Структурный анализ рычажного механизма. Структурный анализ рычажных механизмов по Ассору. Структурный анализ рычажных механизмов по АссоруАртоболевскому
 Скачать 124.18 Kb. Скачать 124.18 Kb.
|

|
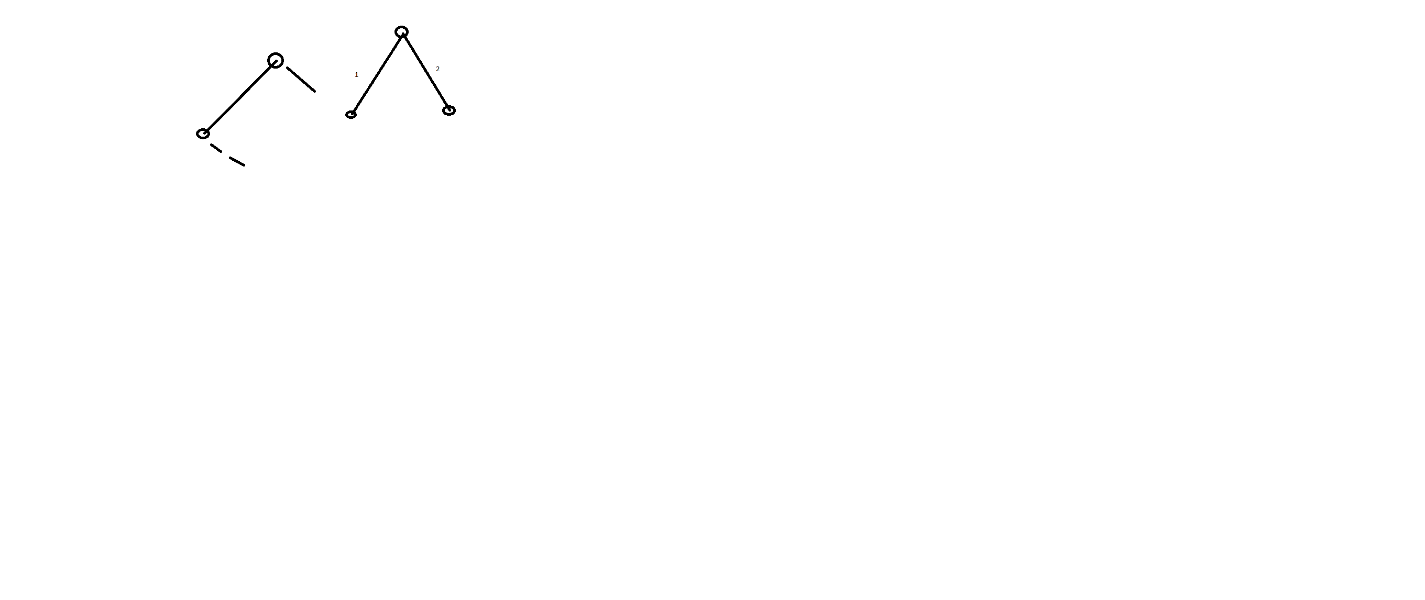
Структурный анализ рычажных механизмов по Ассору-Артоболевскому Структурный анализ основан на том, что самый простой рычажный механизм состоит из стойки и подвижного звена. Такие механизмы встречаются довольно часто степень подвижности такого механизма всегда ровна единицы. Простейший механизм состоящий из начального подвижного звена и стойки назван начальным механизмом, более сложные рычажные механизмы могут быть получены путём присоединения к одному или нескольким звеньям кинематических пар, эти группы звеньев с 0 степенью подвижности называются группами ассура. Наиболее распространены простейшие двухповодковые группы.  Если такие группы присоединить внешними парами к стойке, то они превратятся в фермы.  Фермы, если же группы присоединить свободными парами к начальному звену и стойке получаются 4-звенные механизмы с одной степени свободы. 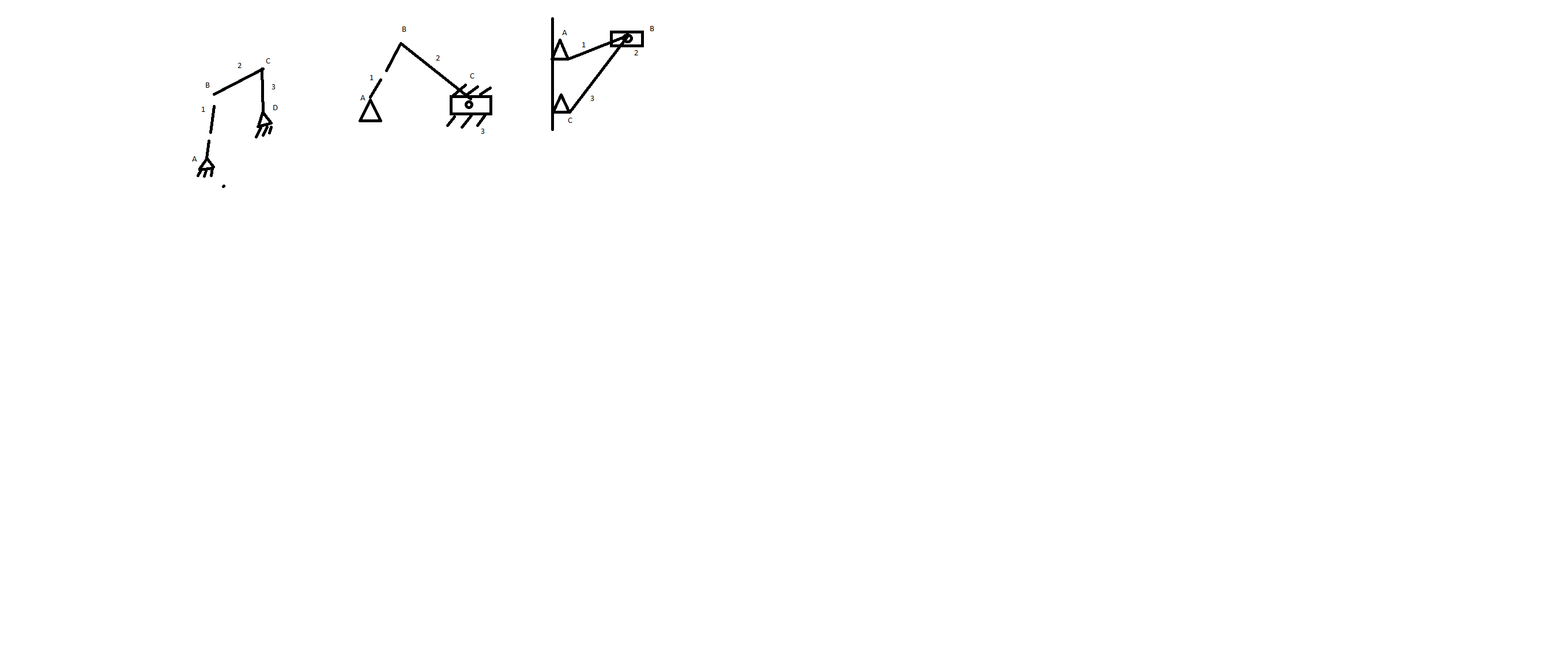 Согласно классификации, все группы Ассора разделены на классы 2-3-4-5 и т.д. Класс определяется по внешнему признаку группы. В группах 2 класса каждое звено входит только в 2 кинематические пары. В группах 3-го класса есть звено входящее в 3 пары и т.д. Другие внешние признаки групп являются второстепенными и на класс группы не влияют. В зависимости от сложности в механизме может быть не одна, а несколько групп Ассора различных классов. Класс всего механизма определяется наивысшим классом входящим в него группой Ассора. Классификация структурных группа Ассора
Кинематический анализ сочетает в определении движении звеньев с геометрической точки зрения без учёта сил вызывающих это движение при этом должны быть заданы схемы механизма, размеры его звеньев и законы движения начальных звеньев если например начальным звеном является кривошип, то его законным движением обычно является равномерное вращение вокруг неподвижной оси в этом случае задаётся либо частота вращения кривошипа N либо угловая скорость омега. В результате кинемат анализа должны быть последовательно определены: 1.Положение звеьев и траектории движения 2. Линейные скорости отдеьлных точек и угловые скорости звеньев. 3.Линейные ускорения отдельных точек и у Все названные кинематические параметры изменяются переодически т.к. движение большинства механизмов наблюдается периодически, кинематич анализ достаточно произвести для одного периода, кинематический анализ ведётся в следующем порядке: Сначала исследуется движение начального звена, затем выполняется кинематический анализ отдельных групп Ассора в порядке их присоединения при образовании механизмов, кинематическое исследование можно производить как аналитическими методами так и графо аналитически, графо-аналитический метод отличается наглядностью относительной простотой, но не дают точных результатов. Аналитические методы предпочтительней в тех случаях когда нужно привести систематическая углубленная система какого либо механизма с высокой точностью результата кроме того аналитические методы позволяют выявить взаимосвязь кинематических параметров механизмов с размерами звеньев, основным методом графа-аналитического метода является метод построения планов положений скоростей и ускорений механизма. Планом механизма называется графическая изображение взаимного расположения звеньев в соответствующее выбранному моменту времени, построение плана механизма следует начинать с изображения по заданным координатам, неподвижных элементах звеньев затем чертиться начальное звено в одном из положений потом определяются положение звеньев групп Ассора, в группах Ассора 2 класса положение звеньев находится элементарным методом засечек с помощью циркуля и линейки. Для механизмов циклического действия у которых один оборот начального звена совпадает с периодом кинематического цикла обычно строят 12 планов механизма на одном чертеже. Для получения траектории движения точек механизма нужно соединить положение этих точек на всех планах механизма плавной кривой. Для определения величины скорости и направления и ускорения отдельных точек строят планы скорости и ускорения. Планом скоростей(ускорений) звена называется графическое построение представляющая собой пучок, лучи которого изображают абсолютные скорости(ускорения) точек звеньев механизма, а отрезки соединяющие концы лучей относительные скорости(ускорения) соответствующих точек при заданном положении звена. Планом скоростей(ускорений) называется совокупность планов скоростей всех звеньев механизма с одним общим полисом 3 плакат зубчатый 4 плакат кулачковый СДАТЬ ДО 21 ДЕКАБРЯ. Планы скоростей и ускорений плоских механизмов При аналитическом анализе рычажных механизмов используются два общих метода: 1.Метод преобразования координат 2.Метод замкнутого векторного контура Сущность второго метода состоит в том, что звенья механизма изображают в виде вектора, которые образуют на схеме механизма 1 или несколько замкнутых векторных контура. Затем составляют уравнение замкнутости каждого контура. Проецируя векторы замкнутых контуров на оси выбранной системой координат получают аналитические зависимости положения звениев от обобщенной координаты механизмов. Дифференцируя уравнения проекции по обобщенной координате получают формулы для определения аналогов скоростей и ускорений Направление векторов выбираются так что бы они указывали последовательность построения схемы механизмов. Сначала намечаются неподвижные точки механизма, направления вектора на неподвижном звене выбираются произвольно затем в виде вектора изображается начальное звено. Начало этого вектора совмещается с неподвижной точкой векторы изображающие звенья в группах Ассура направляются к внутренней кинематической паре групп обходя каждый векторный контур схемы в произвольном выбранном направлении составляют уравнение замкнутости, в которых векторы направленные против направления обхода имею знак «минус» Для решения уравлнения замкнутости выбирается прямоугольная система координат, на оси которой должны проецироваться векторы замкнутых контуров. Эту систему координат связывают со стойкой за начало координат принимается центр шарнира соединяющего начальное звено со стойкой. Если в механизме есть неподвижная, направляющая для ползуна, то одну из осей координат проводят параллельно этой направляющей, вторая ось проводится перпендикулярно первой. Углы между векторами имеют индексы. Сначала записываются индекс звена, которому относится данный угол, а затем индекс от которого отсчитывается угол. Углы, угловые скорости и ускорения считаются положительными, если они направлены против часовой стрелки. Силовой анализ механизмов При конструировании необходимо решать задачи обеспечения необходимой прочности, жесткости и долговечности, для этого необходимо знать силовую нагрузку звеньев и кинематических пар, кроме того своим действием приложенные к механизму силы сообщают ему тот или иной закон движения, силы и пары сил, приложенные к механизму машинного агрегата разделены на 5 групп. Силы взаимодействия между звеньями механизмов эти силы можно разложить на 2 составляющие нормальное и касательное, нормальные силы работы не совершаю, а касательные совершают отрицательную работу Силы и моменты первых 3 групп называются активными или внешние т.к. они приложени из вне. К внешнем относят так же все силы и моменты 4 группы но не все из них являются активными. Силы 5 группы называются внутренними они представляют собой реакции на действия активных сил и всегда взаимобратимы на закон движения наибольшее влияние оказывают движущие силы и моменты, а также силы сопротивления и моменты сопротивления в большинстве случаев эти силы и моменты не являются постоянными, а изменяют свою величину при изменении положений звеньев механизма и их скорости. Задачи силового исследования механизмов Основывается на решении прямой задачи динамики – по заданному определить движущие силы поэтому закон движения начальных звеньев при силовом анализе считается заданным. При силовом исследовании механизмов силы трения кинематической пары не учитывается т.к. они обычно не велики по сравнению с другими силами следовательно, подлежат определению только реакции кинематической пары иногда внешние силы приложенная к начальным звеньям считаются неизвестными тогда силовой анализ входит задача определения таких величин этих сил. При работе механизмов отдельное звено в общем случае совершают с ускорением. Поэтому при силовом анализе используется принцип Доломбера согласно которому звено механизмов может рассматриваться как находящийся в равновесии если ко всем внешним силам если еще добавить силы инерции. Этот приём упрощает решение задач силового анализа, т.к. позволяет использовать называемое уравнениями кинетостатики, силовое исследование механизмов с применением сил инерции называется Кинетностатическим исследованием механизма |