статоре с неявно выраженными полюсами (рис. 13,б). 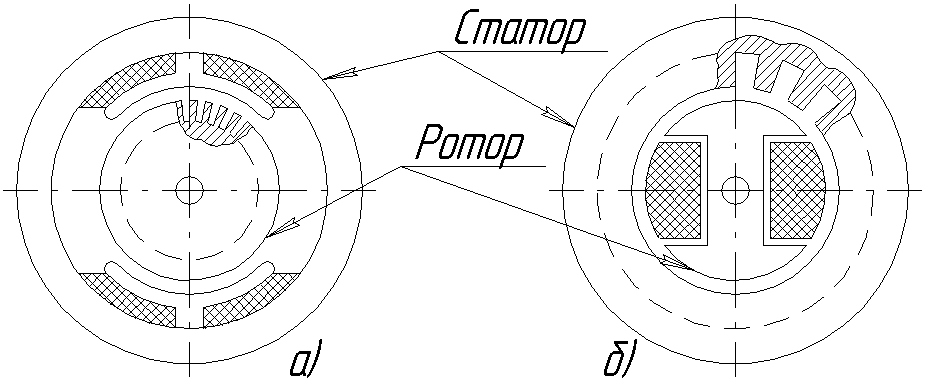 Рис. 13 «Варианты конструктивного исполнения сельсинов» Обмотка ротора выводится на контактные кольца для соединения с внешней схемой. В бесконтактных сельсинах и одно- и трехфазная обмотки размещены на статоре. При повороте ферромагнитного ротора специальной формы изменяется степень магнитной связи между однофазной и секциями трехфазной обмотки. Электрическая схема сельсина приведена на рис. 14. 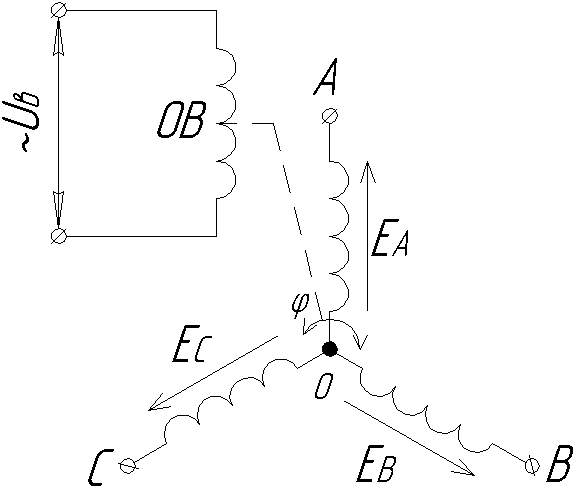 Рис. 14. «Электрическая схема сельсина» Под действием напряжения возбуждения Сельсин как датчик углового перемещения Ротор сельсина соединяют с контролируемым валом. Выходное напряжение, зависящее от угла поворота ротора Индикаторная схема включения сельсинов Используют два сельсина: сельсин-датчик СД и сельсин-приемник СП (рис. 15). 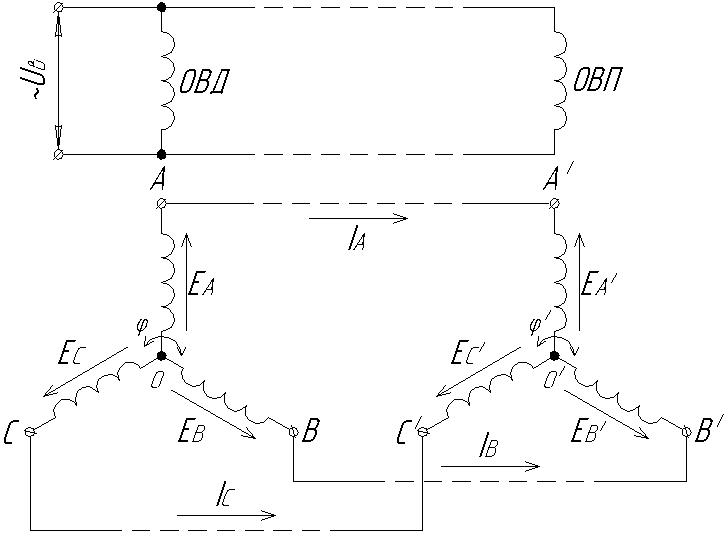 Рис. 15. «Индикаторная схема включения сельсинов» На обмотки возбуждения сельсина-датчика и сельсина-приемника, ОВД и ОВП соответственно, подается напряжение возбуждения При одинаковом положении роторов ЭДС, наводимые в трехфазных обмотках СД и СП, одинаковы: где: Индикаторную схему включения сельсинов применяют: 1) Для дистанционного контроля углового положения какого-либо вала. Ротор СД соединяют с контролируемым валом, а СП устанавливают на щите оператора, соединив ротор СП со стрелкой отсчетного устройства; 2) Для дистанционного поворота маломощного вала на заданный угол. При этом СД устанавливают на пульте управления, а ротор СП соединяют с указанным валом. Трансформаторная схема включения сельсинов В отличие от индикаторной схемы напряжение возбуждения Под действием переменных ЭДС Для удобства обычно создают начальное рассогласование роторов на 900, при этом:  Рис. 16. «Трансформаторная схема включения сельсинов» Трансформаторную схему включения сельсинов обычно применяют в системах дистанционного поворота мощного вала на заданный угол (в следящих системах). В этом случае напряжение При угле рассогласования Таким образом, силовой вал отслеживает перемещение ротора СД, т.е. поворачивается на такой же угол и в ту же сторону. Датчики положения Служат для контроля пространственного положения объектов (электровозы, вагонетки, подъемные сосуды, задвижки, ограждающие решетки и т.д.). Относятся к дискретным датчикам. Выходная величина «Y» изменяется скачкообразно при определенном положении контролируемого объекта. Рассмотрим основные разновидности датчиков положения. Электроконтактные В определенном положении контролируемый объект воздействует на толкатель, который замыкает или размыкает контакты в электрической цепи. Такие датчики называют концевыми или путевыми выключателями, а в малогабаритном исполнении – микропереключателями (Рис. 17). 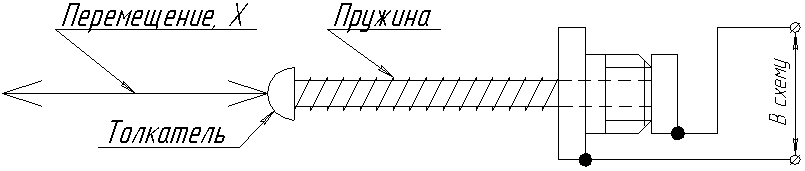 Рис. 17. «Электроконтактный концевой выключатель» Достоинства: 1. Широкий диапазон коммутируемых мощностей; 2. Возможность одновременного переключения контактов в различных электрических цепях. Недостаток: Пониженная надежность из-за износа и подгорания контактов. Золотниковые Являются гидравлическими или пневматическими аналогами электроконтактных датчиков. При определенном положении контролируемый объект через шток смещает золотник, соединяя через кольцевую проточку входное отверстие в теле цилиндра с выходным, в результате чего у датчика резко возрастает давление 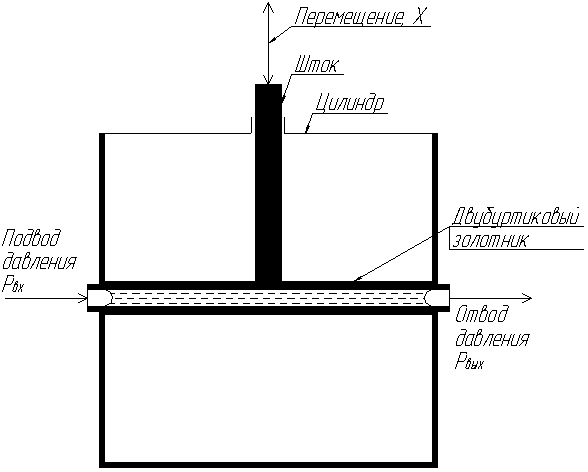 Рис. 18. «Золотниковый датчик положения» Герконовые Основу датчиков составляет геркон (герметичный контакт) - гибкие ферромагнитные пластинки, помещенные в стеклянную капсулу, заполненную инертным газом. 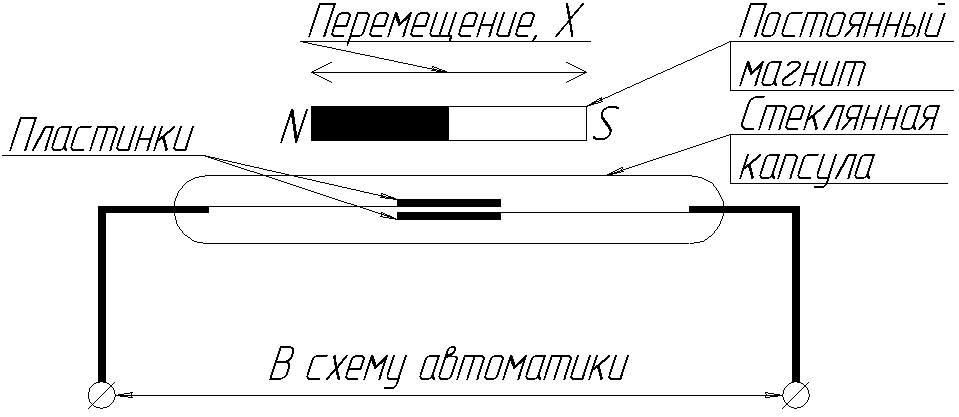 Рис. 19. «Герконовый датчик положения» Контролируемый объект перемещает постоянный магнит, который при определенном положении объекта воздействует на пластинки, замыкая или размыкая электрическую цепь. Возможен вариант конструктивного исполнения датчика, когда постоянный магнит неподвижен, а перемещается ферромагнитная шторка (экран) между магнитом и герконом. При смещении шторки контролируемым объектом постоянный магнит воздействует на пластинки, вызывая их замыкание. Достоинства герконовых датчиков: 1. Малые размеры; 2. Низкая стоимость; 3. Высокая надежность, долговечность. Недостаток: Ограниченный набор контактов. Пример применения - датчик КСЛ-2 контроля схода в сторону рабочего органа ленточного конвейера. Автогенераторные Основу датчика составляет генератор электрических колебаний ЭГ (электронный усилитель с сильной трансформаторной, положительной обратной связью).  Рис. 20. «Автогенераторный датчик положения» При появлении экрана между первичной I и вторичной II обмотками трансформатора снижается интенсивность обратной связи, что приводит к срыву колебаний генератора и скачкообразному изменению выходного напряжения Индуктивные Применяют как дроссельные, так и трансформаторные варианты датчиков. Принцип их действия аналогичен датчикам контроля перемещения (Рис. 5-7), но функции подвижной части – якоря выполняет контролируемый ферромагнитный объект, например, подъемный сосуд. При подходе его к датчику происходит резкий перепад выходной электрической величины (снижение тока в дроссельном датчике, рост выходного напряжения в трансформаторной схеме). Радиационные Используют различные виды излучений (радиоактивное, световое, тепловое, радиоволновое, ультразвуковое). Устройства контроля положения на базе этих датчиков содержат излучатель и приемник излучения. При появлении контролируемого объекта между излучателем и приемником резко снижается уровень излучения в зоне установки приемника. В качестве примера на рис. 21 показано применение γ-электронного реле для контроля заполнения породных бункеров на автоматизированных шахтных подъемных установках. При полной загрузке бункера, благодаря значительному поглощению радиоактивного γ-излучения контролируемым материалом, резко снижается уровень излучения в зоне установки приемника. Достоинство данного технического решения – высокая надежность при работе в условиях высокой запыленности и влажности. Недостаток – опасность радиоактивного облучения обслуживающего персонала. 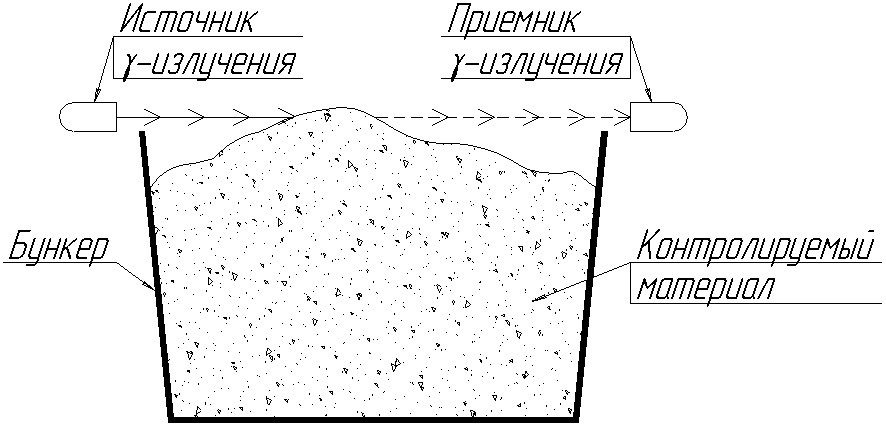 Рис. 21. «Контроль положения с использованием датчика радиоактивного излучения» На рис. 22 показан вариант контроля положения объекта с использованием направленного светового излучения. Контролируемый объект в определенном пространственном положении перекрывает световой поток, вызывая резкий перепад выходного напряжения приемника излучения. 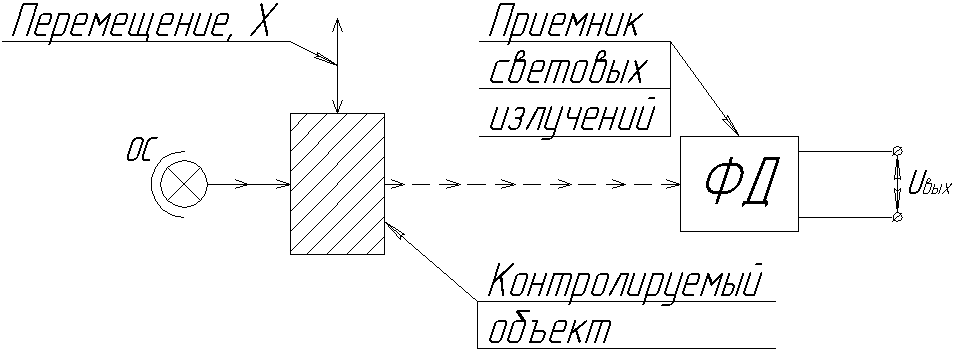 Рис. 22 «Контроль положения с использованием датчика светового излучения» На рис. 23 приведен пример контроля положения крупных ферромагнитных объектов, например, электровозов, вагонеток с использованием радиоволнового (электромагнитного) излучения. На одной стенке выработки размещен электронный генератор импульсов 1 с передающей антенной 2, а на другой стенке – приемная антенна 3 с блоком формирования выходного напряжения  Рис. 23. «Контроль положения объектов с использованием радиоволнового излучения» При отсутствии объекта в зоне контроля электромагнитное излучение принимается антенной 3. Для повышения надежности работы, защиты от индустриальных помех выходное напряжение а) уровень сигнала в приемной антенне выше определенной величины; б) принятый импульсный сигнал совпадает по времени с импульсами электронного генератора. При появлении ферромагнитного объекта в зоне установки устройства он экранирует приемник от источника излучения, что приводит к исчезновению выходного напряжения. На таком принципе работают датчики (устройства) контроля положения ДКП-М, УКП, применяемые на угольных шахтах. Датчики угловой частоты вращения |