Усольцев А.А. Векторное управление асинхронными двигателями. Учебное пособие по дисциплинам электромеханического цикла СанктПетербург 2002 Содержание
 Скачать 497 Kb. Скачать 497 Kb.
|

|
2. ВЕКТОРНОЕ УПРАВЛЕНИЕ АСИНХРОННЫМ ДВИГАТЕЛЕМ 2.1 Общий принцип векторного управления АД Как известно, полная управляемость электропривода обеспечивается, если обеспечивается управление электромагнитным моментом двигателя. В случае АД для построения системы управления можно использовать выражения (1.5.5)–(1.5.6) и другие производные от этих выражений. Для этого требуется независимо управлять координатами векторов, входящих в выбранное уравнение электромагнитного момента. Выбор уравнения для построения системы управления играет большую роль, т.к. многие величины, в особенности у короткозамкнутых АД, не могут быть измерены. Кроме того, этот выбор существенно влияет на сложность передаточных функций системы, иногда в несколько раз увеличивая порядок уравнений. Однако при любом выборе структура выражения электромагнитного момента будет аналогичной (1.5.7) и общий принцип моделирования и построения системы управления АД заключается в том, что для этого используется система координат, постоянно ориентированная по направлению какого-либо вектора, определяющего электромагнитный момент. Тогда проекция этого вектора на другую ось координат и соответствующее ей слагаемое в выражении для электромагнитного момента будут равны нулю, и формально оно принимает вид, идентичный выражению для электромагнитного момента двигателя постоянного тока, который пропорционален по величине току якоря и основному магнитному потоку. Выбор вектора, по направлению которого ориентируется координатная система, произволен и определяется только простотой и возможностью реализации модели АД. Например, в случае ориентации по потокосцеплению ротора () момент можно представить как
Очевидно, что первое выражение для управления короткозамкнутым АД не представляет интереса, т.к. включает практически неподдающийся измерению и управлению ток ротора, в то время как второе, позволяет при условии постоянства потокосцепления ротора управлять электромагнитным моментом изменением проекции тока статора на поперечную ось i1q. Таким образом, для построения системы векторного управления АД нужно выбрать вектор, относительно которого будет ориентирована система координат, и соответствующее выражение для электромагнитного момента, а затем определить, входящие в него величины из уравнений (1.5.3) для цепи статора и/или ротора. 2.2. Модель АД, управляемого током статора, в системе координат, ориентированной по потокосцеплению ротора Если в качестве опорного вектора выбрать потокосцепление ротора и ориентировать по нему координатную систему так, чтобы ее вещественная ось совпадала с направлением 2,то угловая частота вращения системы координат (mn)= (dq) будет равна угловой частоте питания статора 1, т.к. векторы потокосцеплений статора и ротора вращаются с одинаковой частотой. Тогда из уравнения (1.5.3) для цепи ротора и с учетом того, что 1 = 2, уравнение ротора имеет вид
В это уравнение в качестве переменной входит неконтролируемый ток ротора. Поэтому из выражения (1.2.8 б) для потокосцепления 2 найдем и заменим его в выражении (2.2.1). Тогда, опуская далее индексы системы координат, получим
Преобразуем уравнение (2.2.2) по Лапласу и введем в него электромагнитную постоянную времени ротора ,
Отсюда найдем проекции вектора тока статора с учетом того, что 2q=0
а также потокосцепление и угловую частоту ротора
Таким образом, с помощью проекции тока статора i1d можно управлять потокосцеплением ротора и передаточная функция этого канала соответствует апериодическому звену с постоянной времени равной постоянной времени ротора; а с помощью проекции i1q можно независимо и безинерционноуправлять частотой ротора 2. Подставляя i1q в выражение (2.1.1), получим
т.е. частота токов ротора при заданном потокосцеплении определяет электромагнитный момент АД. 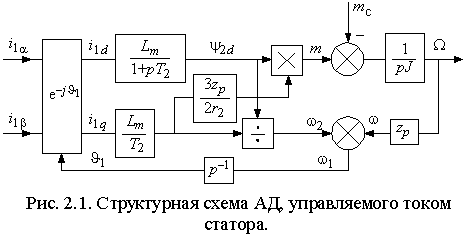 Выражения (2.2.5) и (2.2.6) совместно с уравнением движения электропривода позволяют построить структурную схему АД (рис. 2.1). Входными величинами структурной схемы являются проекции вектора тока статора i1d и i1q в координатной системе ориентированной по потокосцеплению ротора, а также момент сопротивления на валу АД mc. Выходными величинами – угловая частота токов ротора 2 и вращения вала , а также соответствующая им частота статора 1= + 2. Из выражения (2.2.6) следует, что при постоянном потокосцеплении и частоте ротора электромагнитный момент АД также является константой и не зависит от частоты вращения, т.е. при изменении частоты вращения в любых пределах частота статора 1 изменяется таким образом, чтобы выполнялось условие – 1– = 2=const. При этом АД обладает абсолютно мягкой механической характеристикой. В 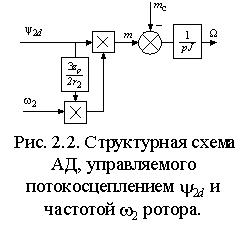 реальном АД ток статора формируется в неподвижной системе координат, поэтому его модель содержит внутренний блок вращения вектора тока или ротатор ( рис. 2.1), с помощью которого осуществляется переход от неподвижной системы координат - к системе d-q, ориентированной по потокосцеплению. Текущий угол поворота вектора тока определяется частотой статора . реальном АД ток статора формируется в неподвижной системе координат, поэтому его модель содержит внутренний блок вращения вектора тока или ротатор ( рис. 2.1), с помощью которого осуществляется переход от неподвижной системы координат - к системе d-q, ориентированной по потокосцеплению. Текущий угол поворота вектора тока определяется частотой статора .Выражения (2.2.4)–(2.2.6) определяют связь между проекциями тока статора на оси координат, потокосцеплением, частотой ротора и электромагнитным моментом АД. Из выражения (2.2.6) и уравнения движения следует, что управление моментом может осуществляться безинерционно двумя входными сигналами: потокосцеплением и частотой ротора в соответствии со структурной схемой рис. 2.2. Но эти сигналы связаны с проекциями вектора тока статора выражениями (2.2.5). Поэтому, если построить блок управления, реализующий передаточные функции в соответствии с выражениями (2.2.4), и называемый блоком развязки координат (РК), а также ротатор, вращающий вектор тока статора в направлении противоположном действию внутреннего ротатора АД (рис. 2.3), то входными сигналами для этого устройства управления будут потокосцепление и частота ротора. Название блока развязки координат происходит от выполняемой им функции формирования сигналов, соответствующих независимым (развязанным, разделённым) проекциям вектора тока статора. 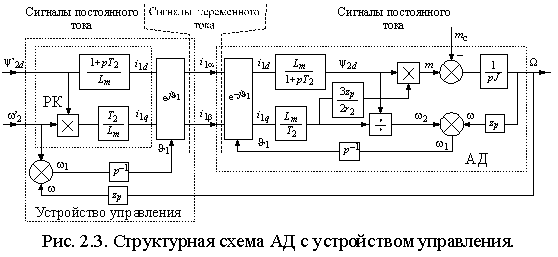 По структурной схеме нетрудно проследить, что передаточная функция блоков, включенных между точками схемы соответствующими сигналам поотоксцепления и частоты ротора равна единице (), т.е. устройство управления по существу является частью модели АД с обратными передаточными функциями. Поэтому формально структура рис. 2.3 полностью идентична структуре рис. 2.2, однако с помощью моделирования легко убедиться, что переходные процессы в этих структурах существенно различаются. Это связано с тем, что в структуре рис. 2.2 исключены инерционные звенья, присутствующие в реальной машине и в устройстве управления, которые реализуют операции интегрирования и дифференцирования за конечный промежуток времени. Из выражения для электромагнитного момента (2.2.6) и общего уравнения движения можно получить передаточную функцию АД по каналу управления частотой ротора
где – механическая постоянная времени. Эта передаточная функция полностью соответствует двигателю постоянного тока, поэтому построение систем электропривода с векторным управлением АД ничем не отличается от приводов постоянного тока. Следует отметить, что устройство управления рис. 2.3 может выполнять свои функции только при условии, что параметры АД, входящие в передаточные функции его звеньев соответствуют истинным значениям, в противном случае потокосцепление и частота ротора в АД и в устройстве управления будут отличаться друг от друга. Это обстоятельство создает значительные трудности при реализации систем векторного управления на практике, т.к. параметры АД изменяются в процессе работы. В особенности это относится к значениям активных сопротивлений. 2.3. Модель АД, управляемого напряжением статора, в системе координат, ориентированной по потокосцеплению ротора Управление АД можно осуществлять также с помощью проекций вектора напряжения статора на оси d-q. Для этого нужно получить модель АД, в которой входными величинами являются u1d и u1q. Если координатная система вращается вместе с потокосцеплением ротора, то ее угловая частота равна 1, поэтому, полагая в (1.5.3 а) (xy) = 1, получим уравнение статора в системе координат d-q:
а затем, выразив ток ротора из (1.2.8б) и подставив его в (1.2.8 а), мы получим выражение для потокосцепления статора в виде:
где: и – коэффициенты связи статора и ротора; – общая индуктивность рассеяния со стороны статора. Подставляя (2.3.2) в (2.3.1) и преобразуя это уравнение по Лапласу, получим
Разделив проекции векторов на оси d и q в уравнении (2.3.3), мы получим с учетом того, что 2q=0, выражения для проекций напряжений статора, представленные через проекции токов статора – ; Отсюда найдем выражения для проекций тока статора i1d и i1q
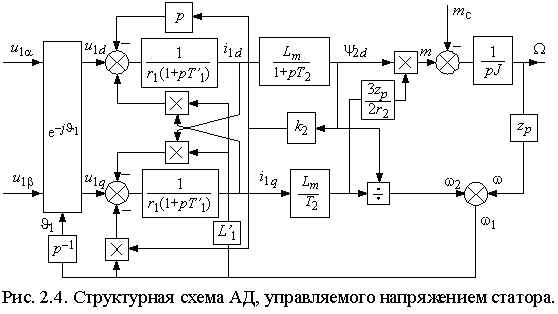 и, используя структуру АД, управляемого током статора, построим структурную схему АД, управляемого напряжением (рис. 2.4). Она нелинейна и содержим перекрестные связи. Входными величинами являются проекции напряжений статора на оси d и q – u1d и u1q. и, используя структуру АД, управляемого током статора, построим структурную схему АД, управляемого напряжением (рис. 2.4). Она нелинейна и содержим перекрестные связи. Входными величинами являются проекции напряжений статора на оси d и q – u1d и u1q.Для приведения ее структуры к структуре рис. 2.2 нужно построить устройство управления с функциями аналогичными устройству управления привода с заданием тока статора. С этой целью можно использовать выражения (2.2.4), подставляя, которые в (2.3.4) получим передаточные функции блока развязки координат в виде:
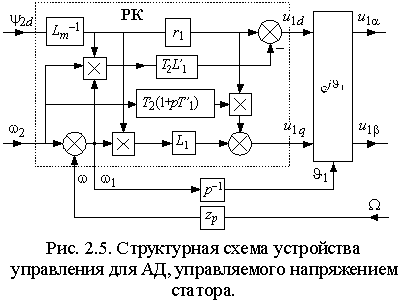 Очевидно, что реализация этих функций затруднительна и на практике ошибки выполнения математических операций и отклонения параметров АД от значений включенных в передаточные функции звеньев приведут к полной неработоспособности устройства. Облегчить задачу можно, если учесть, что ротор АД обладает очень большой электромагнитной постоянной времени и его потокосцепление может изменяться только относительно медленно, т.е.
Тогда выражения (2.3.5) преобразуются к виду: Структурная схема устройства управления, в котором реализованы эти функции приведена на рис. 2.5. Оно существенно сложнее, чем устройство управления для системы c формированием тока статора АД (см. рис. 2.3). Кроме того, в нем использованы приближенные выражения (2.3.7), вносящие ошибку в динамических режимах, если не выполняются условия (2.3.6). 2.4. Основные элементы систем векторного управления АД 2.4.1. Усилитель мощности релейного типа 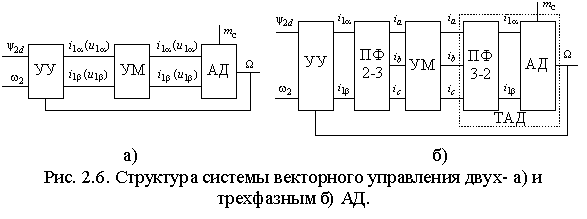 Независимо от того, какой вектор используется для управления АД (тока или напряжения), на выходе устройства управления формируются синусоидальные сигналы с переменой амплитудой, частотой и фазой, соответствующие мгновенным значениям проекций вектора тока или напряжения статора на неподвижные оси координат. Эти сигналы должны быть усилены по мощности с минимальными искажениями. Поэтому между выходом устройства управления (УУ) и статором АД необходимо включить усилитель мощности (УМ) (рис. 2.6). В качестве УМ могут использоваться устройства непрерывного и дискретного типов. Очевидно, что при мощностях выше нескольких сотен Ватт аналоговые усилители мощности не могут применяться, поэтому в приводе с векторным управлением в основном используются транзисторные и тиристорные инверторы с различными законами управления и непосредственные преобразователи частоты. Для правильной работы системы векторного управления УМ должны обладать единичной передаточной функцией, т.к. ошибка формирования тока или напряжения вызывает нарушение ориентации соответствующего вектора. На практике достаточно, чтобы частота коммутации УМ при всех режимах работы системы приблизительно на порядок превосходила частоту основной гармоники. 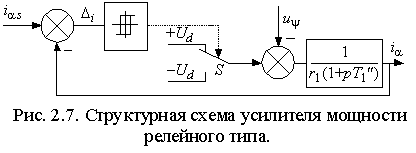 При рассмотрении структурных схем векторного управления было отмечено, что системы с формированием тока статора существенно проще в реализации. В свою очередь, в дискретном УМ формирование тока статора проще всего выполнить с помощью релейной системы управления, показанной на рис. 2.7. В ней управление силовым ключом S осуществляется двухпозиционным релейным элементом с гистерезисом таким образом, что на статорную обмотку подается положительное или отрицательное постоянное напряжение в соответствии с условиями:
где – соответственно реальный и заданный ток обмотки; – ширина петли гистерезиса релейного элемента. В интервалах между коммутациями S УМ представляет собой линейную систему, передаточную функцию которой можно получить из уравнения статора в неподвижной системе координат (1.4.2) , если в нем исключить потокосцепление статора, пользуясь выражениями (1.2.9)–
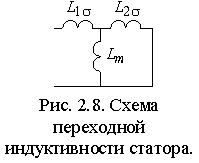 где: – переходная индуктивность статора; – падение напряжения создаваемое в обмотках статора магнитным потоком ротора. Из выражения для переходной индуктивности статора следует, что она соответствует электрической цепи рис. 2.8. Так как взаимная индуктивность Lm существенно больше индуктивности рассеяния ротора (), то с погрешность не более 2% можно считать, что . Перейдем в векторном уравнении (2.4.2) к проекциям на оси координат , совместив вектор напряжения статора с осью , тогда:
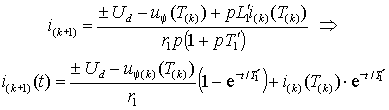
Проекции векторов на ось , совмещенную с осью фазной обмотки a статора, являются реальными величинами. При достаточно малом значении гистерезиса реле () коммутация ключей будет происходить с высокой частотой, поэтому можно считать, что в интервале между коммутациями напряжение, создаваемое потоком ротора остается неизменным, т.е. . Тогда, преобразуя выражение (2.4.3 а) по Лапласу, получим для (k+1)-го интервала между коммутациями
где – постоянная времени переходного процесса; – ток статора и напряжение в конце k-го межкоммутационного интервала длительностью . Выражение (2.4.4) можно упростить с учетом того, что длительности межкоммутационных интервалов существенно меньше постоянной времени. Поэтому экспоненту в первом слагаемом можно заменить касательной к ней в начальной точке, а второе слагаемое считать константой, пренебрегая его изменением за время . Тогда –
Знаки перед в выражениях (2.4.3 2.4.5) следует выбирать в соответствии с условиями (2.4.1). Для обеспечения возрастания тока необходимо выбрать значение напряжения питания таким образом, чтобы во всех интервалах с положительными значениями соблюдалось условие . На практике это значение выбирают из соотношения . Временные диаграммы работы УМ в соответствии с (2.4.5) приведены на рис. 2.9. 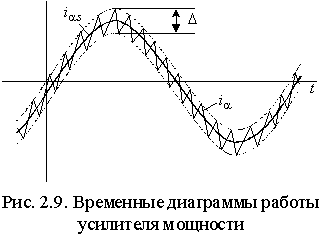 Изменение напряжения приводит к тому, что коммутация ключа S (рис. 2.7) происходит с переменной частотой. Длительность межкоммутационного интервала можно определить из выражения (2.4.5) с учетом того, что разность значений тока в начале и конце интервала равна гистерезису релейного элемента –  Усилитель мощности с релейным элементом можно считать безинерционным звеном с единичной передаточной функцией, если число коммутаций за период формируемого тока не менее 20 30, а гистерезис релейного элемента не более 5 7% максимального значения тока. |
 или
или .
. .
.

 ,
, ,
, ,
, ;
; .
. ,
, ,
, .
.