Гос экзамен по специальности Приборостроение. Ответы на вопросы ГОС экзамена. Тактильные датчики применяют для обнаружения объекта, установления момента
 Скачать 1.42 Mb. Скачать 1.42 Mb.
|

|
Электромагнитные ЛС Принцип работы электромагнитных локационных систем (ЭЛС) основан на взаимодействии магнитного поли преобразователя с металлическими объектами. Эти системы обычно используют для параметрического контролям дефектоскопии, а также для измерении расстояний, вибраций и т. п. В качестве ЧЭ служат дроссели и трагкформаторы различной формы. В зависимости от частоты магнитного поля ЭЛС разделяют на три группы: 1) магнитные - возбуждение постоянным или низкочастотным магнитным нолем; 2) вихретоковые - возбуждение переменным магнитным полем частотой от 2 *102 до 5*106 Гц; 3) радиоволновые - возбуждение высокочастотным магнивным нолем частотой от 3 * 1010 до 3*1012 Гц. Магнитные локационные системы Магнитные ЛС являются основными средствами неразрушающего контроля в литейном и прокатном производствах. Их используют для задач дефектоскопии - выявления нарушений сплошности предметов из ферромагнитных материалов, обнаружении мелких (3...10 мкм) трещин на их по-верхности, определения толщины немагнитных покрытий на магнитной основе и толщины стенок изделий из магнитных и немагнитных материалов. Принцип магнитной дефектоскопии 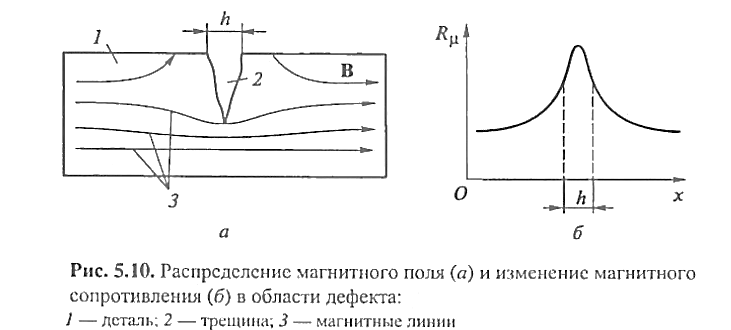 Рис. 5.10. Распределение магнитного поля (а) и изменение магнитного сопротивлении (б) в области дефекта: 1 - деталь; 2 - трещина; 3- магнитные линии В робототехнике магнитные ЛС с индуктивными датчиками широко используют для определения расстояния до металлического объекта. К достоинствам маг нигных ЛС можно отнести простоту конструкций, большую глубину зоны контроля, высокую надежность (на показания датчика практически не влияют климатические факторы и загрязнегтие поверхности ), к недостаткам - низкую разрешающую способность и нелинейность функции преобразования. Работа вихретоковой ЛС основана на взаимодействии внешнего магнитного поля с электромагнитным полем вихревых (замкнутых) токов, наводимых возбуждающей катушкой в любом электропроводящем объекте. Вихретоковый метод (электромагнитный метод) основан на регистрации и анализе взаимодействия электромагнитного поля вихретокового преобразователя с электромагнитным полем вихревых токов, наводимых в контролируемом объекте. Этим методом контролируют изделия из электропроводящих материалов. В дефектоскопии с помощью вихревых токов удается обнаружить трещины наружного и внутреннего зanегания длиной 1...2 мм и глубиной 0,1 ...0,3 мм, раковины с глубиной залегания до б мм, неметаллические включения. Вихретоковые ЛС позволяют измерять толщину покрытий в диапазоне 0,001 ... 1,0 мм. Для увеличения глубины проникновения вихревых токов применяют специальные меры. Например, создавая в материале магнитное насыщение (уменьшая его магнитную проницаемость), увеличивают глубину проникновения вихревых токов до 10 мм. Особенностью вихретоковых ЛС является их мпогопараметричность, так как ЭДС преобразователя зависит ат разных характеристик объекта контроля и окружающей среды, неявно влияющих на выходной сигнал. Это обстоятельство определяет как достоинства, так и недостатки таких систем. Существенным недостатком всех многокомпонектных вихретоковых датчиков является высокий коэффициент влияния информационных каналов (12...20 %). Первичные преобразователи (сенсоры) для измерения различных физических величин: резистивные, емкостные, индуктивные, пьезо- и тензоэлектрические преобразователи, оптические преобразователи Первичным преобразователем или чувствительным элементом (ЧЭ) называется простейший элемент информационной системы, изменяющий свое состояние под действием внешнего возмущения (например, фототранзистор, фотодиод или тензорезистор). Однако большинство неэлектрических величин измеряют электрическими методами путем преобразования неэлектрической величины в электрический сигнал, поскольку обработка, передача и отображение сигналов в электрической области сравнительно просты. Восприятие физической величины и преобразование ее в электрический сигнал в измерительных системах осуществляется первичными измерительными преобразователями (ПИП) или измерительными датчиками. Датчики содержат чувствительный элемент, преобразующий измеряемую физическую величину в другую величину, пригодную для дальнейшей обработки и преобразования. Ограничим наше рассмотрение датчиками, которые отображают величины из различных физических областей в сигналы в электрической области. В генераторных преобразователях выходной сигнал в виде ЭДС, заряда или тока возникает в результате физических эффектов, функционально связанных с измеряемой неэлектрической величиной. Применение этих преобразователей не требует внешних источников питания. К генераторным преобразователям относят пьезоэлектрические датчики, индукционные преобразователи, термоэлектрические преобразователи (термопары) и др. В параметрических преобразователях собственно выходной величиной при воздействии входной является изменение параметров датчика: его сопротивления, емкости, индуктивности. Поэтому при их использовании необходим дополнительный источник питания, позволяющий трансформировать изменение параметров датчика в изменение тока, напряжения или заряда. Для работы с такими датчиками используют измерительные цепи, питаемые как постоянным, так и переменным током. К параметрическим преобразователям относят: индуктивные преобразователи, емкостные преобразователи, тензорезисторы, терморезисторы и т. д. Резистивные измерительные преобразователи относятся к классу параметрических датчиков, включаемых в электрическую цепь с источником питания. Общим свойством является зависимость сопротивления датчика от измеряемой величины. Реостатный преобразователь – прецизионный реостат, движок которого перемещается под действием измеряемой величины. Входной величиной датчика является линейное или угловое перемещение движка, выходной – изменение его сопротивления. Обмотка реостата изготавливается из провода с высоким удельным сопротивлением: константана, манганина, нихрома. Достоинство датчика заключается в его простоте, а недостаток – в механическом износе и химической коррозии, которые способны изменить рабочую характеристику датчика. Легко показать, что реостатный преобразователь перемещений имеет линейную функцию преобразования только при условии , в противном случае появляется нелинейность. ( ) пит н U u f x x l нагр реост R R Системы технического зрения. Видеодатчики. Восприятие изображения, предварительная обработка, распознавание. Назначение СТЗ, принцип их действия, области применения типовая структура. СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ В робототехнике как и в живом мире основным видом очувствления является зрение. Первые системы технического (машинного, компьютерного) зрения, нашедшие применение в средствах робототехники, копировали органы зрения живых организмов, развиваясь в такой последовательности: черно-белые монокулярные СТЗ, цветные, стереоскопические и многоракурсные с различными вариантами аппаратной реализации. Первое устойчивое применение в робототехнике СТЗ получили в системах управления манипуляторов и мобильных роботов от человека-оператора. Так, в 70–80-е годы прошлого столетия в ЦНИИ РТК были созданы такие системы управления для подводных роботов различного назначения. Под техническим зрением в робототехнике понимают процесс восприятия роботом окружающих объектов с помощью датчиков оптической информации, оценки местоположения объектов и их распознавания на основе полученной видеоинформации. Системы технического зрения (СТЗ) состоят из датчиков оптической информации (ДОИ) и средств обработки и анализа изображения и других устройств. Средства обработки и анализа изображения реализуются на микроЭВМ или микропроцессорах. Разработке СТЗ придается большое значение во всех развитых странах мира. Бурно растет рынок СТЗ. Система технического зрения в общем случае должна обеспечивать: восприятие (регистрацию) первичной информации – исходного изображения; формирование модели ситуации на основе первичной зрительной информации для последующей обработки (аналоговая картинная модель, цифровая модель и т.п.); поиск объектов; классификацию объектов; определение местонахождения объектов в рабочей зоне; определение ориентации объектов в пространстве или на плоскости; измерение характерных параметров объекта или совокупности объектов (числа объектов, геометрических размеров, площади, цвета и т.п.). 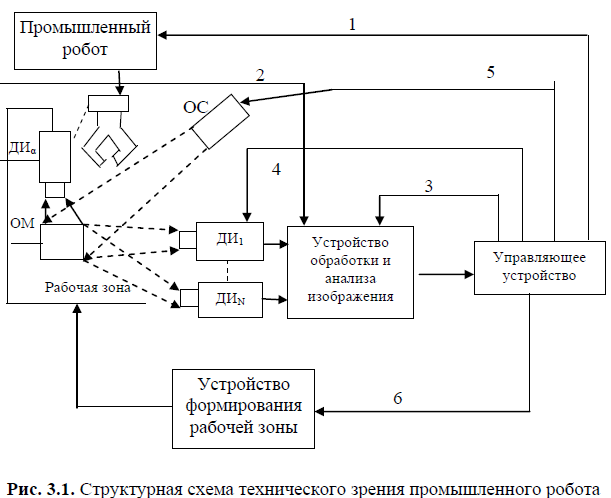 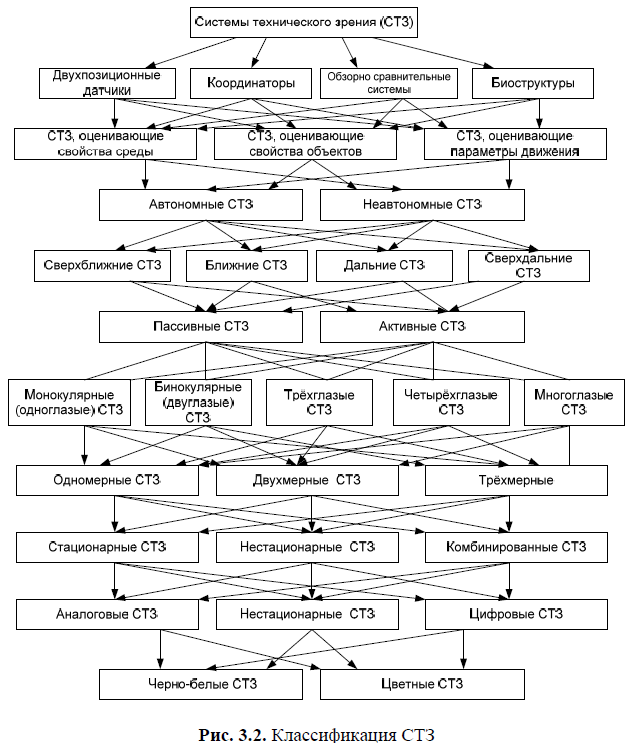 СТЗ могут быть — одномерными (линейка), двух- и трехмерными; — монохромными (полутоновыми, черно-белыми); — цветными. На рисунке внизу показан типовой состав СТЗ: датчик (сенсор) изображения, устройство предобработки (последнее может быть объединено с датчиком в цифровой датчик) и процессор, выходная информация от которого поступает в систему управления и к человеку-оператору для дальнейшего использования.  Основной тип СТЗ — это однопроцессорные системы, например, на базе персонального компьютера. Предобработка осуществляется специальным устройством ввода (цифровая плата с памятью изображения). Для повышения быстродействия особенно при работе с достаточно сложными изображениями переходят к многопроцессорным системам с разделением задач на подзадачи, которые можно решать параллельно. Существуют СТЗ и с последовательной (конвейерной) структурой. Они применяются для обработки больших массивов данных за длительный период времени. В компьютерах используется цифровое изображение, которое представляет собой полученную от датчиков изображения совокупность строк и столбцов пикселов (pixels — сокращение слов picture element — элемент изображения), предварительно преобразованных в цифровую форму. Каждый пиксел характеризуется интенсивностью (яркостью), которая представляется числом. Обычно используют однобайтовые (8-битовые) числа, дающие числовые значения от 0 до 255, реже — 10 битовые (1024 значения). Изобразите блок-схему последовательного, дифференциального и компенсационного датчика положения и перемещения и поясните работу их элементов Датчиком положения и перемещения (ДПП) называется устройство, воспринимающее контролируемое положение и/или перемещение объекта (линейное или угловое) и преобразующее его в выходной (обычно, электрический) сигнал, удобный для дальнейшей обработки, хранения или передачи по каналу связи. Существует два основных метода определения положения и измерения перемещений. В соответствии с первым, датчик вырабатывает сигнал, являющийся функцией положения одной из его частей, связанных с подвижным объектом, а изменение этого сигнала характеризует перемещение этого объекта. В соответствии со вторым методом датчик формирует импульс на каждое элементарное перемещение, и суммарное положение определяется суммой всех элементарных перемещений. Информативным параметром датчиков первой группы, получивших название абсолютных, является изменение электрического импеданса - сопротивления, индуктивности или емкости в функции положения подвижного элемента датчика. Преобразователи второй группы называются датчиками последовательных приращений или относительными.  Изобразите структурно-функциональную схему робота и поясните работу элементов робота 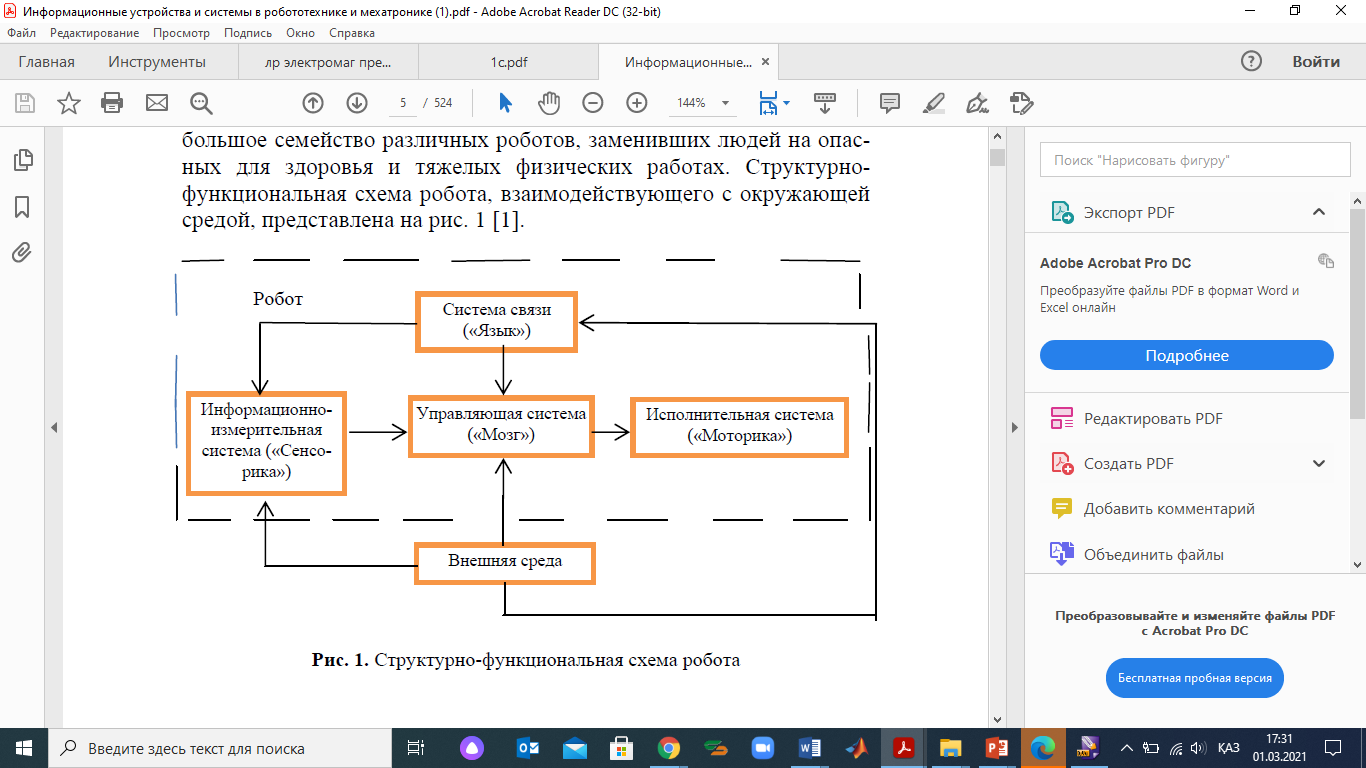 Робот в общем случае состоит из 4 систем: информационно-измерительной («Сенсорика»), управляющей («Мозг»), исполнительной («Моторика») и системы связи с другими роботами, человеком или внутренними системами робота («Язык»). Информационно-измерительная система («Сенсорика») – это искусственные органы чувств робота, которые предназначены для восприятия и преобразования информации о состоянии внешней среды и самого робота в соответствии с потребителями управляющей системы («мозга») робота. Управляющая система («Мозг») робота предназначена, во-первых, для выработки закона управления приводами (двигателями) механизмов исполнительной системы, используя сигналы обратной связи от информационно-измерительной системы; во-вторых, для общения робота с человеком на каком-либо языке. Интеллектуальные способности робота определяются управляющей и информационно-измерительной системой [1]. Исполнительная система («Моторика») робота служит для выполнения управляющих сигналов (программы), формируемых управляющей системой, а также воздействия на окружающую среду. Примеры исполнительных систем: манипуляторы (механические руки), педипуляторы (механические ноги), самоходные тележки, 3D-томографы и др. Система связи робота предназначена для организации обмена информацией между системами робота, между роботом и человеком или другими роботами на понятном им языке. Цель такого обмена – формулировка человеком заданий роботу, организация диалога между человеком и роботом, контроль за функционированием робота, диагностика неисправностей и регламентная проверка робота. Информация от человека к роботу обычно поступает через пульт управления или через устройство ввода (набор команд с клавиатуры, речевое общение, ввод видеоинформации, ввод информации с помощью биопотенциалов и др.) [1, 2]. Таким образом, человек может передавать информацию роботу как путем непосредственного ее занесения в память управляющей системы, так и путем воздействия через искусственные органы чувств. Изобразите классификацию сенсорных устройств 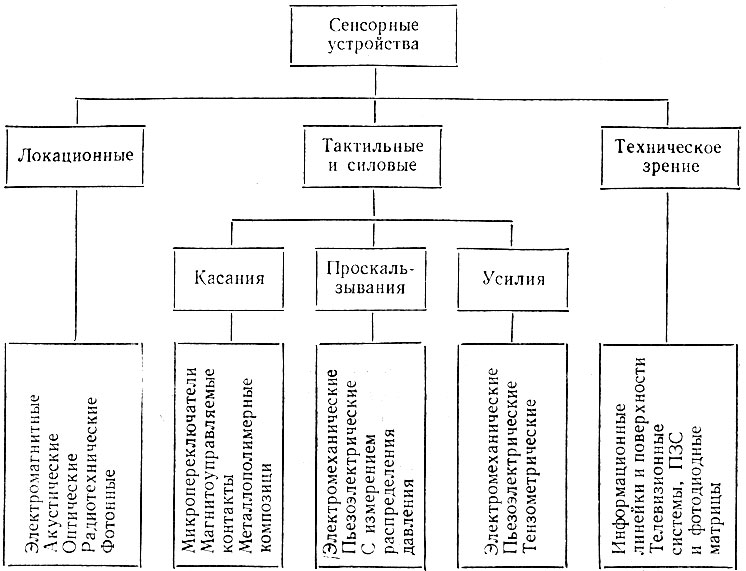 Изобразите классификацию акселерометров Перемещение объекта, его скорость и ускорение являются взаимосвязанными величинами - ускорение является второй производной перемещения. Однако производная сильно зашумленного сигнала содержит очень большие погрешности. Поэтому, производную от перемещения целесообразно вычислять только в низкочастотной области измерений (не выше 1 Гц), в среднечастотной области (до 1 кГц) используют датчики скорости, а в высокочастотной, когда перемещения соизмеримы с шумом, используют датчики ускорения — акселерометры.  5. Изобразите структурно-схему организации взаимосвязи информационной системы с распределенной системой управления 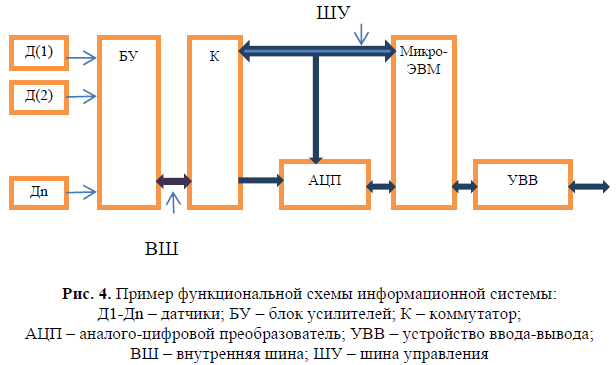 Работа с графикой средствами MATLAB. Для чего служат команды: plot, meshgrid, title, label, text, legend, axis, grid, hold on, hold off, subplot. x Label, Y Label, Z Label - подписи осей осей; - Title - надпись названия диаграммы; - Legend - легенда, т.е. обозначение линий графиков; - Colorbar - вывод цветовой палитры; -Arrow - рисование стрелки; - Line - рисование линии; - Text - позволяет поместить текст в области построения диаграммы; - Axes - позволяет построить оси. Команды Matlab для оформления графиков - команда gridon наносит сетку на график; - функция title(‘заголовок’) выводит заголовок графика; - функции xlabel(‘подпись оси х’), ylabel(‘подпись оси у’) служат для подписи осей х и у соответственно; - функция legend(‘легенда1’, ‘легенда2’, … , ‘легендаn’, k) выводит легенды для каждого из n графиков, параметр k определяет месторасположение легенды в графическом окне: -1 – в правом верхнем углу графического окна, за пределами графика; 0 – автоматически выбрать наилучшее месторасположение; 1 – в правом верхнем углу графика (значение по умолчанию); 2, 3, 4 – в левом верхнем, в левом нижнем, в правом нижнем углах графика соответственно. Таким образом, с помощью строковой константы S можно изменять цвет линии, представлять узловые точки различными отметками (точка, окружность, крест, треугольник с разной ориентацией вершины и т. д.) и менять тип линии графика. Команда р lot(X 1, Y 1, S 1, Х2, Y 2, S 2, ХЗ, Y3, S3,...) строит на одном графике ряд линий, представленных данными вида (X, Y, S), где X и Y — векторы или матрицы, a S — строки. С помощью такой конструкции возможно построение, например, графика функции линией, цвет которой отличается от цвета узловых точек. При отсутствии указания на цвет линий и точек он выбирается автоматически из таблицы цветов (белый исключается). Если линий больше шести, то выбор цветов повторяется. Иногда требуется сравнить поведение двух функций, значения которых сильно отличаются друг от друга. График функции с небольшими значениями практически сливается с осью абсцисс, и установить его вид не удается. В этой ситуации помогает функция plotyy, которая выводит графики в окно с двумя вертикальными осями, имеющими подходящий масштаб. Трехмерные поверхности обычно описываются функцией двух переменных z(x, у). Специфика построения трехмерных графиков требует не просто задания ряда значений х и у, то есть векторов х и у. Она требует определения для X и Y двумерных массивов — матриц. Для создания таких массивов служит функция meshgrid. В основном она используется совместно с функциями построения графиков трехмерных поверхностей. Функция meshgrid записывается в следующих формах: – [X,Y,Z] = meshgrid(x, y, z) — возвращает трехмерные массивы, используемые для вычисления функций трех переменных и построения трехмерных графиков; – [X,Y] = meshgrid(x, y) — преобразует область, заданную векторами х и у, в массивы X и Y, которые могут быть использованы для вычисления функции двух переменных и построения трехмерных графиков. Строки выходного массива X являются копиями вектора х, а столбцы Y — копиями вектора у. Команда plot3(...) является аналогом команды plot(...), но относится к функции двух переменных z(x, у). Она строит аксонометрическое изображение трехмерных поверхностей и представлена следующими формами: – plot3(x, y, z) — строит массив точек, представленных векторами х, у и z, соединяя их отрезками прямых. Эта команда имеет ограниченное применение; – plot3(X, Y, Z, S) — обеспечивает построения со спецификацией стиля линий и точек; – plot3(x1, y1, z1, s1, х2, у2, z2, s2,...)— строит на одном рисунке графики нескольких функций z1(x1,y1), z2(x2,y2) и т. д. со спецификацией линий и маркеров каждой из них. Наиболее представительными и наглядными являются сетчатые графики поверхностей с заданной или функциональной окраской. В названии их команд присутствует слово mesh. Имеются три группы таких команд: – mesh(X, Y, Z, C) — выводит в графическое окно сетчатую поверхность Z(X,Y) с цветами узлов поверхности, заданными массивом С; – mesh(X, Y, Z) — аналог предшествующей команды при C=Z. В данном случае используется функциональная окраска, при которой цвет задается высотой поверхности. Функция mesh возвращает дескриптор для объекта класса surface. Ниже приводится пример применения команды mesh: >> [X, Y]=meshgrid([-3:0.15:3]); >> Z=X.^2+Y.^2; >> mesh(X, Y, Z) – График поверхности, созданный командой mesh(X,Y,Z) После того как график уже построен, MATLAB позволяет выполнить его форматирование или оформление в нужном виде. Так, для установки над графиком титульной надписи используется следующая команда title( 'string') — установка на двумерных и трехмерных графиках титульной надписи, заданной строковой константой 'string'. Для установки надписей возле осей х, у и z используются следующие команды: xlabel('String'), ylabe l('String'), zlabel('String'). Рисунок 4.2 – Установка надписей с использованием команды: xlabel('String'), ylabel('String'), zlabel('String') Часто возникает необходимость добавления текста в определенное место графика, например для обозначения той или иной кривой графика. Для этого используется команда text: – text(X,Y, 'string') — добавляет в двумерный график текст, заданный строковой константой 'string', так что начало текста расположено в точке с координатами (X, Y). Если X и Y заданы как одномерные массивы, то надпись помещается во все позиции [x(i), y(i)]; – text(X,Y, Z, 'string') — добавляет в трехмерный график текст, заданный строковой константой 'string', так что начало текста расположено в позиции, заданной координатами X, Y и Z. Очень удобный способ ввода текста предоставляет команда gtext: – gtext('string') — задает выводимый на график текст в виде строковой константы 'string' и выводит на график перемещаемый мышью маркер в виде крестика. Установив маркер в нужное место, достаточно щелкнуть любой кнопкой мыши для вывода текста. Пояснение в виде отрезков линий со справочными надписями, размещаемое внутри графика или около него, называется легендой. Для создания легенды используются различные варианты команды legend: |