УМП к лабораторным и СРО КИР. Учебнометодическое пособие по выполнению лабораторных работ и самостоятельной работе обучающихся Стерлитамак 2018
 Скачать 2.62 Mb. Скачать 2.62 Mb.
|

|
Лабораторная работа № 5 Динамическая балансировка роторов ЦЕЛЬ РАБОТЫ 1 Ознакомление студентов с теорией балансировки вращающихся элементов машин и аппаратов. 2 Привитие студентам практических навыков по динамической балансировке роторов. 5.1 ТЕОРЕТИЧЕСКАЯ ЧАСТЬ Многие современные машины химической промышленности, такие как турбокомпрессоры, центрифуги, насосы, имеют быстровращающиеся части. При недостаточной отбалансированности таких агрегатов в них возникают вибрации, которые создают дополнительные нагрузки на подшипники, расшатывают опоры и соединения узлов и деталей. Неуравновешенность вращающихся частей может возникнуть вследствие неточности изготовления деталей, деформации их при работе, относительного смещения деталей при сборке и вовремя эксплуатации, а также из-за неравномерности распределения материала в теле детали (разностенности, наличия раковин и неметаллических включений). Так как центробежные силы инерции пропорциональны квадрату угловой скорости, то с увеличением скоростей машин задача об уравновешивании вращающихся звеньев приобретает всё большее значение. 5.1.1 Условие уравновешенности вращающегося тела Жесткое тело, имеющее определенную длину по оси его вращения, обычно называют ротором. Элементарная сила инерции ротора Рк, возникающая от элементарной массы mk расположенной на расстоянии ηк от оси вращения (рисунок 12) равна: 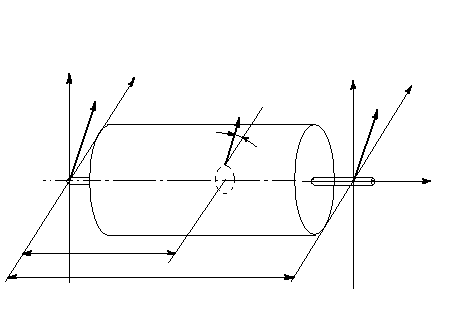 У Х Z Рк' Рк I II Pk'' I II zk a Рисунок 12 – Схема динамических давлений в опорах Координаты элементарной массы Откуда Проекция составляющих Р'k и Р''к на оси координат: Суммируя элементарные силы, действующие в плоскостях I и II получаем где xs; ys - координаты центра тяжести; /xz; /yz - центробежные моменты инерции ротора; M - масса ротора. Силы PIи и PIIи , действующие в плоскостях I и II равны Эти силы не равны и не параллельны, но расположены в двух параллельных плоскостях: перекрещиваются. Систему двух перекрещивающихся сил называют крестом сил. Таким образом, центробежные силы инерции любого вращающегося тела (ротора) можно заменить двумя силами, действующими в двух произвольно выбранных параллельных плоскостях, перпендикулярных оси вращения ротора, - крестом сил. Это положение является основным в теории, практике уравновешивания (балансировки) роторов. Если в плоскостях I и II расположить подшипники, то силы PIк и PIIк будут динамическими давлениями в опорах ротора. В уравновешенной системе центробежные PIи и PIIи равны 0. Так как Условие (5.13) требует чтобы центр тяжести ротора находился на оси вращения, а условие (5.14) - чтобы ось вращения ротора совпадала с главной осью вращения. Если центр тяжести ротора не лежит на оси вращения, т.е. Уравновешивание этой силы может быть выполнено при неподвижном роторе, т.е. произведена статическая балансировка. Если, например, ось отверстия будет наклонена к оси вращения ротора (рисунок 13), то при расположении центра тяжести ротора на оси вращения все равно возникают динамические давления на опоры. В этом случае равные и обратно направленные силы инерции Ри создают пару с моментом Ми=Риz. Пара стремится повернуть ось ротора и создаёт в подшипниках давление 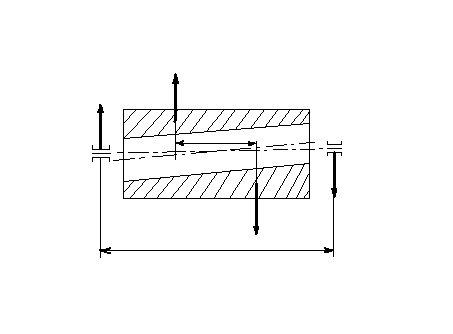 Ри Ри РI РII z L Рисунок 13 5.1.2 Динамическая балансировка При динамической балансировке подбирают пару таких грузов, чтобы образуемый при их вращении момент уравновешивал момент, возникающий вследствие несбалансированности ротора, Для динамической балансировки применяют специальные балансировочные станки, которые позволяют выполнять балансировку роторов массой до нескольких тысяч килограмм. На рисунке 14 представлена схема балансировочного станка типа ТММ-1К, предназначенного для балансировки ротора в лабораторных условиях. 5.2 УСТРОЙСТВО И ПРИНЦИП РАБОТЫ СТАНКА Маятниковая рама (5) подвешена на стойках (9) и благодаря шарикоподшипниковым опорам (10) может колебаться относительно оси вращения. Момент, восстанавливающий маятниковую раму, создается консольной стержневой пружиной (7). Специальный ротор (1) установлен на шарикоподшипниковых опорах (3) маятниковой рамы (5). В роторе с помощью болта создан постоянный дисбаланс. На полуосях ротора с каждой стороны насажены два динамически отбалансированных диска (2). При балансировке ротора в прорезях правого диска на определенном радиусе устанавливается дополнительный груз (4). 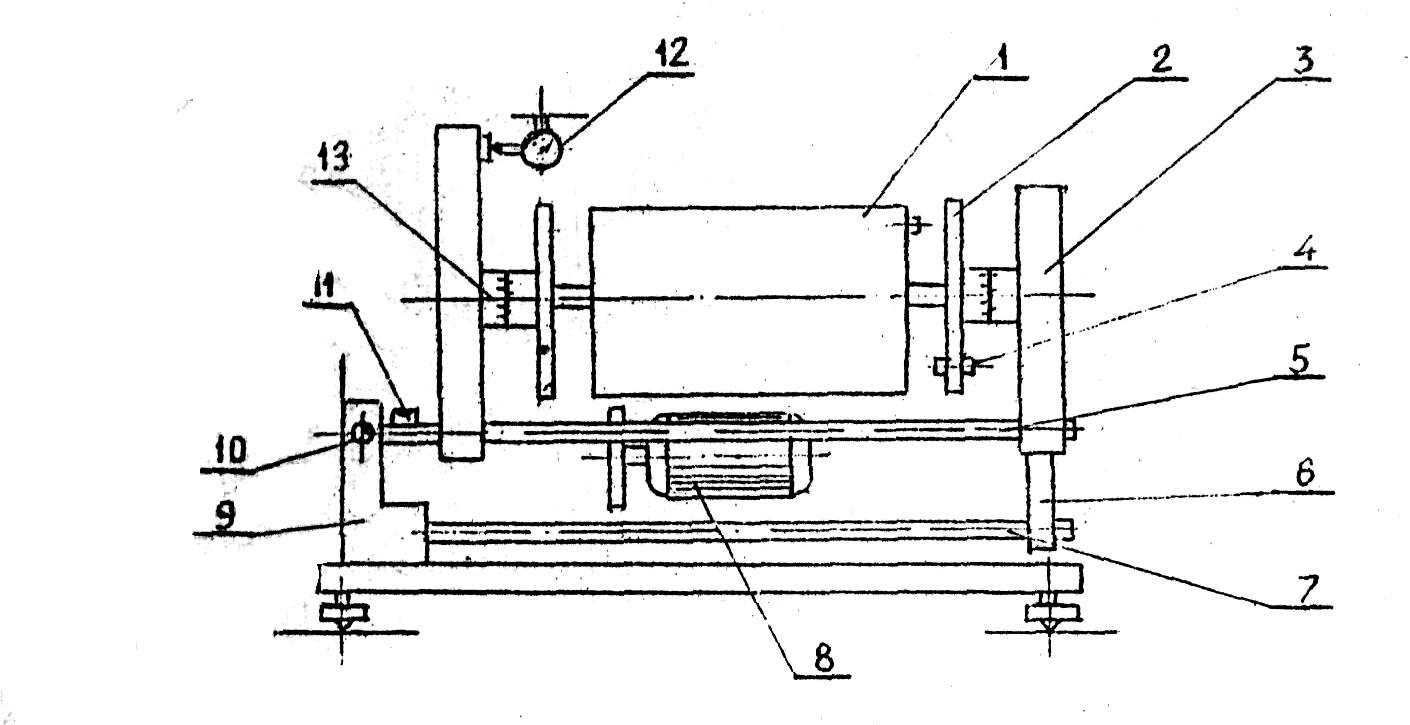 1 - ротор, 2 - диски, 3 - шарикоподшипниковые опоры, 4 - груз, 5 - маятниковая рама, 6 - серьга, 7 - восстанавливающая пружина, 8 - электродвигатель, 9 - рама, 10 - шарнир, 11 - уровень, 12 - индикатор, 13 - лимб. Рисунок 14 Углы установки дисков отсчитываются по лимбу (13). Разгон ротора осуществляется посредством фрикциона, насаженного на вал электродвигателя (8), закрепленного на плече качающегося рычага. Другое плечо рычага заканчивается рукояткой, при помощи которой осуществляется прижим фрикциона к ротору. Восстанавливающая пружина (7) одним концом шарнирно серьгой (8) соединена с рамой. Другой конец пружины неподвижно закреплен на станине. Измерение амплитуд колебаний производится с помощью индикатора (12) часового типа. Горизонтальность маятниковой рамы контролируется по уровню (11) и регулируется с помощью опорных винтов станины. Питание станка осуществляется от сети переменного тока, напряжением 220 В. Техническая характеристика балансировочного станка Постоянный дисбаланс ротора, Нм 0,008 Цена деления шкалы индикатора измерения амплитуды колебания ротора, мм 0,01 Цена деления угловой шкалы дисков, град. 2 Цена деления радиальной шкалы дисков, мм 1 Частота вращения ротора, об/мин 1780 Частота вращения приварного электродвигателя, об/мин 2200 Масса грузов, г 10, 20,30 5.3 ПОДГОТОВКА СТАНКА К РАБОТЕ Перед началом работы необходимо проверить крепление опор ротора. Привести маятниковую раму в горизонтальное положение с помощью опорных винтов станины и сферического уровня на раме. Проверить, законтрены ли все опорные, винты станины. Установить индексы балансировочных дисков на нуль лимбов, диски закрепить стопорами. Подключить станок к сети 220 В. Проверить удерживание штока индикатора тормозным устройством при минимальной силе торможения. Привести шток индикатора в соприкосновение с контактным винтом рамы в плоскости диска и установить стрелку индикатора на нуль. Нажатием рукоятки привода ротора привести ротор во вращение. Разгон ротора прекратить после перехода через резонанс. После остановки ротора и прекращения колебаний рамы убедиться, что стрелки индикатора устанавливаются на нуль. 5.4 ПОРЯДОК РАБОТЫ При балансировке ротора вначале определяется амплитуда А1 при резонансе от собственной неуравновешенности ротора. Амплитуда определяется как среднее значение от трёх замеров. При измерении амплитуды необходимо следить за индикатором: в момент пуска при сильном нажиме на рукоятку маятниковая рама может получить большое отклонение, превышающая максимальную амплитуду колебаний. Поэтому после пуска двигателя нужно осторожным нажатием довести шток индикатора до контакта с кронштейном рамы. Устанавливают добавочный груз Qд на радиусе rд установки в соответствии с заданием в одной из прорезей диска (2). Определяют амплитуду А2 при резонансе как среднее из трех измерений. Освободив стопорные винты поворачивают диск (2) на валу ротора до положения, соответствующего отсчету на лимбе 1800. Диск закрепляют винтами. Измеряют амплитуду А3 при резонансе и принимают среднее из трёх значений. Определяют массу противовеса Qп, радиус его установки rп, значение угла Таблица 1 – Определение максимальных амплитуд колебаний при резонансе
Таблица 2 – Определение веса уравновешивающего груза (противовеса) Qп и радиуса его установки rп.
*Величиной Qп задаёмся. Таблица 3 – Вычисление угла установки противовеса
Рассчитанный противовес Qп устанавливается в плоскости 1 (на левом диске). Добавочные грузы на правом диске при этом снимаются. Производится контрольная балансировка. Поскольку каждому значению косинуса соответствуют два угла При каждом угле установки противовеса определяется остаточная амплитуда сбалансированного ротора Ак как среднее из трех измерений (таблица 4). Для каждого положения определяют относительную величину остаточной неуравновешенности  (5.16) (5.16)Наименьшее значение величины Таблица 4 – Результаты контрольной балансировки
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||