Гос экзамен по специальности Приборостроение. Ответы на вопросы ГОС экзамена. Тактильные датчики применяют для обнаружения объекта, установления момента
 Скачать 1.42 Mb. Скачать 1.42 Mb.
|

|
Numerator — Вектор или матрица коэффициентов числителя Denominator – Вектор коэффициентов знаменателя Sample time — Шаг дискретизации по времени. Порядок числителя не должен превышать порядок знаменателя. Входной сигнал блока должен быть скалярным. В том случае, если коэффициенты числителя заданы вектором, то выходной сигнал блока будет скалярным (также как и входной сигнал). На рис. 9.4.6 показан пример использования блока Discrete Transfer Fcn. В примере рассчитывается реакция на единичное ступенчатое воздействие дискретного аналога колебательного звена: Шаг дискретизации выбран равным 0.5 с.  Рис. 9.4.6. Использование блока Discrete Transfer Fcn [Скачать пример] 9.4.6. Блок дискретной передаточной функции Discrete Zero-Pole Назначение: Блок Discrete Zero-Pole определяет дискретную передаточную функцию с заданными полюсами и нулями: где Z – вектор или матрица нулей передаточной функции, P – вектор полюсов передаточной функции, K – коэффициент передаточной функции, или вектор коэффициентов, если нули передаточной функции заданы матрицей. При этом размерность вектора K определяется числом строк матрицы нулей. Параметры: Zeros – Вектор или матрица нулей. Poles – Вектор полюсов. Gain – Скалярный или векторный коэффициент передаточной функции. Sample time — Шаг дискретизации по времени. Количество нулей не должно превышать число полюсов передаточной функции. В том случае, если нули передаточной функции заданы матрицей, то блок Discrete Zero-Pole моделирует векторную передаточную функцию. Нули или полюса могут быть заданы комплексными числами. В этом случае нули или полюса должны быть заданы комплексно-сопряженными парами полюсов или нулей, соответственно. Начальные условия при использовании блока Discrete Zero-Pole полагаются нулевыми. На рис. 9.4.7 показан пример использования блока Discrete Zero-Pole. С помощью рассматриваемого блока моделируется дискретный аналог передаточной функции Шаг дискретизации выбран равным 0.5 с.  Рис. 9.4.7. Использование блока Discrete Zero-Pole. [Скачать пример] 9.4.7. Блок дискретного фильтра Discrete Filter Назначение: Блок дискретного фильтра Discrete Filter задает дискретную передаточную функцию от обратного аргумента (1/z): m+1и n+1 – количество коэффициентов числителя и знаменателя, соответственно. num – вектор или матрица коэффициентов числителя, den – вектор коэффициентов знаменателя. Параметры: Numerator — Вектор или матрица коэффициентов числителя Denominator –Вектор коэффициентов знаменателя Sample time — Шаг дискретизации по времени. На рис. 9.4.8 показан пример использования блока Discrete Filter. С помощью рассматриваемого блока моделируется дискретный аналог передаточной функции: Шаг дискретизации выбран равным 0.5 с.  Рис. 9.4.8. Использование блока Discrete Filter. [Скачать пример] 9.4.8. Блок модели динамического объекта Discrete State-Space Назначение: Блок создает динамический объект, описываемый уравнениями в пространстве состояний: где x – вектор состояния, u – вектор входных воздействий, y – вектор выходных сигналов, A, B, C, D - матрицы: системы, входа, выхода и обхода, соответственно, n – номер шага моделирования. Размерность матриц показана на рис. 9.4.9 (n – количество переменных состояния, m – число входных сигналов, r – число выходных сигналов).  Рис. 9.4.9. Размерность матриц блока Discrete State-Space Параметры: A –Матрица системы. B – Матрица входа. C – Матрица выхода D – Матрица обхода Initial condition – Вектор начальных условий. Sample time — Шаг дискретизации по времени. На рис. 9.4.10 показан пример моделирования динамического объекта с помощью блока Discrete State-Space. Матрицы блока имеют следующие значения:   Рис. 9.4.10. Пример использования блока Discrete State-Space. Блоки разделов библиотеки Simulink: Ports & Subsystems, Math Operations Порты и подсистемы Ports & Subsystems 1. Subsystem, Atomic Subsystem – виртуальная и неделимая подсистемы. 2. Enabled Subsystem, Enabled – управляемая наличием сигнала подсистема и ее блок управления. 3. Triggered Subsystem, Trigger – управляемая фронтом сигнала подсистема и ее блок управления. 4. Enabled and Triggered Subsystem – управляемая уровнем и фронтом сигна# ла подсистема. 5. Function Call Subsystem – управляемая функцией подсистема и ее блок управления. 6. Function Call Generator – внешний блок управления FC#подсистемой. 7. If – блок условного оператора. 8. Switch Case – блок переключателя. 9. If Action Subsystem – управляемая условием подсистема. 10. Switch Case Action Subsystem – переключаемая подсистема. 11. For Iterator Subsystem – управляемая циклом For подсистема. 12. While Iterator Subsystem – управляемая циклом While подсистема. 13. Configurable Subsystem – переконфигурируемая подсистема. 14. CodeReuse Subsystem – подсистема, имеющая общий код для всех ее эк# земпляров в модели. 15. Model – блок, обеспечивающий подключение файла к текущей модели. 16. In – входной порт. 17. Out – выходной порт. Блоки математических операций Math Operations 1. Abs – блок вычисления модуля. 2. Sum – сумматор (пиктограмма в виде окружности). 3. Product – умножитель. 4. Sign – определитель знака. 5. Gain, Matrix Gain – усилитель. 6. Slider Gain – ползунковый регулятор. 7. Dot Product – блок скалярного умножения векторов. 8. Math Function – математическая функция. 9. Trigonometric Function – тригонометрическая функция. 10. Complex to Real Image – блок вычисления действительной и (или) мнимой части комплексного числа. 11. Complex to Magnitude Angle – блок вычисления модуля и (или) аргумента комплексного числа. 12. Real Image to Complex – блок расчета комплексного числа по его действи# тельной и мнимой части. 13. Magnitude Angle to Complex – блок расчета комплексного числа по его мо# дулю и аргументу. 14. MinMax – блок вычисления максимального или минимального значения. 15. Rounding Function – блок округления числа. 16. Algebraic Constraint – блок алгебраического контура. 17. Assignment – блок присвоения элементам массива новых значений. 18. Matrix Concatenation – блок объединения сигналов в матрицу. 19. Reshape – преобразователь размерности сигнала. 20. Polynomial – степенной многочлен. 21. Add – сумматор (пиктограмма в виде прямоугольника). 22. Subtract – блок вычисления разности. 23. Sum of Elements – блок вычисления суммы элементов вектора. 24. Bias – смещение. 25. Product of Elements – блок вычисления произведения элементов вектора. 26. Weighted Sample Time Math – блок поддержки вычислений, использую# щих шаг дискретизации. 27. Divide – блок деления. 28. Unary Minus – унарный минус. 29. MinMax Running Resettable – блок вычисления максимального или мини# мального значения с возможностью сброса. 30. Sine Wave Function – синусоидальная функция. Блоки разделов библиотеки Simulink: Sinks, Sources, Signal Routing 1. Sources - источники сигналов 1.1. Источник постоянного сигнала Constant Назначение: Задает постоянный по уровню сигнал. Параметры: Constant value - Постоянная величина. Interpret vector parameters as 1-D – Интерпретировать вектор параметров как одномерный (при установленном флажке). Данный параметр встречается у большинства блоков библиотеки Simulink. В дальнейшем он рассматриваться не будет. Значение константы может быть действительным или комплексным числом, вычисляемым выражением, вектором или матрицей. Р 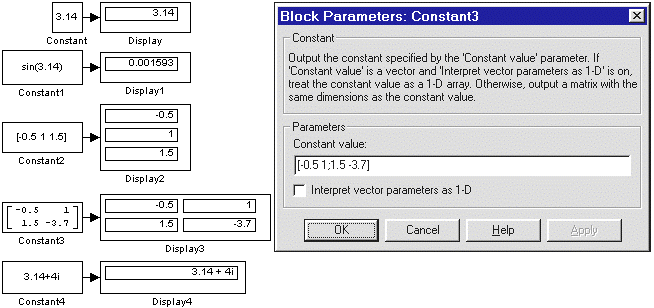 исунок иллюстрирует применение этого источника и измерение его выходного сигнала с помощью цифрового индикатора Display. исунок иллюстрирует применение этого источника и измерение его выходного сигнала с помощью цифрового индикатора Display. 1.2. Источник синусоидального сигнала Sine Wave Назначение: Формирует синусоидальный сигнал с заданной частотой, амплитудой, фазой и смещением. Для формирования выходного сигнала блоком могут использоваться два алгоритма. Вид алгоритма определяется параметром Sine Type (способ формирования сигнала): Time-based – По текущему времени. Sample-based – По величине шага модельного времени. 1.2.1. Формирование выходного сигнала по текущему значению времени для непрерывных систем Выходной сигнал источника в этом режиме соответствует выражению: y = Amplitude* sin(frequency* time + phase) + bias. Параметры: Amplitude - Амплитуда. Bias – Постоянная составляющая сигнала. Frequency (rads/sec) - Частота (рад/с). Phase (rads) - Начальная фаза (рад). Sample time – Шаг модельного времени. Используется для согласования работы источника и других компонентов модели во времени. Параметр может принимать следующие значения: 0 (по умолчанию) – Используется при моделировании непрерывных систем. > 0 (положительное значение) – Задается при моделировании дискретных систем. В этом случае шаг модельного времени можно интерпретировать как шаг квантования по времени выходного сигнала. -1 – Шаг модельного времени устанавливается таким же, как и в предшествующем блоке, т.е. блоке, откуда приходит сигнал в данный блок. Этот параметр может задаваться для большинства блоков библиотеки Simulink. В дальнейшем он рассматриваться не будет. При расчетах для очень больших значений времени точность расчета выходных значений сигнала падает вследствие значительной ошибки округления. 1.2.2. Формирование выходного сигнала по текущему значению времени для дискретных систем Алгоритм определения значения выходного сигнала источника для каждого последующего шага расчета определяется выражением (в матричной форме):  , ,где t – постоянная величина, равная значению Sample time. В данном режиме ошибка округления для больших значений времени также уменьшает точность расчета. 1.2.3. Формирование выходного сигнала по величине модельного времени и количеству расчетных шагов на один период Выходной сигнал источника в этом режиме соответствует выражению: y= Amplitude* sin[(k + Number of offset samples) / Samples per period] + bias , где k – номер текущего шага расчета. Параметры: Amplitude - Амплитуда. Bias – Постоянная составляющая сигнала. Samples per period – Количество расчетных шагов на один период синусоидального сигнала: Samples per period = 2 / (frequency* Sample time) Number of offset samples– Начальная фаза сигнала. Задается количеством шагов модельного времени: Number of offset samples = Phase* Samples per period/ (2). S  ample time – Шаг модельного времени. ample time – Шаг модельного времени. В данном режиме ошибка округления не накапливается, поскольку Simulink начинает отсчет номера текущего шага с нуля для каждого периода. На рисунке показано применение блока с разными значениями шага модельного времени (Sample time = 0 для блока Sine Wave 1и Sample time = 0.1 для блока Sine Wave 2). Для отображения графиков выходных сигналов в модели использован виртуальный осциллограф (Scope). 1 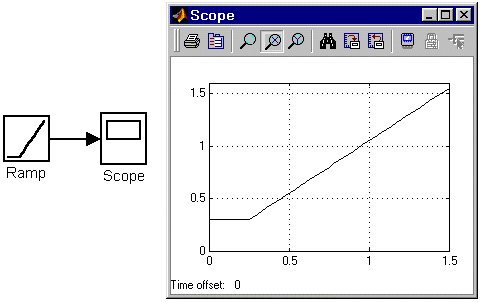 .3. Источник линейно изменяющегося воздействия Ramp .3. Источник линейно изменяющегося воздействия RampНазначение: Формирует линейный сигнал вида y = Slope* time + Initial value. Параметры: 1. Slope — Скорость изменения выходного сигнала. 2. Start time — Время начала формирования сигнала. 3. Initial value — Начальный уровень сигнала на выходе блока. 1.4. Генератор ступенчатого сигнала Step Н 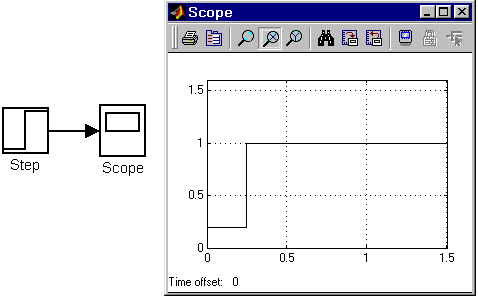 азначение: азначение:Формирует ступенчатый сигнал. Параметры: Step time - Время наступления перепада сигнала (с). Initial value - Начальное значение сигнала. Final value - Конечное значение сигнала. Перепад может быть как в большую сторону (конечное значение больше чем начальное), так и в меньшую (конечное значение меньше чем начальное). Значения начального и конечного уровней могут быть не только положительными, но и отрицательными (например, изменение сигнала с уровня –5 до уровня –3). 1.5. Генератор сигналов Signal Generator Н 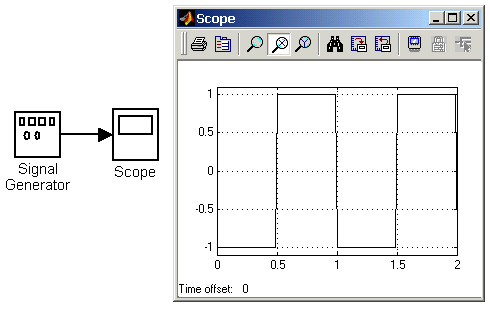 азначение: азначение:Формирует один из четырех видов периодических сигналов: sine — Синусоидальный сигнал. square — Прямоугольный сигнал. sawtooth — Пилообразный сигнал. random — Случайный сигнал. Параметры: Wave form – Вид сигнала. Amplitude – Амплитуда сигнала. Frequency - Частота (рад/с). Units – Единицы измерения частоты. Может принимать два значения: - Hertz - Гц. - rad/sec – рад/с. 1.6. Источник случайного сигнала с равномерным распределением Uniform Random Number Назначение: Формирование случайного сигнала с равномерным распределением. Параметры: Minimum – Минимальный уровень сигнала. Maximum – Максимальный уровень сигнала. Initial seed – Начальное значение. 1 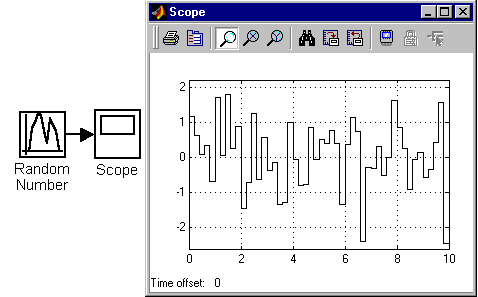 .7. Источник случайного сигнала с нормальным распределением Random Number .7. Источник случайного сигнала с нормальным распределением Random Number Назначение: Формирование случайного сигнала с нормальным распределением уровня сигнала. Параметры: Mean - Среднее значение сигнала Variance- Дисперсия (среднеквадратическое отклонение). Initial seed – Начальное значение. 1.8. Источник импульсного сигнала Pulse Generator Назначение: Формирование прямоугольных импульсов. Параметры: P  ulse Type – Способ формирования сигнала. Может принимать два значения: ulse Type – Способ формирования сигнала. Может принимать два значения:- Time-based – По текущему времени. - Sample-based – По величине модельного времени и количеству расчетных шагов. Amplitude — Амплитуда. Period — Период. Задается в секундах для Time-based Pulse Type или в шагах модельного времени для Sample-based Pulse Type. Pulse width — Ширина импульсов. Задается в в % по отношению к периоду для Time-based Pulse Type или в шагах модельного времени для Sample-based Pulse Type. Phase delay — Фазовая задержка. Задается в секундах для Time-based Pulse Type или в шагах модельного времени для Sample-based Pulse Type. Sаmple time — Шаг модельного времени. Задается для Sample-based Pulse Type. 1.9. Генератор линейно-изменяющейся частоты Chirp Generator Назначение: Формирование синусоидальных колебаний, частота которых линейно изменяется. П 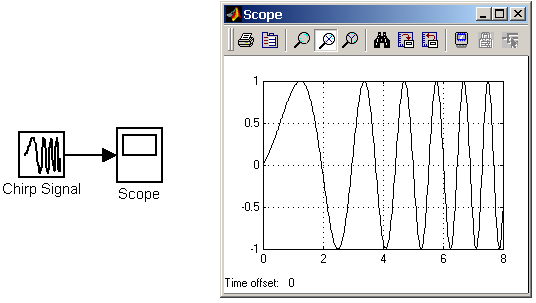 араметры: араметры: Initial frequence — Начальная частота (Гц); Target time — Время изменения частоты (с); Frequence at target time — Конечное значение частоты (Гц). 1.10. Генератор белого шума Band-Limited White Noice Н 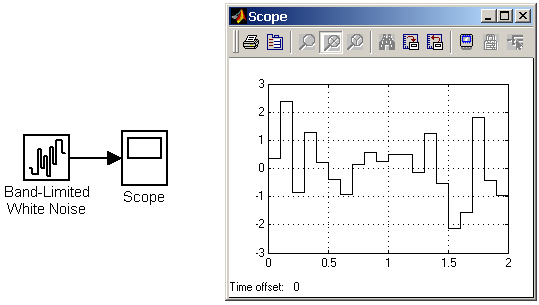 азначение: азначение:Создает сигнал заданной мощности, равномерно распределенной по частоте. Параметры: Noice Power – Мощность шума. Sample Time – Модельное время. Seed - Число, необходимое для инициализации генератора случайных чисел. 1.11. Источник временного сигнала Clock Назначение: Формирует сигнал, величина которого на каждом шаге расчета равна текущему времени моделирования. Параметры D  ecimation - Шаг, с которым обновляются показания времени на изображении источника (в том случае, если установлен флажок параметра Display time). Параметр задается как количество шагов расчета. Например, если шаг расчета модели в окне диалога Simulation parameters установлен равным 0.01 с, а параметр Decimation блока Clock задан равным 1000, то обновление показаний времени будет производиться каждые 10 с модельного времени. ecimation - Шаг, с которым обновляются показания времени на изображении источника (в том случае, если установлен флажок параметра Display time). Параметр задается как количество шагов расчета. Например, если шаг расчета модели в окне диалога Simulation parameters установлен равным 0.01 с, а параметр Decimation блока Clock задан равным 1000, то обновление показаний времени будет производиться каждые 10 с модельного времени. Display time - Отображение значения времени в блоке источника. 1.12. Цифровой источник времени Digital Clock Н 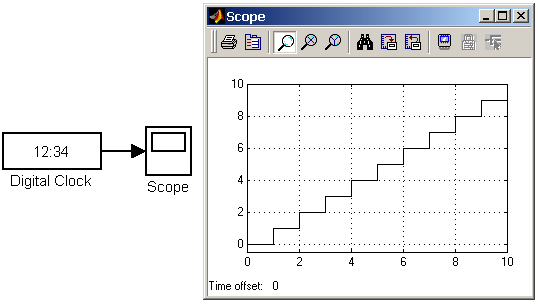 азначение: азначение:Формирует дискретный временной сигнал. Параметр: Sample time – Шаг модельного времени (с). 1.13. Блок считывания данных из файла From File Назначение: Получение данных из внешнего файла. Параметры: File Name - Имя файла с данными. Sample time - Шаг изменения выходного сигнала блока. Данные в файле должны быть представлены в виде матрицы:  . .Матрица должна состоять, как минимум, из двух строк. Значения времени записаны в первой строке матрицы, а в остальных строках находятся значения сигналов, соответствующие данным моментам времени. Значения времени должны быть записаны в возрастающем порядке. Выходной сигнал блока содержит только значения сигналов, а значения времени в нем отсутствуют. Если шаг расчета текущей модели не совпадает с отсчетами времени в файле данных, то Simulink выполняет линейную интерполяцию данных. Ф  айл данных (mat-файл), из которого считываются значения, не является текстовым. Структура файла подробно описана в справочной системе MATLAB. Пользователям Simulink удобнее всего создавать mat-файл с помощью блока To File (библиотека Sinks). На рисунке показан пример использования данного блока. Из файла data.mat считываются значения синусоидального сигнала. айл данных (mat-файл), из которого считываются значения, не является текстовым. Структура файла подробно описана в справочной системе MATLAB. Пользователям Simulink удобнее всего создавать mat-файл с помощью блока To File (библиотека Sinks). На рисунке показан пример использования данного блока. Из файла data.mat считываются значения синусоидального сигнала. Назначение: Получение данных из рабочего пространства MATLAB. Параметры: Data – Имя переменной (матрицы или структуры) содержащей данные. Sample time - Шаг изменения выходного сигнала блока. Interpolate data — Интерполяция данных для значений модельного времени не совпадающих со значениями в переменной Data. Form output after final data value by – Вид выходного сигнала по окончании значений времени в переменной Data: - Extrapolate – Линейная экстраполяция сигналов. - SettingToZero – Нулевые значения сигналов. - HoldingFinalValue – Выходные значения сигналов равны последним значениям. - CyclicRepetition – Циклическое повторение значений сигналов. Данный вариант может использоваться, только если переменная Data имеет формат Structure without time. Д 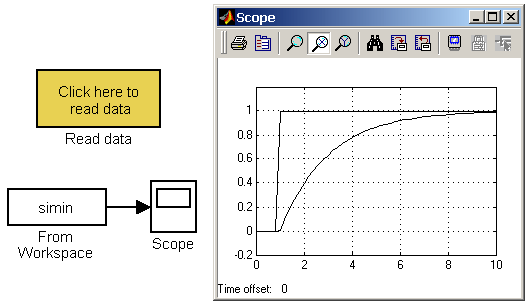 анные в переменную simin рабочей области MATLAB загружаются из файла с помощью блока Read data. анные в переменную simin рабочей области MATLAB загружаются из файла с помощью блока Read data. Назначение: Формирование сигнала нулевого уровня. Параметры: Нет. Если какой-либо вход блока в модели не подсоединен, то при выполнении моделирования в главном окне MATLAB появляется предупреждающее сообщение. Для устранения этого на неподключенный вход блока можно подать сигнал с блока Ground. Н 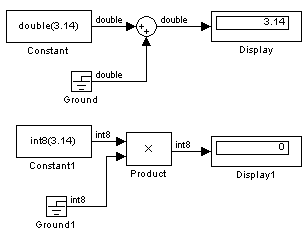 а нижнем рисунке даны примеры использования блока. В первом случае сигнал с блока Ground поступает на один из входов сумматора, а во втором на один из входов блока умножения. Показания блоков Display подтверждают, что вырабатываемый блоком Ground сигнал имеет нулевое значение. Из рисунка также видно, что тип выходного сигнала блока устанавливается автоматически, в соответствии с типами сигналов, подаваемых на другие входы блоков (в данном случае – на входы блоков Sum и Product). а нижнем рисунке даны примеры использования блока. В первом случае сигнал с блока Ground поступает на один из входов сумматора, а во втором на один из входов блока умножения. Показания блоков Display подтверждают, что вырабатываемый блоком Ground сигнал имеет нулевое значение. Из рисунка также видно, что тип выходного сигнала блока устанавливается автоматически, в соответствии с типами сигналов, подаваемых на другие входы блоков (в данном случае – на входы блоков Sum и Product).Назначение: Формирование периодического сигнала. Параметры: Time values – Вектор значений модельного времени. Output values – Вектор значений сигнала для моментов времени заданных вектором Time values. Б 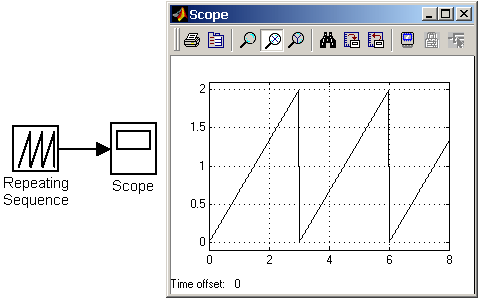 лок выполняет линейную интерполяцию выходного сигнала для моментов времени не совпадающих со значениями заданными вектором Time values. Значения модельного времени заданы вектором [0 3], а значения выходного сигнала вектором [0 2]. лок выполняет линейную интерполяцию выходного сигнала для моментов времени не совпадающих со значениями заданными вектором Time values. Значения модельного времени заданы вектором [0 3], а значения выходного сигнала вектором [0 2].1.17. Блок входного порта Inport Назначение: Создает входной порт для подсистемы или модели верхнего уровня иерархии. Параметры: Port number – Номер порта. Port dimensions – Размерность входного сигнала. Если этот параметр равен –1, то размерность входного сигнала будет определяться автоматически. Sample time –Шаг модельного времени. Data type – Тип данных входного сигнала: auto, double, single, int8, uint8, int16, uint16, int32, uint32 или boolean. Signal type – Тип входного сигнала: auto – Автоматическое определение типа. real –Действительный сигнал. complex- Комплексный сигнал. Interpolate data (флажок) – Интерполировать входной сигнал. В случае, если временные отсчеты входного сигнала считываемого из рабочей области MATLAB не совпадают с модельным временем, то блок будет выполнять интерполяцию входного сигнала. При использовании блока Inport в подсистеме данный параметр не доступен. |