Волков Строительные машины. Среднее профессиональное образование
 Скачать 5.2 Mb. Скачать 5.2 Mb.
|

|
Гусеничное ходовое оборудование применяют для передвижения по бездорожью, а также в машинах, для которых передвижение не является основной операцией как, например, в одноковшовых экскаваторах, где оно используется, в основном, для передвижения экскаватора на новую рабочую позицию в пределах одной и той же рабочей площадки. Для передвижения таких машин на большие расстояния обычно используют тягачи со специальными прицепами-трейлерами. Шинноколесное ходовое оборудование устанавливают на машинах, для которых транспортная операция занимает соизмеримую с другими операциями часть технологического цикла, как, например, у самоходных скреперов, перемещающих грунт в своем ковше на расстояния в несколько километров. Такой же вид ходового оборудования имеют машины, часто меняющие рабочие площадки, отстоящие одна от другой на значительных расстояниях. Особенностью такого вида ходового оборудования является возможность реализовать большие транспортные скорости, соизмеримые со скоростями грузовых автомобилей. Рельсоколесным ходом оборудуют машины, работающие в ограниченной зоне с идентичными транспортными траекториями, например башенные краны, некоторые виды карьерных экскаваторов непрерывного действия и др. Всякое изменение размеров рабочей зоны этих машин связано с перекладкой путей и обосновано только в случае небольших затрат на эти работы. Рельсоколесное ходовое оборудование как составная часть строительной машины отличается простотой устройства, невысокой стоимостью, достаточной долговечностью и надежностью. Оно представляет собой либо тележку, обычно оборудованную двумя осями с металлическими одно- или двухребордными колесами, либо набор из трех или четырех двухколесных тележек велосипедного типа. Благодаря ограниченной рабочей зоне рельсоколесные машины обычно используют энергию внешней электросети. Основными их недостатками являются: сложность перебазирования на новые строительные площадки, дополнительные затраты на устройство и техническую эксплуатацию рельсовых путей. Устройство и принцип работы рельсоколесного ходового оборудования применительно к башенным кранам рассмотрены в гл. 11. Рельсовый путь, не являющийся принадлежностью машины, обеспечивает последней низкое сопротивление передвижению, постоянную траекторию движения и связанную с этим возможность машины выполнять технологический процесс с высокой точностью. К специальному ходовому оборудованию относятся шагающие, вездеходные и другие устройства. Гусеничные движители (гусеницы) монтируют на раме, называемой также нижней, в отличие от верхней рамы, входящей в остов машины. Шинноколесные движители (ходовые колеса) устанавливают обычно на мостах. Нижние рамы (оси) соединяют с верхними рамами машины с помощью подвесок, которые бывают жесткими, полужесткими и мягкими. Соединение по жесткой схеме осуществляется на болтах и на пальцах, по мягкой схеме — с помощью пружин и рессор, в случае полужесткой схемы (рис. 7.1) одну часть нижней рамы соединяют с верхней рамой по жесткой схеме, а вторую — по мягкой. При движении мягкая подвеска способствует снижению динамических нагрузок от неровностей дороги. Для этих же целей в состав мягких подвесок вводят гидравлические, работающие по принципу гидравлического дросселя, или гидропневматические амортизаторы. 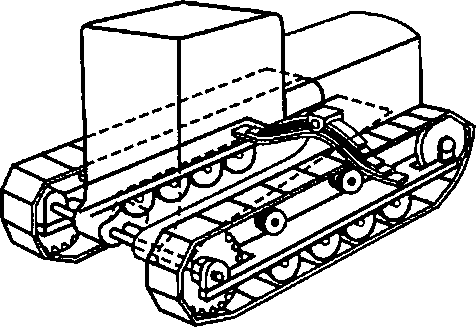 Основными технико-экс- плуатационными показателями ходового оборудования являются: скорость передвижения, проходимость — способность передвигаться в различных эксплуатационных Условиях и маневренность — Способность изменять направ- рис. 7.1. Схема полужесткой подвески ление движения в стесненных гусеничного движителя условиях. Эти свойства присущи гусеничным, шинноколесным и некоторым видам специальных ходовых устройств. Для рельсоколес- ньгх машин эти понятия теряют смысл, поскольку указанные эксплуатационные условия в этом случае будут всегда идентичными — рельсы укладывают на подготовленное основание с соблюдением норм уклонов и определенных радиусов закруглений на поворотах. Проходимость машины характеризуется давлением на грунт — отношением веса машины и внешних сил к площади контакта движителя с опорной поверхностью, дорожным просветом (клиренсом) — расстоянием от наиболее низкой части машины (кроме движителя) до опорной поверхности и сцепными качествами ходового оборудования. Более высокой проходимостью обладает гусеничное ходовое оборудование, имеющее развитую опорную поверхность движителя, обеспечивающую удовлетворяющие условиям эксплуатации удельные давления на грунт и меньшую, чем у шинноколесных машин, осадку. Гусеничные движители не теряют своей транспортной способности даже при погружении в грунт до половины своей высоты. В то же время они уступают шинноколесным по скорости передвижения, которая для большинства гусеничных машин не превышает 10 км/ч. Маневренность характеризуется минимальным радиусом разворота и шириной дорожного коридора. В зависимости от вида привода гусеничные машины могут разворачиваться относительно одной заторможенной гусеницы (при групповом приводе) и относительно собственной оси (при индивидуальном приводе движением гусениц во взаимно противоположных направлениях). Для большинства шинноколесных машин, имеющих одну пару управляемых колес, минимальные радиусы разворота оказываются большими чем у гусеничных машин. По этому показателю гусеничные машины более маневренны по сравнению с шинноколесными. Ширина дорожного коридора есть габаритная ширина следа разворачивающейся машины. Для гусеничных машин она меньше, чем для шинноколесных машин с одной парой управляемых колес. С увеличением базы машины при прочих прежних размерах ширина дорожного коридора также увеличивается. У шинноколесных машин также увеличивается и минимальный радиус разворота. Для работы в стесненных условиях обычно применяют короткобазовые пневмоколесные движители. Ширина дорожного коридора является важной технико- эксплуатационной характеристикой машины, определяющей ее впи- сываемость в ситуационную схему трассы передвижения. 7.2. Гусеничное ходовое оборудование В строительных машинах массой до 1000 т применяют, в основном, двухгусеничные движители, каждая гусеница которых состоит из ходовой рамы 6 (рис. 7.2), замкнутой гусеничной ленты 3, 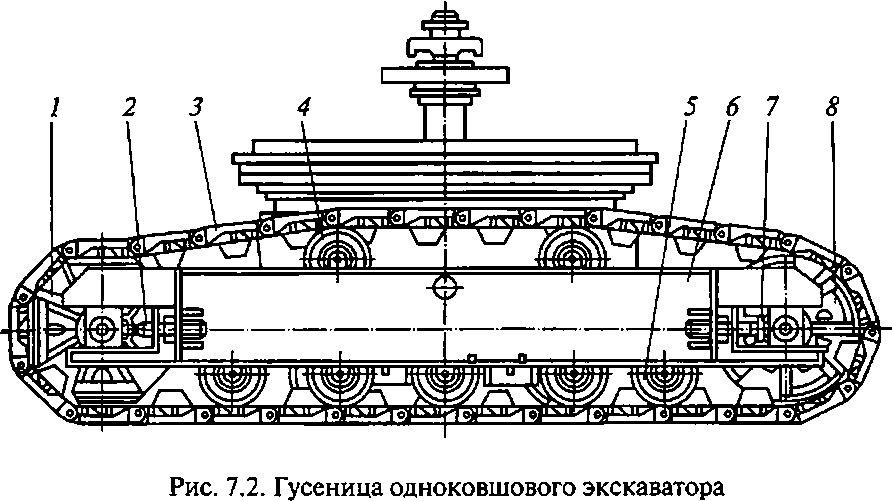 огибающей ведущее 1 и направляющее # колеса, опорных 5 и поддерживающих 4 катков. Различают гусеницы гребневого и цевочного зацеплений. У первых гусеничные ленты состоят обычно из литых звеньев, шарнир- но соединенных между собой пальцами. С внутренней стороны лента имеет гребни, чередующиеся со впадинами, а с наружной — развитую в ширину гладкую поверхность, которой гусеница взаимодействует с опорным основанием. По периферии ведущего колеса имеются кулачки, входящие во впадины внутренней поверхности гусеничной ленты. В случае цевочного зацепления (рис. 7.3) гусеничная лента 1 состоит из соединенных пальцами со втулками 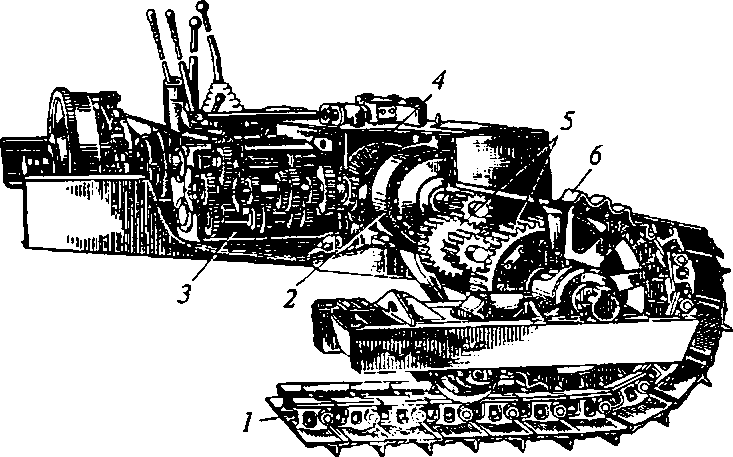 Рис. 7.3. Трансмиссия и гусеница трактора с цевочным зацеплением литых звеньев гусеничной цепи, к которым с наружной стороны болтами с гайками прикреплены башмаки с ребрами (грунтоза- цепами) из стального проката. Ведущее колесо — звездочка 6 входит своими зубьями в промежутки между втулками гусеничной цепи. Такой движитель позволяет двигаться с большими скоростями. Благодаря наличию грунтозацепов гусеницы с цевочным зацеплением обладают лучшим сцеплением с податливым, например, фунтовым основанием, не утрачивают способности передвигаться при поломке отдельных башмаков, но имеют большую массу по сравнению с гусеницами гребневого зацепления. В последнее время цевочное зацепление находит все большее применение в гусеничном ходовом оборудовании строительных машин. Направляющее колесо обычно выполняют как натяжное. Его устанавливают на оси, закрепленной в ползуне, перемещаемом во время натяжения в направляющих ходовой рамы винтом 7(см. рис. 7.2) или гидроцилиндром. Устанавливаемое на некоторых гусеничных машинах, например на канатных одноковшовых экскаваторах, натяжные устройства 2 используют для натяжения приводных цепей ведущих звездочек. Оси опорных катков, обычно двухребордных для предотвращения бокового соскальзывания с них гусеничной ленты, закрепляют на ходовой раме непосредственно или через балансиры 1 с пружинами 2 (рис. 7.4). Гусеницы с непосредственным креплением опорных катков к ходовой раме называют жесткими. Они наиболее просты, обеспечивают более равномерное давление на грунт, но не амортизируют колебаний при езде по неровному жесткому основанию, в связи с чем их транспортные скорости не превышают 5 км/ч. Гусеницы с балансирной подвеской опорных катков и наличием пружин в их подвеске называют мягкими. Они лучше приспосабливаются к неровностям дороги и позволяют двигаться машинам с большими скоростями. Поддерживающие катки, также 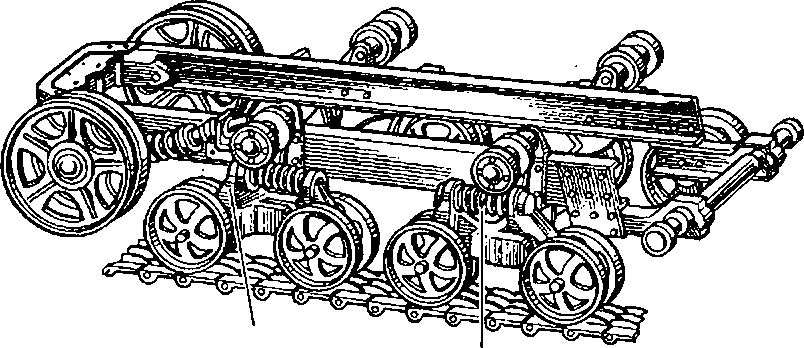 Рис. 7.4. Гусеничный движитель с балансирной подвеской опорных катков 1 2 двухребордные, служат для поддержания верхней ветви гусеничной ленты. Для повышения сцепления гусеничного движителя с грунтом при работе машин в зимних условиях или в грунтах с низкой несущей способностью на гладкие звенья гусеничной ленты устанавливают шипы или шпоры. В последние годы для работы на заболоченных грунтах со слабой несущей способностью применяют резино- металлические гусеницы с развитой опорной поверхностью. Гусеничное ходовое оборудование приводится в движение от ДВС через механическую, гидравлическую или электрическую трансмиссии. В случае механической трансмиссии реализуется схема группового привода, в остальных случаях — индивидуального привода. В качестве примера группового привода на рис. 7.3 представлена трансмиссия гусеничного трактора, состоящая из коробки передач 3, главной конической передачи 4, двух (с каждой стороны от главной передачи) бортовых фрикционов (многодисковых фрикционных муфт) 2, двух бортовых редукторов 5 и двух ведущих колес 6. Проходимость гусеничного движителя в значительной мере зависит от глубины погружения гусениц в грунт А(м), которую приближенно можно считать пропорциональной удельному давлению р(МПа): h= р/с, где с — коэффициент постели (с = 0,1...0,5 МПа/м для свеженасыпан- ного песка и мокрой размягченной глины, с = 20... 100 МПа/м для мягких скальных грунтов, известняков, песчаников, мерзлоты). В паспортных данных гусеничных машин обычно приводят средние удельные давления гусениц на основание, по которым оценивают проходимость машины. В действительности, из-за смещения равнодействующей всех внешних сил от центра опорного контура, это давление не постоянно как по длине гусениц, так и для каждой из двух гусениц гусеничной тележки. 7.3. Шинноколесное (пневмоколесное) и рельсоколесное ходовое оборудование Шинноколесный движитель легче гусеничного, имеет большой ресурс работы (до 30 ...40 тыс. км пробега, что примерно в 20 раз выше ресурса гусеничного движителя), позволяет машине перемещаться на больших скоростях (до 60 км/ч и более) и по сравнению с гусеничным движителем отличается большей долговечностью и ремонтопригодностью, а также более высоким КПД. К его недостаткам относятся: большое удельное давление на основание в связи с малой контактной площадью и меньшая сила тяги по сцеплению движителя с грунтом. Для повышения сцепления при работе в трудно проходимой местности на колеса одевают цепи. Шинноколесный движитель состоит из колес с пневматическими шинами, надеваемых на мосты. Колеса приводятся ходовой трансмиссией. Пневматические шины могут быть камерными (рис. 7.5, а) и бескамерными (рис. 7.5,б). Камерная шина состоит из покрышки, камеры, ободной ленты и вентиля для накачивания воздуха в камеру. Бескамерные шины представляют собой покрышки, герметически прилегающие к ободьям. Покрышки изготавливают из резины, армированной тканевым и металлическим кордом. Утолщенную периферийную часть покрышки называют протектором с рифлениями определенной формы, называемыми рисунком протектора. Различают шины обычного профиля для землеройных машин / (рис. 7.5, в), для работы в каменных карьерах II, противобуксу- ющие III и универсальные IV. Для повышения проходимости при работе на слабых и рыхлых грунтах, а также по снегу используют широкопрофильные и арочные (рис. 7.5, г) шины с повышенной опорной поверхностью и развитыми грунтозацепами. При работе арочных шин на твердых грунтах и дорогах с твердым покрытием сопротивление передвижению машины увеличивается, а срок службы шин резко уменьшается. Для повышения проходимости машин, снижения сопротивления передвижению и износа шин в современных строительных машинах давление воздуха в шинах регулируют на ходу из кабины  машиниста (снижают при движении по рыхлому или влажному грунту и повышают при движении по дорогам с твердым покрытием). С уменьшением давления воздуха в шинах увеличивается площадь опорной поверхности шин с грунтом, вследствие чего снижается удельное давление на грунт, повышается проходимость и улучшаются тяговые качества машины. С увеличением давления воздуха при движении по твердому основанию уменьшаются сопротивления движению и увеличивается долговечность шин. В шинноколесном движителе различают приводные и управляемые колеса. Первые приводятся от ходовой трансмиссии, а вторыми управляют при изменении направления движения машины. Управляемые колеса могут быть одновременно и приводными. Шинноколесное ходовое оборудование может быть двухоснымI с одной или двумя ведущими осями, трехосным с двумя или тремя ведущими осями, четырехосным и т.д. Эту структуру обозначают колесной формулой вида Ах В. Первой цифрой обозначают общее число колес (колесо из двух шин считается за одно колесо), а второй — число приводимых колес. Наиболее распространены машины с колесными формулами 4х2и4х4. С увеличением числа приводных колес повышается проходимость и тяговые качества машины, но усложняется механизм передвижения. Приводы шинноколесного ходового оборудования строительных машин могут иметь механическую, гидравлическую и реже — электрическую и комбинированную трансмиссии. В случае механических и гидромеханических трансмиссий ведущие колеса приводятся в движение попарно через дифференциальные механизмы, называемые также сокращенно дифференциалами и обеспечивающие высокие скорости движения без проскальзывания. На рис. 7.6, а представлена схема устройства ведущего моста с дифференциалом, а на рис. 7.6, бив — схема работы последнего. Дифференциал соединяет полуоси ведущих колес с главной конической передачей, давая возможность каждому колесу вращаться с различной скоростью. Это необходимо при повороте машины, когда колеса движутся по дугам окружностей различных радиусов, проходя разные пути, а также, например, при движении одного колеса по ровной, а второго — по неровной дороге. Дифференциал состоит из главного конического колеса 1 (см. рис. 7.6, а), жестко соединенного с коробкой 3 и приводимого во вращение от силовой установки машины через шестерню 2, двух ведомых конических зубчатых колес 6 и 9, жестко посаженных на ведущие полуоси 4 и 10 ходовых колес 5 и 11, и двух сателлитов 7, свободно посаженных на ось 8 и находящихся в постоянном за- цепдении с колесами 6 и 9. Крутящий момент от зубчатого колеса 1 передается на коробку 3, вместе с которой вращается ось 8 и сателлиты 7, передающие вращение зубчатому колесу 6 с полуосью 4 и колесу 9 с полуосью 10. При движении по прямой ровной дороге (см. рис. 7.6, б) все составные части дифференциала, а вместе с ними и полуоси с ходовыми колесами вращаются как одно целое. При повороте вправо (рис. 7.6, в) ходовые колеса, их полуоси и зубчатые колеса 6 и 9 будут вращаться с разными скоростями, а сателлиты 7 будут обкатываться относительно зубчатого колеса 6, одновременно вращаясь относительно оси 8, и, вследствие зацепления с колесом 9, будут увеличивать его скорость. При повороте влево отличие в работе дифференциала будет заключаться в обкатывании сателлитов относительно зубчатого колеса 9.  Рис. 7.6. Схема устройства ведущего моста с дифференциалом (а) и работа дифференциала (б и в) в Описанный дифференциал обладает двумя свойствами: он распределяет крутящий момент между приводимыми им полуосями поровну, а сумма скоростей двух полуосей всегда пропорциональна скорости ведущего вала. Это означает, что с уменьшением скорости вращения одной полуоси на столько же увеличится скорость второй полуоси. В частности, при полной остановке одной полуоси, например, при буксовании, когда одно ходовое колесо находится на сухой, а второе — на увлажненной поверхности, скорость второй полуоси удвоится. Для устранения возможности буксования при движении в сложных дорожных условиях дифференциал блокируют специальными устройствами. Привод без дифференциала более прост, обеспечивает более высокие тяговые усилия, но при поворотах машины и при движении по неровной дороге увеличиваются расход энергии и износ шин. В последние годы в строительных машинах получает развитие индивидуальный привод каждого колеса от собственного гидро- или электродвигателя, называемый приводом с мотор-колесами. Мотор-колесо представляет собой самостоятельный блок, обычно состоящий из двигателя, муфты, планетарного редуктора, тормоза и колеса. Применение гидропривода с высоким давлением позволяет при низкомоментных гидродвигателях создавать компактные, встроенные в обод колеса, конструкции, успешно конкурирующие с другими типами приводов. Применение мотор-колес упрощает компоновку машины, повышает ее маневренность и проходимость за счет того, что каждое колесо может служить одновременно приводным и управляемым (поворотным). 7.4. Тяговые расчеты В тяговых расчетах решается задача определения сопротивлений передвижению машины и ее тяговых возможностей. |