Совершенствование систем обеспечения безопасности движения поезд. Совершенствование систем обеспечения безопасности движения поездов
 Скачать 6.75 Mb. Скачать 6.75 Mb.
|

ТСКБМПринцип оценки уровня бодрствования машиниста Из основ физиологии человека известно, что уровень бодрствования человека сопровождается сигналом кожно-гальванической реакции (сигнал КГР). Сигнал КГР представляет собой спонтанное кратковременное повышение проводимости кожи с последующим возвратом к исходному уровню. Сигнал КГР регистрируется путем измерения относительного приращения сопротивления кожи и имеет форму импульсов треугольной формы со специфической асимметрией: в виде крутого переднего и полого заднего фронта. Схематическое изображение импульса КГР и типичные параметры приведены на рисунке 4. Носителем информации об уровне бодрствования является ТКГР – время между импульсами КГР – у засыпающего человека увеличивается интервал времени между импульсами КГР. Несмотря на случайную природу, импульс КГР хорошо распознается. В системе ТСКБМ реализовано преобразование сигнала КГР в цифровую форму с помощью соответствующих программ, выделение количественных показателей сигнала КГР, отображение этих показателей в условный уровень бодрствования. 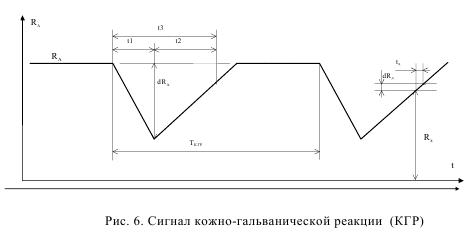 Рисунок 4. – Сигнал кожно-гальванической реакции (КГР) RA = 50…500 кОм – базовое сопротивление, относительно которого регистрируется импульс КГР; dRA = 2,5…50 кОм – приращение сопротивления за время нарастания импульса КГР; dRA/RA = 5…10% - амплитуда импульса КГР; t1 = 1…3 с – длительность нарастания импульса КГР; t2 = 1…10 – длительность убывания импульса КГР; ТКГР = 20…60 с – интервал следования импульсов КГР; Rx = 5 кОм … 12,5 Мом – текущее значение сопротивления. Rx = 5 кОм ... 12,5 Мом – текущее значение сопротивления. Система ТСКБМ непрерывно осуществляет контроль и индикацию уровня бодрствования машиниста по условной шкале, а также приводит в действие механизм экстренного торможения при снижении уровня бодрствования ниже некоторого критического. Машинисту дается возможность до трех раз отодвинуть момент торможения, нажимая на рукоятку бдительности по свистку электропневматического клапана. Если машинист в течение этого времени повысит свой уровень бодрствования, то экстренного торможения не произойдет. Критический уровень бодрствования не связан с потерей работоспособности. Из соображений безопасности и с учетом индивидуального разброса физиологических параметров машинистов критический уровень бодрствования зафиксирован вблизи границы работоспособного состояния. Классическая система контроля бдительности, интегрированная с комплектом АЛСН на локомотиве, действовала следующим образом. При приёме кода З бдительность не проверялась, а скорость практически не ограничивалась (или ограничивалась на уровне установленной скорости или несколько выше). При любой смене сигнала на менее разрешающий, происходила однократная проверка бдительности. При движении при приёме кода Ж происходила частая периодическая (через 15-20 с) проверка бдительности в случае, если скорость движения превышала порог, обычно 60 км/ч. При приёме кода КЖ происходила частая периодическая проверка бдительности при любой скорости движения, а при скорости выше порога (60 км/ч) происходило безусловное экстренное торможение. Таким образом, фактически запрещено проезжать жёлтый сигнал со скоростью более 60 км/ч. При переключении локомотивного светофора на красный огонь (например, при проезде закрытого сигнала) также происходила частая периодическая проверка бдительности, а при превышении скорости около 20 км/ч - безусловное экстренное торможение. При неподтверждении машинистом бдительности через 6–7с также выполнялось экстренное торможение. Более современные системы контроля бдительности используют более сложные алгоритмы работы, отличающиеся использованием разных световых и звуковых сигналов для проверки бдительности, числом и расположением кнопок и рукояток подтверждения бдительности, но в целом выполняют ту же задачу, и контролируют те же самые скорости. Функциональные схемы устройств ТСКБМФункциональная схема ТСКБМ представлена на рисунке 5 и включает в себя следующие приборы и блоки. Прибор ТСКБМ-Н, носимая часть системы, представляет собой телеметрический датчик и располагается на запястье машиниста. Прибор ТСКБМ-Н предназначен для получения информации об относительном изменении электрического сопротивления, подключенного к его электродам, и передачи ее по радиоканалу в цифровом виде на приемник прибора ТСКБМ-П. Прибор ТСКБМ-П приемник сигналов прибора ТСКБМ-Н и устройство индикации, предназначен для приема и первичной обработки информации, передаваемой по радиоканалу от ТСКБМ-Н, и передачи ее в контроллер ТСКБМ-К. Устройство индикации предназначено для визуального отображения уровня бодрствования машиниста на светодиодном индикаторе. Блок ТСКБМ-К контроллер системы предназначен для приема и обработки информации от приемника и рукоятки бдительности, а также для выдачи управляющего воздействия на электропневмоклапан (при подключении АЛСН) или систему КЛУБ. 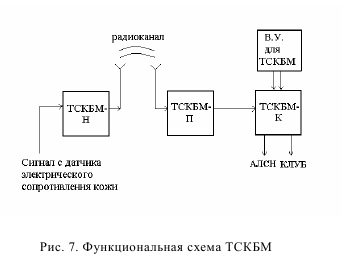 Рисунок 5. – Функциональная схема ТСКБМ. Рассмотрим далее работу основных блоков ТСКБМ. Телеметрический датчик предназначен для получения информации об относительном изменении сопротивления, подключенного к его электродам, преобразования этой информации в кодовые посылки и передачу их по радиоканалу на подсистему обработки сигналов телеметрического датчика функциональная схема прибора приведена на рисунке 6. На электроды ТСКБМ-Н подается напряжение до 0.3 В и измеряя текущий между электродами ток, схема получает информацию о величине электрического сопротивления кожи машиниста. Измерения производятся однобитовым последовательным аналого-цифровым преобразователем (дельта АЦП). Сигнал с датчика проходит через логарифмический преобразователь. Прибор работает в двух режимах измерения сопротивления и самотестирования. Измерение проводятся в течение 64 секунд, самотестирование – 1 секунды. Этот процесс периодически повторяется. Во время тестирования моделируется изменение сопротивления путем замыкания электродов и обрыва электродов. В рабочем режиме схема тестирования подключает электроды к логарифмическому преобразователю. Сигнал с логарифмического преобразователя подается через усилитель, собранный на микросхеме D1 и D2, на дельте – АЦП, а также на схему индикации отсоединения электродов, собранную на микросхеме D2.2., которая вырабатывает сигнал, если сопротивление между электродами существенно больше 13 МОм. Он участвует в формировании выходной посылки, идущей на передатчик, выполненный на элементах VT4, L1, C7, R14 и через антенну излучаемой на приемник прибора ТСКБМ-П, находящегося в кабине машиниста. Он, в свою очередь, выдает индикационный сигнал, свидетельствующий, что прибор ТСКБМ-Н находится в нерабочем состоянии. Приемник сигналов телеметрического датчика предназначен для приема сигналов телеметрического датчика по радиоканалу, его предварительной обработки и выдачи по запросу в блок контроллера системы. Кроме того, приемник обнаруживает присутствие второго работающего телеметрического датчика в зоне действия системы и информирует об этом контроллер системы. Устройство индикации предназначено для визуального отображения уровня бодрствования машиниста на светодиодном индикаторе и контроля исправности индикатора. Функциональная схема прибора ТСКБМ-П приведена на рис. 8. Прибор ТСКБМ-П состоит из двух независимых устройств – приемника сигналов телеметрического датчика и устройства индикации. Приемник сигналов телеметрического датчика принимает импульсно-модулированные высокочастотные сигналы по двум независимым каналам с взаимно-ортогональной поляризацией приемных антенн. После усиления, детектирования и нормирования по амплитуде входной сигнал канала поступает на вход канального коррелятора. С выхода корреляторов цифровые значения корреляционной функции входного сигнала подаются на вход узла предварительной обработки информации телеметрического датчика. Канал для обработки текущей посылки телеметрического датчика выбирается по максимальному значению корреляционной функции на интервале стартового бита посылки. По запросу контроллера системы пятиразрядный информационный код, представляющий собой сумму минус единица значений информационных бит за 32 посылки (если сумма равна нулю, то единица не вычитается), вместе с признаками тестирования и ошибки подается на выход прибора. 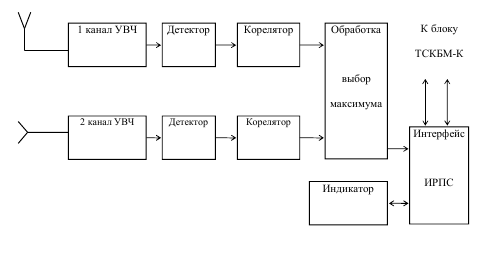 Рисунок 6. - Функциональная схема прибора ТСКБМ-П На вход устройства индикации поступает код состояния светодиодного индикатора из контроллера ТСКБМ-К. Узел управления индикатором зажигает необходимое число светодиодов, проверяет текущее состояние индикатора и посылает на выход прибора код текущего состояния индикатора. Прибор ТСКБМ-П, являясь составной частью системы контроля бодрствования машиниста, связан радиоканалом с источником телеметрических сигналов о физическом состоянии машиниста –прибором ТСКБМ-Н и каналом связи типа ИРПС (токовая петля) с блоком контроллера ТСКБМ-К. Питание прибора ТСКБМ-П осуществляется от внутреннего источника питания блока ТСКБМ-К. Приемник накапливает информацию от прибора ТСКБМ-Н в течение 32 последовательных посылок и формирует выходной байт данных. В байте данных, передаваемых по токовой петле в контроллер, первый бит равен второму биту кодовой посылки прибора ТСКБМ-Н, второй бит равен четвертому биту последней кодовой посылки прибора ТСКБМ-Н, биты с третьего по седьмой представляют сумму всех предшествующих 32 кодовых посылок прибора ТСКБМ-Н минус единица. Если сумма равна нулю, то передается нуль. Восьмой бит равен единице в случае повторной посылки байта информации в блок контроллера и нулю в случае посылки нового байта информации. Приемник также принимает решение о наличии или отсутствии в зоне приема второго работающего прибора ТСКБМ-Н и определяет степень устойчивости работы радиоканала связи. При наличии второго работающего прибора ТСКБМ-Н или неустойчивой работе радиоканала первый бит выходного байта данных равен единице. Контроллер готов к приему информации от приемника при отсутствии в цепи запроса тока (логический нуль). Длительность сигнала запроса составляет не менее 3 мс. При появлении этого сигнала приемник прибора ТСКБМ-П передает один байт предварительно обработанной в нем информации по информационной цепи канала связи. Интервал следования сигналов запроса равен 100–200 мс. В свою очередь, получив обработанную в приемнике информацию, контроллер принимает решение о состоянии машиниста и по второму каналу связи с прибором ТСКБМ-П типа ИРПС (токовая петля) выдает два байта или три байта данных на устройство индикации данного прибора. В этих байтах содержится информация о включении или выключении элементов индикации. На устройстве индикации визуально отображается уровень бодрствования машиниста в виде линейки горящих светодиодов желтого цвета. Большее число горящих светодиодов соответствует более активному состоянию машиниста. В случае снижения внимания машиниста до опасного уровня, контроллер принимает решение о включении индикатора красного цвета. Контроллер системы предназначен для обработки информации телеметрического датчика системы, поступающей из приемника блока ТСКБМ-П, определения уровня бодрствования машиниста в соответствии с заложенным вычислительным алгоритмом, управления устройством индикации блока ТСКБМ-П, управления электропневмоклапаном ЭПК (при работе с системой АЛСН), выдачи информации о снижении уровня бодрствования ниже критического (при работе с системой КЛУБ) и контроля состояния системы. Функционально контроллер системы может быть разделен на следующие части: Устройство цифровой обработки (УЦО). Источник питания (ВИП). Блок внешних соединений (БВС-ТСКБМК). Усилитель ЭПК (УЭПК). В устройстве цифровой обработки выполняется вся логическая обработка информации, поступающей на контроллер, и вырабатываются все выходные воздействия. Вторичный источник питания обеспечивает преобразование постоянного напряжения аккумуляторной батареи в несколько постоянных стабилизированных выходных напряжений. Контроллер системы предназначен для обработки информации телеметрического датчика системы, поступающей из приемника блока ТСКБМ-П, определения уровня бодрствования машиниста в соответствии с заложенным вычислительным алгоритмом, управления устройством индикации блока ТСКБМ-П, управления электропневмоклапаном ЭПК (при работе с системой АЛСН), выдачи информации о снижении уровня бодрствования ниже критического (при работе с системой КЛУБ) и контроля состояния системы. Функционально контроллер системы может быть разделен на следующие части: Устройство цифровой обработки (УЦО). Источник питания (ВИП). Блок внешних соединений (БВС-ТСКБМК). Усилитель ЭПК (УЭПК). В устройстве цифровой обработки выполняется вся логическая обработка информации, поступающей на контроллер, и вырабатываются все выходные воздействия. Вторичный источник питания обеспечивает преобразование постоянного напряжения аккумуляторной батареи в несколько постоянных стабилизированных выходных напряжений. Блок внешних соединений для подключения внешних устройств и ввода питания. Кроме того в блоке расположены индикаторы для контроля включенного состояния, фильтры питания, усилитель ЭПК, блок коммутации, плата ограничителей напряжений. Усилитель ЭПК (УЭПК) предназначен для преобразования сигнала управления ЭПК из динамического слаботочного сигнала с частотой 44 кГц в сигнал постоянного тока для питания реле блока коммутации, расположенного в блоке внешних соединений при работе без системы КЛУБ, или для подачи на вход ТСКБМ системы КЛУБ при работе с этой системой. |