|
|
Волков Строительные машины. Среднее профессиональное образование
Биметаллический чувствительный элемент (рис. 6.12, в, г) состоит из двух сваренных вместе металлических пластин с различными коэффициентами линейного расширения. Температуру измеряют по отклонению конца биметаллического стержня Дх или по углу отклонения от исходного положения конца спирали Ад.
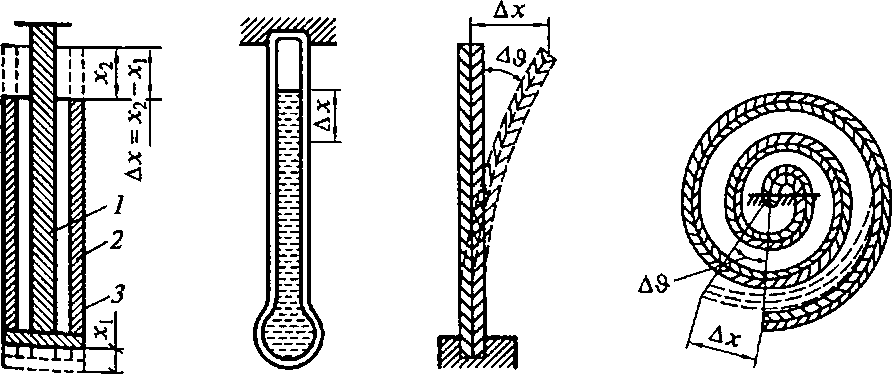
Рис. 6.12. Датчики расширения:
в
г
б
а
а — дилатометрический элемент; 6 — жидкостный элемент расширения; в, г — биметаллический чувствительный элемент
Чувствительные элементы термометров сопротивления (рис. 6.13) представляют собой тонкую медную, никелевую или платиновую проволоку, навитую на каркас (терморезистор) (см. рис. 6.13,а), или полупроводниковый термисторный элемент (см. рис. 6.13,б), состоящий из смеси окислов никеля, марганца, кобальта, магния, титана, спрессованных и спеченных при высокой температуре в виде стержней, шайб, дисков и бусинок. Электрические элементы сопротивления и термисторы предназначены для измерения температуры через сопротивление проволоки или полупроводника,
изменяемое при нагреве. Чувствительность термисторов на порядок выше чувствительности проводниковых терморезисторов.
В датчиках расхода и уровня элемент, взаимодействующий с измеряемой средой, называют воспринимающим элементом. Различают воспринимающие элементы скоростные, объемные, переменного и постоянного перепадов.
Скоростной воспринимающий элемент (рис. 6.14, а) представляет собой крыльчатку, устанавливаемую в потоке жидкости или газа, расход которых определяют по скорости вращения вала крыльчатки. В САР последний связан с датчиком системы регулятора.
В качестве объемного датчика расхода может применяться любой гидромотор, к валу которого подключают измеритель. В датчике с элементом переменного перепада (рис. 6.14, б) расход измеряют по разности давлений, регистрируемых манометром 2 до и после дросселя 1.
В датчике постоянного перепада (ротаметре) (рис. 6.14, в) воспринимающим элементом является поплавок 5 с линейкой 3, перемещающийся в коническом корпусе 4. Изменение расхода жидкости или газа вызывает изменение положения поплавка и, следовательно, проходного сечения между ним и корпусом. Равновесие поплавка наступает при постоянном расходе жидкости или газа.
Рис. 6.13. Чувствительные элементы тензометров сопротивления:
а — терморезистор; б — термистор- ный элемент
Для измерения уровня жидкости или сыпучих материалов применяют различные приборы, простейшими из которых являются
Рис. 6.14. Воспринимающие элементы расхода жидкостей и газов: а — скоростной; б — переменного перепада; в — постоянного перепадапоплавковые и буйковые, чувствительным элементом которых является плавающий (рис. 6.15) или полностью погруженный в измеряемую жидкость поплавок (буек). Для той же цели применяют емкостные приборы, работающие по принципу изменения электрической емкости датчика при изменении уровня измеряемой среды. Радиоактивные приборы, основаны на изменении протекающего через объект потока излучения при изменении уровня. В мембранных приборах давление столба измеряемой жидкости уравновешивается упругой деформацией мембраны или пружины и др.
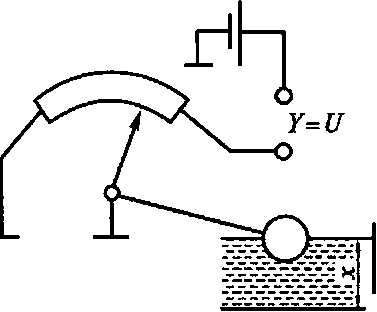
Рис. 6.15. Поплавковый датчик уровня
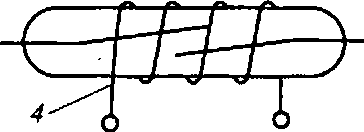
Для измерения и регулирования скорости вращения валов в машинах и механизмах применяют датчики угловой скорости ( тахометры). Наиболее распространены механические и электрические тахометры. В механических тахометрах центробежного типа (рис. 6.16, а) за счет центробежных сил, возникающих при вращении чашки /, шарики 2 отбрасываются на периферию, воздействуя на тарелку 3, поджимаемую к чашке пружиной 4. По осевому перемещению тарелки судят о скорости вращения измеряемого вала. 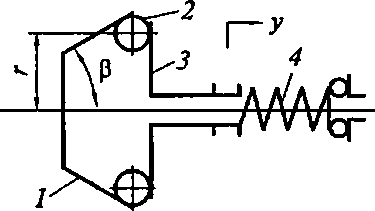 х=ш 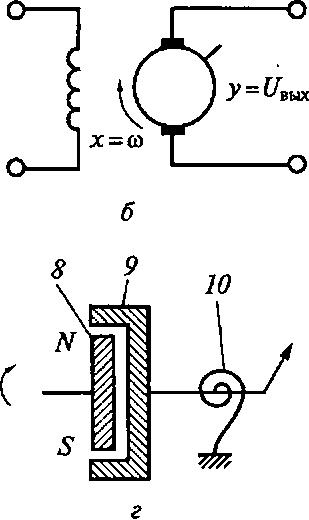 возб Х=СО U, 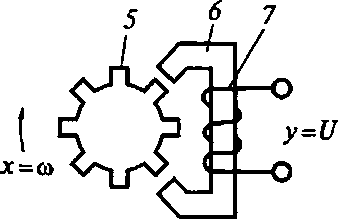 Рис. 6.16. Датчики угловой скорости: о — центробежного типа; б — с независимым возбуждением; в — индукционные; г — магнитоиндукиионныеЭлектрические тахометры (тахогенераторы) представляют собой малогабаритные генераторы постоянного или переменного тока. На рис. 6.16, б представлена схема тахогенератора постоянного тока с независимым возбуждением. Угловую скорость со измеряют через напряжение генератора U aba. Статическая характеристика промышленных тахогенераторов линейна, погрешность измерений — 2...3 %. Для измерения угловой скорости также широко применяют индукционные датчики (импульсные генераторы), принцип действия которых основан на явлении электромагнитной индукции, заключающейся в наведении ЭДС в электрическом контуре за счет изменения магнитного потока. Датчик (рис. 6.16, в) состоит из вращающегося зубчатого ротора 5 и неподвижного постоянного магнита 6 с обмоткой 7. При вращении ротора к полюсам магнита попеременно подходят то два выступа, то две впадины. Это приводит к изменению магнитного потока в сердечнике и появлению в обмотке электрического тока, амплитуда и частота которого пропорциональны частоте вращения измеряемого вала. В магнитоиндукционных тахометрах (спидометрах) (рис. 6.16, г) во вращающемся с угловой скоростью со магните 8 наводится ЭДС, которая вызывает появление в нем тока. В результате взаимодействия электрического тока с магнитным полем магнита возникает крутящий момент, стремящийся повернуть цилиндр 9 в направлении вращения магнита. Этому препятствует пружина 10, вследствие чего цилиндр поворачивается на угол, пропорциональный угловой скорости (0. Для измерения скорости ветра при работе строительных кранов используют анемометры, датчиком которых является трехлопастная вертушка, вращающаяся со скоростью, пропорциональной скорости ветрового потока. Вертушка механически соединена с тахогенератором, сигнал от которого поступает на измерительный пульт. На передней панели пульта установлены: указатель скорости ветра, кнопка разблокирования выходного реле и три сигнальных лампы — белая, желтая и красная. Белая лампа загорается при включении анемометра в сеть, желтая — при увеличении скорости ветра до предельно допустимого значения, красная — при длительных порывах ветра предельно допустимой скорости. При этом выходное реле самоблокируется. После уменьшения скорости ветра кнопкой разблокирования реле схему измерительного пульта возвращают в исходное (рабочее) состояние.
Для измерения линейных ускорений применяют десселерометры (рис. 6.17), у которых отклонение инерционного звена от равновесного состояния пропорционально изменению скорости контролируемого объекта. Для измерения угловых ускорений валов применяют тахогенераторные или индукционные датчики со вторичным прибором, реагирующие на изменение частоты вращения.
6.3. Усилительные и переключающие устройства
Обычно мощность выходного сигнала воспринимающего или преобразующего элемента недостаточна для управления исполнительным элементом. Для ее увеличения применяют усилительные элементы, использующие энергию вспомогательного источника. В системах автоматики широко применяют усилители-преобразователи, которые, кроме усиления, преобразуют входной сигнал в другой вид выходного сигнала, например, сигнал постоянного тока — в переменный. Основными показателями усилителя являются коэффициенты усиления по току /, напряжениюU или мощности Р:
К, /Л*; - ивык / иш\ кР
^вых /Лх-
Подстрочными индексами здесь обозначены выходные и входные величины. В случае последовательного соединения п усилителей для значительного увеличения входного сигнала общий коэффициент усиления определится как
^общ = Кг- КП-
В зависимости от вида усиливаемого сигнала различают усилители электрические, магнитные, пневматические и гидравлические. По принципу действия усилители подразделяют на усилители аналогового и дискретного (релейного) действия.
Представителем усилителей дискретного действия является электромагнитное реле, в котором входной электрический ток, достигнув некоторого значения, преобразуется в перемещение якоря, механически замыкающего контакты более мощной электрической Цепи управления. Различают нейтральное реле (постоянного тока), реле переменного тока и поляризованное реле постоянного и переменного тока.
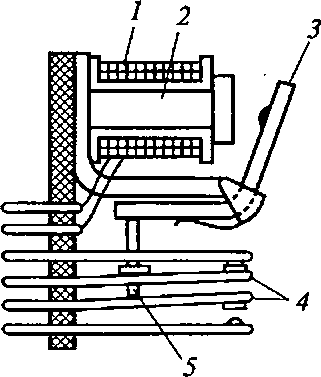
Рис. 6.18. Нейтральное реле постоянного тока
В нейтральном реле постоянного тока (рис. 6.18) магнитопровод состоит из ярма с сердечником 2 и якоря 3, изго
товленных из мягкой стали. Управление работой реле осуществляется с помощью обмотки 1 на сердечнике 2. Якорь связан с подвижными контактами 4 с помощью толкателя 5. При пропускании электрического тока по обмотке реле якорь притягивается к сердечнику, размыкая верхнюю пару контактов и замыкая нижнюю. Основными характеристиками реле являются: ток срабатывания, при котором начинается притягивание якоря к сердечнику; ток отпускания, соответствующий началу возвратного хода якоря; время срабатывания и время отпускания. По временным параметрам различают реле быстродействующие (время срабатывания 10 мс), нормальные (30...50 мс) и замедленные или реле времени (от десятых долей секунды до минуты и более).
В последние годы широкое распространение в технике получили герметизированные магнитоуправляемые контакты, называемые герконами. Простейший геркон (рис. 6.19, а) представляет собой стеклянную запаянную ампулу 1, заполненную инертным газом (азотом, аргоном, водородом или азотно-водородной смесью). Внутри ампулы размещены две тонкие пермалоевые пластины 2 с токоотводами. Концы пермалоевых пластин, контактирующих при замыкании, покрыты защитным слоем золота, родия или палладия. Работой геркона управляют постоянные магниты 3 или электромагниты 4 (рис. 6.19, б). При воздействии на геркон магнитного поля достаточной напряженности магнитные силовые линии замыкают контакты. При ослаблении магнитного поля контакты размыкаются от действия сил упругости. Один или несколько герконов, помещенных в управляемое магнитное поле, образуют безъякорное реле. Герконы просты по устройству и в управлении их работой, надежны и не требуют регулировки. Они могут работать в широком диапазоне температур -100...200"С, обладают достаточной для применения в автоматических устройствах строительных машин вибро- и удароустойчивостью. Их недостатком является небольшая сила управляемых токов. Герконы надежно работают при малых значениях тока в десятки миллиампер. Максимально допустимая сила тока для геркона с длиной стеклянного баллона 50 мм
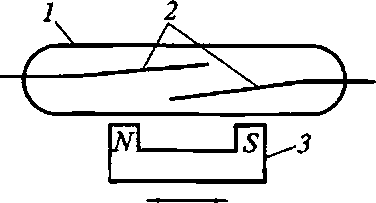
Рис. 6.19. Геркон: а — с постоянными магнитами; б — с электромагнитами
яе превышает 1 А. Имеются герконы на рабочие токи до 5 А с ампулой, заполненной юдородом.
Принцип действия элек- Гронных (ламповых или полупроводниковых) усилителей эснован на явлении электронной эмиссии — испускании электронов твердыми гелами при внешнем энергетическом воздействии. Основными частями ламповых усилителей являются триоды, тетроды и пентоды.
Триод, или трехэлектрод- чаялампа, (рис. 6.20, а) пред- л'авляет собой вакуумную стеклянную или металлическую колбу с тремя электродами: анодом {А), катодом (А') и сеткой (С). Если лампу включить в электрическую сеть, приложив к катоду отрицательный, а к аноду и сетке положительный потенциал, то электроды от катода будут перемещаться на анод, замыкая электрическую цепь (лампа открыта). Если же потенциал на сетке поменять на отрицательный, то поток электронов прекратится, и анод окажется обесточенным (лампа заперта). Тетроды (рис. 6.20, б) и пентоды (рис. 6.20, в) (соответственно четырех- и пятиэлектродные лампы) имеют более сложное управление из-за наличия в них соответственно двух и трех сеток. Простейший однокаскадный усилитель показан на рис. 6.20, г.
В САУ нашли широкое применение полупроводниковые усилители на базе триод-транзисторов, которые позволяют усиливать мощность и силу тока подаваемых сигналов, а также тиристорные преобразователи-усилители. Применение последних обеспечивает плавность пусковых режимов, повышение КПД, снижение массы и габаритных размеров аппаратуры.
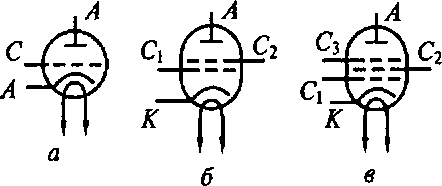
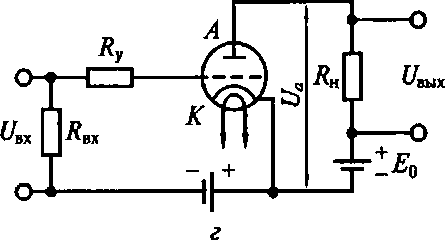
Рис. 6.20. Электронные лампы (а—в) и однокаскадный усилитель (г)
Бесконтактные магнитные усилители (МУ) — электромагнитные устройства, обладающие высокой чувствительностью и долговечностью. В них используется зависимость магнитной проницаемости ферромагнитного материала от напряженности магнитного поля. В системах автоматизированного электропривода постоянного тока, в частности, для регулирования частоты вращения широкое распространение получили электромашинные усилители (ЭМУ) — генераторы постоянного тока с регулируемым возбуждением. Они имеют значительную выходную мощность, высокие коэффициенты усиления по мощности и напряжению, быстро- действенны.
6.4. Счетно-решающие устройства
В системах автоматики используют различные элементы счетно-решающих устройств, такие как: счетчики импульсов, логические элементы, микропроцессоры.
Счетчики импульсов — это устройства для отсчета и запоминания числа поступивших электрических импульсов за некоторый промежуток времени. Их применяют для оценки частоты вращения (частотомеры) в качестве датчиков интервалов времени, декодирующих элементов, а также составных частей синхронизирующих и управляющих устройств.
Логические устройства, в частности реле времени электромеханического, пневматического и электронного типов применяют для решения сложных задач оптимального поиска.
Для обработки цифровой информации в системах автоматики используют программно-управляемые устройства на основе больших микроэлектронных интегральных схем (БИС), называемые микропроцессорами. Каждая БИС представляет собой кристалл размером в несколько квадратных миллиметров, в котором сосредоточены десятки тысяч полупроводниковых элементов. В каждой БИС микроэлементы соединены между собой внутренними связями. Внешние контакты служат для ввода и вывода информации, а также для внешнего управления.
Управление работой строительных машин с использованием микропроцессоров следует рассматривать как одно из наиболее перспективных направлений совершенствования этих машин на ближайшее будущее. Микропроцессорная система моделирует реальный процесс функционирования машины и на основе прогноза ее состояния формирует набор машинных команд.
Контрольные вопросы
Что такое автоматизация строительных машин? Изложите существо автоматического управления строительными машинами. Какими факторами обусловлено применение для этого систем автоматики? Что такое автоматический контроль? автоматическое регулирование?
Приведите классификацию автоматических систем по алгоритму управления и назначения. Охарактеризуйте эти системы. Приведите примеры их использования.
Для чего применяют датчики? Какова структура датчика, что такое чувствительный элемент? Что такое входная и выходная величины? Приведите классификацию датчиков по назначению. Что такое чувствительность датчика? Чем отличаются линейные датчики от нелинейных? Что такое инерционность датчика, порог чувствительности, предел преобразования, динамический диапазон?
Для чего предназначены, как устроены и как работают датчики перемещения (положения), углового положения, силового воздействия,
контроля и регулирования температуры, расхода и уровня, угловой скорости, линейных ускорений?
Для чего применяют усилители? Что такое коэффициент усиления? приведите классификацию усилителей по виду усиливаемого сигнала и ЛО принципу действия.
Перечислите типы электромагнитных реле. Как устроено и как ра- ает нейтральное реле постоянного тока? Как их классифицируют по мени срабатывания?
Что такое геркон, для чего он предназначен, как устроен, каков рринцип его работы и каковы основные параметры?
Для чего предназначены, как устроены и как работают электрон- !цые ламповые усилители (на примере трехэлектродной лампы)?
Для чего применяют счетчики импульсов?
Для чего в автоматических системах применяют микропроцессоры? На какой базе они построены?
Глава 7. ХОДОВОЕ ОБОРУДОВАНИЕ СТРОИТЕЛЬНЫХ МАШИН
7.1. Виды ходового оборудования и их характеристики
Ходовое оборудование предназначено для передачи нагрузок на опорное основание и передвижения машин. Ходовое оборудование может быть активным и пассивным. Активным ходом оборудуют самоходные машины, а пассивным — машины, перемещаемые на буксире за тягачом, в качестве которого может быть использована любая самоходная машина.
Ходовое оборудование включает взаимодействующий с опорным основанием движитель, подвеску и опорную раму или оси. В самоходных машинах, кроме того, имеется механизм передвижения. По типу движителя ходовое оборудование подразделяют на гусеничное, шинноколесное, рельсоколесное и специальное.
|
|
|
 Скачать 5.2 Mb.
Скачать 5.2 Mb.