Гос экзамен по специальности Приборостроение. Ответы на вопросы ГОС экзамена. Тактильные датчики применяют для обнаружения объекта, установления момента
 Скачать 1.42 Mb. Скачать 1.42 Mb.
|

|
Тактильные системы очувствления. Назначение тактильных датчиков и их классификация. Тактильные датчики применяют для обнаружения объекта, установления момента соприкосновения с ним, определения размеров объекта, контроля силовых и моментных нагрузок и давления на объект, установления готовности основного технологического оборудования к обслуживанию роботом, а также для обеспечения безопасной работы. Тактильными называют такие системы, которые позволяют роботу зарегистрировать факт касания с объектом, определить положение точек касания и измерить контактные силы в каждой из них. В зависимости от физических принципов работы различают деформационные, пьезорезистивные, пьезоэлектрические, на основе проводящей резины, емкостные, тензорезистивные Т-сенсоры. Наиболее распространенными являются следующие: резистивный, тензорезистивный, емкостной, пьезоэлектрический. Базовый элемент тактильного датчика – сенсор с тактильной чувствительностью, или таксел (тактильный пиксел). Он преобразует механическое давление в электрический сигнал. На базе такселов создается тактильная поверхность – Т-сенсор. Соединенный со схемами обработки сигнала, Т-сенсор образует тактильный датчик. Т-сенсоры характеризуются чувствительностью, разрешением, быстродействием, циклируемостью. Высокочувствительные Т-сенсоры с высоким разрешением относят к сенсорам осязания. Обычно они строятся на основе многоэлементных матриц на гибкой органической подложке. Анализ показывает, что Т-сенсоры должны иметь следующие характеристики: Количество такселов в Т-сенсоре. .................. 25–105 Пространственное разрешение................ 0,1–10 мм Диапазон чувствительности............200 Па – 20 МПа Полоса пропускания............................... 1000 Гц Нелинейность......................................... до 7% Гистерезис.............................................. 3–10% В большинстве случаев контактирующая поверхность датчика должна обладать способностью принимать различную форму (например, форму руки робота), это свойство есть у гибких Т-сенсоров, которые выдерживают многократные изгибы. Конструкции матричных Т-сенсоров Конструктивно матричные Т-сенсоры можно разделить на следующие типы: • матрица из линейных такселов, • матрица из такселов со схемами выборки и адресации. В Т-сенсорах основными компонентами являются элементы, воспринимающие внешнее воздействие, и элементы управления ими. Требование гибкости Т-сенсоров предполагает использование гибкой подложки, на которой они располагаются. Естественным является встраивание этих элементов в саму подложку. Поскольку в качестве гибких подложек повсеместно применяют полимерные пленки, целесообразно использовать и полимерные активные элементы. Тактильные датчики очувствления Тактильные (осязательные) датчики являются самыми «молодыми». Их появление обусловлено развитием робототехники и автоматических поточных линий. Существующая классификация рассматривает три типа тактильных датчиков: касания, усилия и проскальзывания. Первые два типа тактильных датчиков измеряют один и тот же параметр – действующую силу. Отличаются они только видом выходного сигнала. Датчики усилия имеют аналоговый выходной сигнал, а датчики касания – выход релейного типа с регулируемыми уставками. Реализуются тактильные датчики с использованием различных физических явлений, но принципиальным отличием от других датчиков является их небольшая толщина. Это достигается за счет использования специальных материалов. Они, как правило, обладают гибкостью, эластичностью и прочностью при хорошей электропроводности. На рис. приведен пример реализации тактильного датчика, реагирующего на силовое воздействие. 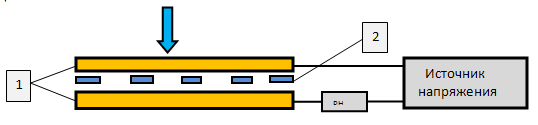 Рис. . Пример простого тактильного датчика силы Датчик представляет собой две тонких металлических пластины 1 между которыми расположена ячеистая прокладка 2 из изоляционного материала. Один полюс источника напряжения подключен к верхней пластине. Второй – через нагрузочный резистор Rн к нижней пластине. Когда к верхней пластине в районе ячейки прикладывается внешняя сила, пластина, прогибаясь, замыкается с нижней. Через резистор протекает ток, а падение напряжения на нем служит выходным информационным сигналом. Тактильный датчик с использованием пьезоэлектрического эффекта приведен на рис. . 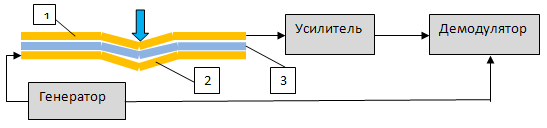 Рис. . Пьезоэлектрический тактильный датчик силы Он представляет собой два параллельных слоя 1 и 2 пьезоэлектрических пленок, разграниченных акустически проницаемым слоем 3. К нижней пьезопленке подключен генератор и при его работе она колеблется с генерируемой частотой. При этом такие же колебания возбуждаются в промежуточном слое и в верхней пьезопленке. На противоположных поверхностях последней возникает разность потенциалов. Напряжение с верхней пленки подается на усилитель и синхронный детектор, формирующий выходной сигнал с учетом амплитуды и фазы. При воздействии на верхнюю пленку деформирующей силы, характеристики всех слоев изменяются, что приводит к пропорциональному изменению выходного сигнала Пьезорезонансные датчики силы В датчиках силы этого типа используются оба эффекта, свойственные пьезокристаллическим материалам: прямой и обратный пьезоэффекты. Чувствительным элементом датчика является механический резонатор. Колебания резонатора, возбуждаемые напряжением питающего генератора (обратный пьезоэффект), обуславливают его напряженное состояние. В свою очередь такое состояние вызывает возникновение соответствующих зарядов на электродах пьезоэлемента (прямой пьезоэффект). Результатом одновременного электрического возбуждения колебаний резонатора и снятия электрического сигнала является возникновение резонансных колебаний. Известно несколько вариантов включения пьезорезонансных датчиков силы в измерительные схемы. В схемах с применением автогенераторов резонатор используется в задающих цепях. Деформация резонатора внешней силой изменяет частоту генератора пропорционально приложенному усилию. В другом варианте такой же схемы внешнее воздействие вызывает изменение положения электродов относительно резонатора, что также приводит к изменению частоты. На рис. приведена схема с использованием генератора опорной частоты и резонансного фильтра. Деформирующая сила, воздействуя на резонатор, приводит к изменению частотных настроек фильтра и пропорциональному изменению выходного напряжения. 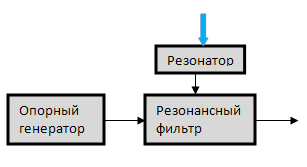 Рис. . Схема датчика силы с резонансным фильтром Тензометрические датчики силы (динамометры) являются неотъемлемым компонентом весоизмерительных систем. Они служат «поставщиком» исходных данных в системах автоматического учета и контроля экономической деятельности любого серьезного предприятия. Без них невозможно построение систем автоматизации технологическими процессами. Сфера их применения – металлургия, строительство, сельское хозяйство, производство пищевых продуктов и т. д. Обобщенная картина использования датчиков силы отображена на рис.1. 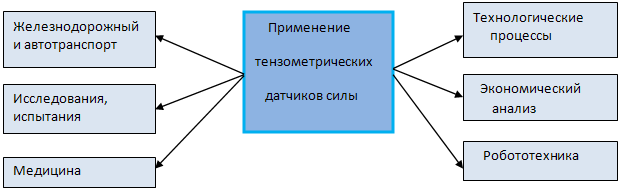 Рис. . Области применения датчиков силы Принцип работы датчиков силы базируется на преобразовании усилий, приводящих к деформации чувствительного элемента, в электрический сигнал. Процесс преобразования включает ряд последовательных операций. Они протекают на физическом и электрическом уровнях. На физическом уровне приложенная сила вызывает деформацию упругого элемента и закрепленного на нем тензодатчика. На электрическом уровне происходит преобразование величины деформации в аналоговый сигнал. В последующих операциях сигнал преобразуется в удобную для пользования форму. Работа тензометрических датчиков базируется на различных физических явлениях, позволивших создать следующие типы датчиков: Резистивные; Магнитные; Тактильные; Пьезорезонансные; Емкостные; Пьезоэлектрические. Естественно, что разные физические явления для преобразования величины деформации в электрический сигнал используют различные чувствительные элементы. Ознакомимся с принципами их работы. Резистивные датчики силы Из предложенных к рассмотрению датчиков наиболее применяемыми (более 95 %) являются резистивные датчики силы. Это обусловлено широким диапазоном воспринимаемых усилий (5 Н – 5 МН) и точностью измерения. Они могут использоваться при действии статических и динамических нагрузок. Существенным достоинством этого типа датчиков является линейность выходного сигнала. Чувствительным элементом датчика является тензорезистор (рис. 2). Датчик представляет собой тонкую проволоку 1, жестко закрепленную на гибкой подложке 2. 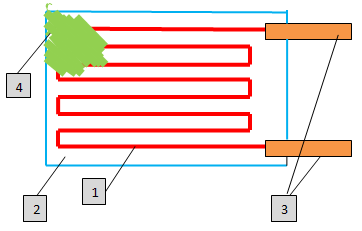 Рис. . Проволочный тензорезистор 1 – чувствительный элемент, 2 – подложка, 3 – выводы, 4 – защитная пленка Концы проволоки снабжены выводами 3 для внешних подключений. Зигзагообразно уложенная проволока и места соединения ее с выводами закрыты защитной пленкой 4. Тензорезистор подложкой приклеивается к упругому элементу, воспринимающему нагрузку. Последний под действием силы деформируется и вызывает деформацию тензорезистора. Изменение длины проволоки при действии сил растяжения или сжатия приводит к пропорциональному изменению величины ее сопротивления. Связь между величиной деформации тела и действующей на него силой подчиняется закону Гука. Автор первоначально сформулировал его словами: «каково удлинение, такова и сила». В отношении тензорезистивных датчиков, учитывая изложенное, этот закон можно интерпретировать так: «каково сопротивление, такова и сила». Обычно тензорезисторы включаются в плечи чувствительных мостовых схем. В этом случае о действующей силе судят по напряжению в диагонали моста. Распределенные информационные системы в мехатронике. Датчик как источник измерительной информации, структура информационных датчиков. Контактные бесконтактные виды датчиков. Датчик – это элемент измерительного, сигнального, регулирующего или управляющего устройства, преобразующий контролируемую величину (температуру, давление, частоту, силу света, электрическое напряжение, ток и т.д.) в сигнал, удобный для измерения, передачи, хранения, обработки, регистрации, а иногда и для воздействия им на управляемые процессы. Датчик — совокупность измерительных преобразователей, объединенных в один конструктивный узел, выносимый на объект измерении. В общем случае датчик может состоять из нескольких преобразователей    Пр1 Пр1 Пр1 F1 F2 F3 U Рис. 1.1. Функциональная схема датчика: Пр1, Пр2, Пр3 — преобразователи; F1 — входная физическая величина; F2, F3 промежуточные физическиевеличины;U—выходнойэлектрическийсигнал Любой датчик является преобразователем энергии. Вне зависимости от типа измеряемой величины всегда происходит передача энергии от исследуемого объекта к датчику. Работа датчика — это особый случай передачи информации, а любая передача информации связана с передачей энергии . Различают три класса датчиков: аналоговые датчики, т. е. датчики, вырабатывающие аналоговый сигнал, пропорционально изменению входной величины; цифровые датчики, генерирующие последовательность импульсов или двоичное слово; бинарные (двоичные) датчики, которые вырабатывают сигнал только двух уровней. Измерительный преобразователь является средством измерения и для него могут нормироваться технические и метрологические характеристики. Датчиком иногда называют средство измерений, представляющее собой конструктивно завершенное устройство, размещаемое в процессе измерения непосредственно в зоне исследуемого объекта и выполняющее функцию измерительного преобразователя. Несмотря на почти полное совпадение смысла терминов «датчик» («сенсор», «чувствительный элемент») и «первичный преобразователь», между ними существуют также и некоторые смысловые и содержательные отличия. Датчик (сенсор, чувствительный элемент) чувствует (физическую величину), а преобразователь преобразует (в том числе и физическую величину). Причем «чувствовать» в данном случае означает преобразовывать физическую величину к виду, удобному для дальнейшего использования или восприятия. Обычно это электрический сигнал, который легко преобразовать, например, в показания индикатора. Однако это может быть и неэлектрический сигнал, а изменение цвета (например, раствора или лакмусовой бумаги), которое может быть связано с наличием какого-то вещества в растворе или газе. Понятие «преобразовывать» имеет, как мы уже отмечали, более широкий смысл. По физическому принципу действия датчики (преобразователи) могут быть физическими (электрические, магнитные, тепловые, оптические, акустические и т.п.), химическими и комбинированными (физико-химические, электрохимические, биоэлектрические и т.п.). Принцип действия датчика определяется прежде всего тем, какая закономерность используется в нем. Однако существуют датчики, которые не относятся ни к одному из перечисленных классов, например, механоэлектрические. Эти датчики называются комбинированными. По виду выходной величины и необходимости внешнего источника энергиидатчики можно разделить на генераторные (активные), выходной величиной которых являются электрические величины (напряжение, заряд, ток, электродвижущая сила (ЭДС), и параметрические (пассивные), выходной величиной которых является сопротивление, индуктивность, емкость, диэлектрическая или магнитная проницаемость и т.п.В генераторных датчиках внешний источник энергии не нужен. Например, в пьезоэлектрическом датчике под действием измеряемого усилия на электродах пьезоэлемента возникает электрический заряд (или электрическое напряжение). В параметрических датчиках под действием измеряемой физической величины меняется какой-либо из параметров (например, электрическое сопротивление в тензорезисторах). Для получения выходного электрического сигнала требуется источник энергии (тока или напряжения). Таким образом, датчики могут иметь (или не иметь) вспомогательный источник энергии. По характеру преобразования значений физической величины датчики делят на две группы: датчики непрерывного действия; датчики дискретного (циклического) действия. По типу взаимодействия с объектом и количеству элементов датчики мо- гут быть: стационарными или подвижными; контактными или бесконтактными; Контактные датчики — это простейший вид резисторных датчиков, которые преобразуют перемещение первичного элемента в скачкообразное изменение сопротивления электрической цепи. С помощью контактных датчиков измеряют и контролируют усилия, перемещения, температуру, размеры объектов, контролируют их форму и т. д. К контактным датчикам относятся путевые и концевые выключатели, контактные термометры и так называемые электродные датчики, используемые в основном для измерения предельных уровней электропроводных жидкостей. Контактные датчики могут работать как на постоянном, так и на переменном токе. В зависимости от пределов измерения контактные датчики могут быть одно предельными и многопредельными. Недостаток контактных датчиков — сложность осуществления непрерывного контроля и ограниченный срок службы контактной системы. Но благодаря предельной простоте этих датчиков их широко применяют в системах автоматики. Бесконтактный датчик, также сенсорный выключатель (англ. proximitysensor) — позиционный выключатель, срабатывающий без механического соприкосновения с подвижной частью (машины). Позиционный выключатель — автоматический выключатель цепей управления, механизм управления которого приводится в действие при достижении подвижной частью машины заданного положения. Отсутствие механического контакта между воздействующим объектом и чувствительным элементом обеспечивает ряд специфических свойств устройства. Бесконтактные датчики применяются в различных задачах, где требуется информация о положении объекта относительно датчика сигнала. По принципу действия бесконтактные датчики бывают индуктивными, емкостными и оптическими. Разделяются датчики по своим физическим размерам, расстоянию срабатывания, частоте срабатывания и питающему напряжению. Характеристики датчиков Передаточная функция - Для каждого датчика можно вывести идеальное или теоретическое соотношение, связывающее сигналы на его входе и выходе. Соотношение между входным и выходным сигналом можно выразить в виде либо таблицы, либо графика, либо математического выражения. Это идеальное (теоретическое) выражение часто называют передаточной функцией. Передаточная функция устанавливает взаимосвязь между выходным электрическим сигналом датчика S и внешним воздействием s: S =f(s). Эта функция может быть, как линейной, так и нелинейной (например, логарифмической, экспоненциальной или степенной), многомерной или одномерной. Максимальный входной сигнал- Динамический диапазон внешних воздействий, который датчик может воспринять, называется диапазоном измеряемых значений. Эта величина показывает максимально возможное значение входного сигнала, которое датчик может преобразовать в электрический сигнал, не выходя за пределы допустимых погрешностей. Для датчиков с очень широкой и нелинейной амплитудно-частотной характеристикой (АЧХ) динамический диапазон внешних воздействий часто выражается в децибелах, которые являются логарифмической мерой отношений либо мощности, либо напряжений. Диапазон выходных значений -- алгебраическая разность между электрическими выходными сигналами, измеренными при максимальном и минимальном внешнем воздействии. В эту величину должны входить все возможные отклонения от идеальной передаточной функции. Точность - очень важная характеристика любого датчика. Когда говорят о точности датчика, чаще всего подразумевают его неточность или погрешность измерений. Под погрешностью измерений, как правило, понимают величину максимального расхождения между показаниями реального и идеального датчиков. Измеренное значение соответствует реальному с определенной степенью достоверности. На точность датчиков влияют такие характеристики как: гистерезис, мертвая зона, параметры калибровки, повторяемость датчиков от партии к партии и воспроизводимость погрешностей. Калибровка-Если производственные допуски на датчик и допуски на интерфейс (схемы преобразования сигналов) превышают требуемую точность системы, всегда необходимо проводить калибровку. В процессе проведения полной калибровки определяются коэффициенты, описывающие передаточную функцию всей системы в целом, включая датчик, интерфейсное устройство и АЦП. Ошибка калибровки -- это погрешность, допущенная производителем при проведении калибровки датчика на заводе. Эта погрешность носит систематический характер, и, значит, добавляется ко всем реальным передаточным функциям. Ошибка калибровки сдвигает характеристику преобразования датчика в каждой точке на определенную величину. Она необязательно должна быть равномерной во всем диапазоне измерений и может зависеть от типа ошибки, допущенной в процессе калибровки. Гистерезис -- это разность значений выходного сигнала для одного и того же входного сигнала, полученных при его возрастании и убывании. Типичной причиной возникновения гистерезиса является трение и структурные изменения материалов. Нелинейность Нелинейность определяется для датчиков, передаточную функцию которых возможно аппроксимировать прямой линией. Под нелинейностью понимается максимальное отклонение L реальной передаточной функции от аппроксимирующей прямой линии. Под термином «линейность» на самом деле понимается «нелинейность». Насыщение Каждый датчик имеет свои пределы рабочих характеристик. Даже если он считается линейным, при определенном уровне внешнего воздействия его выходной сигнал перестанет отвечать приведенной линейной зависимости. В этом случае говорят, что датчик вошел в зону нелинейности или в зону насыщения Мёртвая зона -- это нечувствительность датчика в определенном диапазоне входных сигналов. В пределах этой зоны выходной сигнал остается почти постоянным (часто равным нулю). Динамические характеристики Динамические свойства датчиков зачастую определяют быстродействие всего измерительного устройства. Имеются методы коррекции динамических характеристик путем введения обратных связей по производным от входной величины и других приемов, позволяющих на порядок уменьшить инерционность устройств. |