Гос экзамен по специальности Приборостроение. Ответы на вопросы ГОС экзамена. Тактильные датчики применяют для обнаружения объекта, установления момента
 Скачать 1.42 Mb. Скачать 1.42 Mb.
|

Применение[править | править код]УВ применяют для армирования композиционных, теплозащитных, химостойких и других материалов в качестве наполнителей в различных видах углепластиков. Наиболее ёмкий рынок для УВ в настоящее время — производство первичных и вторичных структур в самолетах различных производителей, в том числе таких компаний как «Boeing» и «Airbus» (до 30 тонн на одно изделие). По причине резко возросшего спроса в 2004—2006 гг. на рынке наблюдался большой дефицит волокна, что привело к его резкому подорожанию. Из УВ изготавливают электроды, термопары, экраны, поглощающие электромагнитное излучение, изделия для электро- и радиотехники. На основе УВ получают жёсткие и гибкие электронагреватели, в том числе ставшие популярными т. н. «карбоновые нагреватели», обогревающие одежду и обувь. Углеродный войлок — единственно возможная термоизоляция в вакуумных печах, работающих при температуре 1100 °C и выше. Благодаря химической инертности углеволокнистые материалы используют в качестве фильтрующих слоёв для очистки агрессивных жидкостей и газов от дисперсных примесей, а также в качестве уплотнителей и сальниковых набивок. УВА и углеволокнистые ионообменники служат для очистки воздуха, а также технологических газов и жидкостей, выделения из последних ценных компонентов, изготовления средств индивидуальной защиты органов дыхания. Широкое применение находят УВА (в частности, актилен) в медицине для очистки крови и других биологических жидкостей. В специальных салфетках для лечения гнойных ран, ожогов и диабетических язв незаменима ткань АУТ-М, разработанная в начале 80-х годов и опробованная при боевых действиях в Афганистане[3]. Как лекарственное средство применяют при отравлениях (благодаря высокой способности сорбировать яды. Например, препарат «Белосорб», или АУТ-МИ на основе светлогорского сорбента), как носители лекарственных и биологически активных веществ. УВ-катализаторы используют в высокотемпературных процессах неорганического и органического синтеза, а также для окисления содержащихся в газах примесей (СО до CO2, SO2 до SO3 и др.). Широко применяется при изготовлении деталей кузова в автоспорте, а также в производстве спортивного инвентаря (клюшки, вёсла, лыжи, велосипедные рамы и компоненты, обувь) и т. д. Углеволокно применяется в строительстве в различных системах внешнего армирования (СВА) — при его помощи усиливают железобетонные, металлические, каменные и деревянные конструктивные элементы зданий и сооружений с целью устранения последствий разрушения материала и коррозии арматуры в результате длительного воздействия природных факторов и агрессивных сред в процессе эксплуатации, а также для сейсмоусиления. Суть данного метода заключается в повышении прочности элементов, воспринимающих нагрузки в процессе эксплуатации зданий и сооружений, с помощью углеродных тканей, ламелей и сеток. Усиление строительных конструкций углеволокном повышает несущую способность без изменения структурной схемы объекта Оптоэлектронные датчикиОптоэлектронные датчики (ОЭД), часто их называют фотодатчиками, относятся к наиболее универсальным датчикам. Они позволяют измерять многие физические величины: давление, перемещение, скорость, ускорение, температуру, химический состав, магнитные поля и т.п. Фотодатчики предназначены для регистрации световых потоков в оптическом диапазоне длин волн и широко используются в метрологии, системах управления, робототехнике, системах технического зрения, различных сенсорах и охранных системах. Диапазон спектральной чувствительности фотодатчиков простирается от рентгеновского излучения до радиоволн, т. е. эти датчики перекрывают диапазон длин волн в шесть порядков (10_3-ь103) мкм (рис. 3.1). 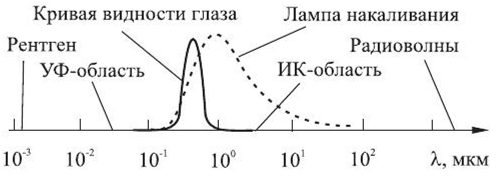 Рис. 3.1. Оптический спектральный диапазон Как известно, частота излучения связана с длиной волны X (в среде) соотношением  где V — скорость распространения света в среде с показателем преломления п (в воздухе п * 1); с — скорость распространения света в вакууме. Подставив значения величин, получим (для Х= 1 мкм)  Как видим, свет — это излучение очень высокой частоты. Короткие длины волн в оптическом диапазоне спектра обусловливают высокое разрешение фотодатчиков. С другой стороны, световое излучение (поток фотонов) переносит энергию и характеризуется не только волновыми, но и энергетическими характеристиками: мощностью Р [Вт] и световым потоком Ф [лм], которые и регистрируются фотоприемниками. ОЭД могут быть двух типов — пассивными и активными. Пассивные датчики регистрируют внешнее излучение от различных объектов. Типичные примеры пассивных датчиков: датчики для регистрации теплового излучения (балометры, пирометры, тепловизоры), датчики изображений, датчики в астрономических приборах. Активные датчики регистрируют излучение своего собственного источника, промодулированное внешним воздействием. Типичные примеры: лазерные дальномеры, интерферометры, триангуляционные датчики расстояний, щелевые датчики и энкодеры, датчики штрихкода, волоконно-оптические датчики, растровые датчики перемещений. В состав активных ОЭД в простейшем случае входят излучатель, фотоприемник и пороговое устройство, например, как в датчике дыма, регистрирующем излучение, рассеянное от продуктов горения (рис. 3.2). 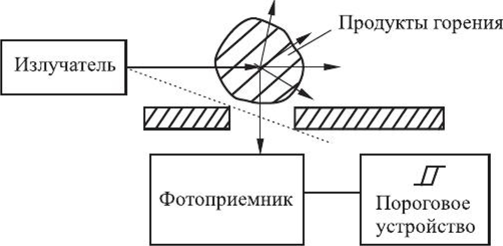 Рис. 3.2. Датчик дыма В общем случае, помимо оптических элементов, ОЭД может включать изготовленные в едином технологическом цикле (интегрированные) схемы запитки излучателя, фотоусилитель и схему обработки фотосигнала (рис. 3.3). Отсюда появился термин микрофотоэлектроника. Структуре на рис. 3.3 соответствуют широко распространенные датчики щелевого типа, регистрирующие появление предметов в зоне между излучателем и фотоприемником. 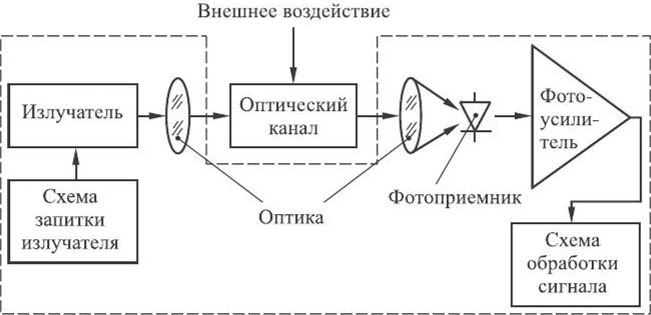 Рис. 3.3. Структура активного ОЭД ОЭД открывают широкие возможности для определения химического состава оптически прозрачных газов и жидкостей, что имеет важное значение в контроле технологических процессов, медицине, экологии, спектроскопии. Например, для определения содержания воды в топливе достаточно сравнить поглощение на определенной длине волны эталонного и исследуемого образцов топлива. Аналогичным образом можно оперативно определить и состав выхлопных газов автомобиля. Для измерительной техники наибольший интерес представляет видимый диапазон, а также ближняя и средняя ИК-области (0,7-ь15 мкм), для которых могут быть использованы серийные твердотельные излучатели и фотоприемники. Фотоприемники Основными элементами фотодатчиков являются фотоприемники и излучатели. В соответствии с механизмом возникновения фоточувствительности фотоприемники делятся на два больших класса: квантовые (или фотонные) и тепловые. В квантовых фотоприемниках фоточувствительность возникает за счет непосредственного поглощения фотонов материалом фотоприемника, а в тепловых — в результате промежуточного преобразования в тепло. Эти фотоприемники существенно различаются по быстродействию и областям спектральной чувствительности. В настоящее время наиболее распространенными и перспективными типами полупроводниковых фотоприемников являются фоторезисторы, фотодиоды и фототранзисторы, балометры, пироприемники, термоэлектрические фотоприемники и координатно-чувствительные фотодатчики. Среди излучателей доминируют полупроводниковые светодиодные излучатели видимого и ИК-диапазонов (некогерентные источники) и полупроводниковые лазеры (когерентные источники). Системы силомоментного очувствления. Назначение силомоментных датчиков, технические характеристики и особенности их применения. Силомоментные системы очувствления – это сенсорные устройства, обеспечивающие изменение компонент вектора силы и вектора момента сил, развиваемых роботом в процессе взаимодействия с изделием в проекции на некоторую систему координат. 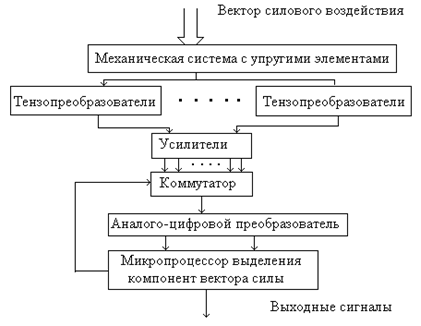 Средства очувствления контактного действия, которые измеряют действующие на манипулятор силы и моменты, а также фиксируют координаты точек их приложения, представлены системами силомоментного и тактильного очувствления [6]. Создание силомоментных систем вызвано необходимостью измерения сил и моментов в процессе взаимодействия схвата или инструмента с объектом манипулирования при выполнении, например, механической обработки, абразивной зачистки и шлифовки изделий. Применение силомоментных систем очувствления позволяет автоматизировать указанные технологические операции при минимуме затрат на разработку и создание дополнительного оборудования, например, конвейеров и позиционеров, обеспечивающих высокую точность начальной установки собираемых деталей. Эти же системы очувствления могут быть с успехом использованы также и для решения многих манипуляционных задач, особенно при работе с жесткими деталями, когда незначительные погрешности позиционирования могут вызвать большие усилия, которые трудно проконтролировать другими средствами. Силомоментные системы очувствления состоят из датчика и устройства предварительной обработки информации. В общем случае они обеспечивают измерение трех проекций силы и трех проекций векторов моментов, возникающих при взаимодействии схвата или инструмента с обрабатываемой деталью. Датчики силомоментного очувствления размещают либо непосредственно на губках схвата, либо между последним звеном манипулятора и схватом. Датчики проскальзывания (роликовые, индукционные и оптоэлектронные). Тактильные датчики проскальзывания устанавливают в захватное устройство и используют для обеспечения заданного усилия сжатия, особенно при манипулировании хрупкими предметами. Основным достоинством тактильных датчиков проскальзывания является высокое быстродействие (время срабатывания не превышает 0,1 мкс). Необходимость в датчиках проскальзывания появляется тогда, когда манипулятор работает с крупным предметами и необходимостью обеспечить минимальные усилия для удерживания предмета. Поскольку момент начала проскальзывания предугадать невозможно, то датчик проскальзывания (ДП) и система управления схватом должны быть быстродействующими. Различают 3 способа определения проскальзывания: 1. Колебания; 2. Преобразование проскальзывания во вращательное движение; 3. Метод основаный на перераспределении усилий между сжимаемыми поверхностями 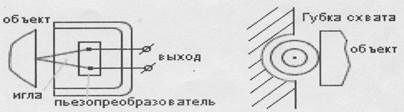 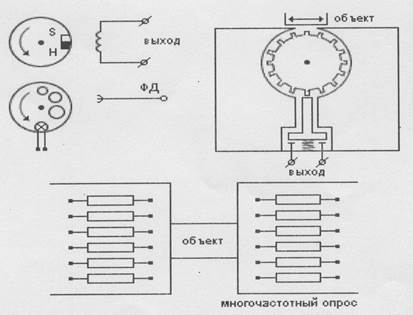 Рис. 9 ДАТЧИКИ ПРОСКАЛЬЗЫВАНИЯ Вместо пьезопреобразования может быть электромагнит, тогда обычно игла заменяется колесиком. Человек чрезвычайно экономно расходует свою энергию, осуществляя захват и перемещение объекта. Например, перед выполнением каких-либо манипуляций со стаканом, наполненным водой, человек оценивает на вид размер стакана и количество содержащейся в нем жидкости, определяет ориентировочно величину и вес стакана. Все это он проделывает, опираясь на свой житейский опыт. Исходя из этой априорной информации, он сжимает стакан с усилием, необходимым только для его удержания. Человек регулирует усилие сжатия стакана, исходя из его веса, и уменьшает усилие до минимально необходимого, при котором стакан не проскальзывает между пальцами. Подобный метод захвата и удерживания объекта схватом манипулятора был использован в датчике запястья схвата с целью мгновенной оценки массы объекта манипулирования. Эффективным оказалось также применение датчиков проскальзывания на губках схвата, имитирующих обнаружение кожным покровом руки человека малейшего проскальзывания объекта под действием его веса. Разработан ряд датчиков проскальзывания для управления схватом робота, имеющих конструкцию, подобную приведенной на рис. 5.19, б. Как следует из рисунка, объект манипулирования удерживается в схвате роликом, слегка выступающим с внутренней стороны одной из губок. Ролик может прокручиваться, но не свободно из-за пружины, препятствующей его вращению. Угол поворота ролика автоматически определяется с помощью запрессованного в него магнита и неподвижной магнитной головки. Такая конструкция датчика проскальзывания позволяет определять вес объекта по величине его проскальзывания при сжатии объекта губками. На этом же рисунке показан датчик давления (тензодатчик на внутренней стороне противоположной губки) для регулирования усилия захвата объекта.  Рис. 5.19. Система управления схватом робота с использованием датчика проскальзывания. а - система управления; б - устройство датчика: 1 - ролик; 2 - магнит; 3 - магнитная головка; 4 - датчик проскальзывания; 5 - тензодатчик; 6 - датчик давления; в - зависимость выходного сигнала датчика от величины его линейного смещения Индуктивный датчик — бесконтактный датчик, предназначенный для контроля положения объектов из металла (к другим материалам не чувствителен). Индуктивные датчики широко используются для решения задач АСУ ТП. Выполняются с нормально разомкнутым или нормально замкнутым контактом.  Индуктивный бесконтактный датчик Принцип действия основан на изменении параметров магнитного поля, создаваемого катушкой индуктивности внутри датчика. Локационные датчики и их назначение. Классификация, принцип действия, обобщенная структура. Используют для измерения, когда применение СТЗ нецелесообразно или невозможно. Применяют в качестве датчиков безопасности для предотвращения столкновения подвижных частей манипулятора с предметами, позволяет обеспечить измерение таких параметров, как расстояние до объектов, скорость движения, их размеры, обнаружение препятствий, а также исследование механических, электрофизических, акустических и других параметров объектов. В качестве дополнительных параметров измерения могут выступать зазоры, перекосы, твердость, толщина материала или покрытия, проскальзывание, наличие внутренних дефектов и многие другие. Локационными системами очувствления называются сенсорные устройства, позволяющие роботу, используя принципы пассивной или активной локации, обнаруживать подвижные и неподвижные объекты, координаты которых известны с большой погрешностью, определять их местонахождение, а также осуществлять наведение и захват этих объектов. Локационные информационные системы (ЛС) относятся к устройствам бесконтактного действия и реализуют бионическую функцию слуха. Информативным параметром этих систем является модулированная волна различной физической природы, характеристики которой определяются интегральными свойствами среды распространения. В зависимости от пространственно-временных свойств среды различают потенциальные (например, электростатические) и вихревые (электромагнитные и акустические) поля. Классификация ЛС 1 электромагнитные 2 акустические 3 оптические С помощью акустических датчиков могут быть обнаружены внутренние дефекты изделий, измерены их толщина и акустические характеристики материала. Позволяют сравнительно простым программным путем в режиме «реального времени» получить интегральную оценку формы поверхности, провести классификацию объектов. Погрешность измерений: линейная до 2 % на расстоянии до 200 см; угловая до ±17°; чувствительность (удаленность объекта), см: 20-1000; обнаруживаемые и измеряемые объекты: из любых материалов. Преимущества: возможность использования при работе в газовой среде, и в условиях, затрудняющих или исключающих применение оптических средств (сильно задымленный воздух, наличие пара, оптических помех от электросварки и т. п.), долговечность. Недостатки: ограничена способность обнаружения малых тел, низкая точность по сравнению с датчиками других типов. Оптические локационные датчики основаны на эффектах взаимодействия света с поверхностью объекта (отражение, поглощение, рассеяние и т. д.) и предназначены для обнаружения объектов в рабочей зоне адаптивного робота и определения таких параметров, как координаты объекта, его герметические размеры, цвет, структура поверхности и др. Погрешность измерений: ±2,0 мм на расстоянии до 200 см; чувствительность (удаленность объекта), см: до 200 и более; обнаруживаемые и измеряемые объекты: непрозрачные. Преимущества: На точность измерения не влияет размер и скорость перемещения объекта; Недостатки: Работоспособность зависит от освещенности, запыленности и других факторов среды. Низкий срок службы и прочность источников света и светоприемников Электромагнитные преобразователи применяют для измерения следующих величин: расстояний до металлического объекта, угловых перемещений металлического объекта или его узлов, толщины покрытий или объекта, вибраций (смещений, скорости, ускорений) металлических объектов, механических напряжений в металлическом объекте, а также для обнаружения металлических объектов, нарушений сплошности их материала и структуры материала. Наиболее перспективно применение электромагнитных преобразователей для определения деталей или однотипных узлов из стали той или иной марки, особенно в условиях массового производства и на сборочных операциях. Погрешность измерений: ±(0,01-8,0) мм; чувствительность (удаленность объекта), см: £ 12; Обнаруживаемые и измеряемые объекты: металлические. Преимущества: хорошее быстродействие, высокая чувствительность, статическая точность, надежно работают при воздействии мешающих факторов — повышен- ной температуре, интенсивном световом излучении, загрязненности воздуха и поверхности свариваемых изделий, прочность, малые размеры. Недостатки: точность зависит от размера, свойств объекта и скорости его перемещения. Взаимодействуют только с металлическими объектами. |