Учебнометодический комплекс для заочного обучения с применением дистанционных технологий для студентов специальности 190702 Организация и безопасность дорожного движения
 Скачать 5.75 Mb. Скачать 5.75 Mb.
|

Вопросы для самопроверкиИстория создания. GPS и Глонасс. Назначения и принципы работы. GPS и Глонасс. Источники ошибок и основные сегменты. Глонасс. Методы расчета координат. 9.Интеллектуальные АТС9.1. Структура интеллектуального АТСВ RTI и IVHS – технологиях (RTI – Road and Traffic Information, IVHS – Intelligent Vehicle and Highway System), которые являются примерами современных АСУД, в качестве управляемой подсистемы выступает интеллектуальное АТС. Такие АТС обеспечивают высокий уровень автоматизации управления как отдельным автомобилем, так и транспортным потоком. Создание нового интеллектуального АТС и внедрение его в единую систему автоматического управления движением вызывает усложнение всех систем транспортного средства, а возрастающая интенсивность движения требует от него высокой надёжности. Кроме того, значительно увеличивается объем информации, предоставляемой водителю о режимах работы и техническом состоянии автомобиля в целом. Поэтому для обеспечения безопасности дорожного движения следует повысить уровень оперативного информирования водителя о скорости движения, техническом состоянии систем, агрегатов и режимов их работы. С другой стороны, современное АТС имеет высокий уровень автоматизации управления узлами и агрегатами. Это и оптимальные регуляторы режимов работы двигателя, автоматические системы управления силовой передачей, системы экстренного торможения и т.д. За счет этого водитель высвобождается от постоянного слежения за режимами работы двигателя, контроля управляемости автомобиля. Полученный информационный резерв следует переключить на навигацию автомобиля, его взаимодействие с АСУД. Основным звеном интеллектуального АТС является бортовой измерительно-вычислительный комплекс (БИВК), в состав которого входят бортовая система контроля узлов и агрегатов АТС, система встроенной диагностики, маршрутный контроллер и навигационная система (НС), основной функцией которой является определение пространственно-временного положения АТС. Множество НС представляет собой управляемую подсистему АСУД, которой свойственно рациональное сочетание централизации и автономности. Под автономностью здесь следует понимать возможность измерения параметров при помощи бортовых средств. Например, по отношению к управляющему центру АСУД, НС АТС выступает в качестве автономной системы. На основании этого рассмотрим, как должна быть организована структура современной АСУД. Современную АСУД можно представить как многослойную систему. В предлагается пять функциональных слоев АСУД. При рассмотрении сверху вниз слои названы сеть, связь, координация, регулирование и физический, причем три последних слоя включает в себя бортовая система управления АТС. К настоящему времени успешно внедрены и проверены модели и соответствующие системы управления для каждого из указанных выше слоев АСУД, за исключением сетевого уровня, который находится в стадии разработки. Физический слой включает все бортовые системы АТС: двигатель, тормозную систему, различные датчики и т.д. Главная функция этого слоя поддерживать поступательное движение АТС на заданном маршруте. 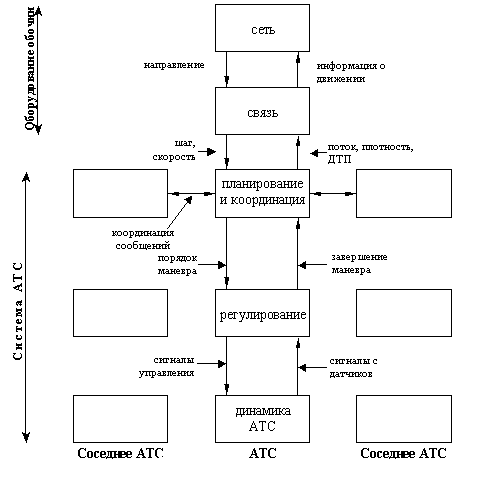 Рисунок 9.1 Схема АТС Слой регулирования автомобиля отвечает за управление направлением движения АТС и выполнением маневров, которые управляются слоем координации. На этом логическом уровне АСУД, АТС рассматривается как материальная точка. Здесь под управлением направлением движения понимают поддержание желательной скорости и сохранение безопасной дистанции с соседними АТС, а также желательный курсовой угол движения. Этот слой также отвечает за выполнение маневров входа или выхода из потока, контролируемого АСУД. Слой координации отвечает за выбор действия, которое необходимо выполнить транспортному средству в следующий момент. Слои координации соседних АТС поддерживают связь между собой, а так же проверяют команды слоя регулирования, чтобы выполнить их или начать действовать по плану аварийного прекращения работы. Этот слой также связывается со слоем связи системы управления обочины, из которой периодически получает модифицируемый план действий. Слой координации хранит и обновляет всю информацию о состоянии соседних АТС в потоке. Эта информация включает тип автомобилей, их текущее положение, текущие действия и план дальнейших действий. План периодически модифицируется регулятором слоя связи. Используя информацию и координируя действия с соседними АТС, регулятор слоя координации выбирает одно действие из конечного множества возможных. Для каждого достаточно протяженного участка дороги имеется один регулятор слоя связи. Задача его состоит в управлении потоком движения на данном участке дороги, достижении максимальной вместимости потока и минимального времени передвижения в назначенный пункт. На этом логическом уровне, АСУД больше не контролирует действия каждого транспортного средства в отдельности. Вместо этого слой связи измеряет и описывает плотность потока как функцию от пространства и времени. В самом простом случае, если все АТС в потоке выполняют действие а, то пространственно-временное положение для этого действия (a) = s(а)t, (9.1) где s в метрах, а t в секундах. Тогда максимальная плотность потока k(a) = 1/s(a). (9.2) В реальных условиях s, t и выбор действия а ‑ все переменные. Задача регулятора сетевого уровня управление движением по маршруту внутри сети дорог, входящих в АСУД, с целью оптимизации плотности потока и минимизации времени движения. Этот слой архитектуры АСУД разработан менее всего. Каждый из указанных слоев АСУД в свою очередь имеет сложную структуру. Все они работают в своем пространстве и времени. В связи с чрезвычайной сложностью связей как внутри, так и между слоями АСУД, их полное математическое описание в обычном функциональном виде невозможно. |