Учебное пособие по дисциплине. Учебное пособие в оронеж 2006 Воронежский государственный технический университет Е. И. Воробьева
 Скачать 5.5 Mb. Скачать 5.5 Mb.
|

3.5.3. Орбиты спутников связи, способы вывода спутников на орбитуВыбор формы орбиты (круговая, эллиптическая, высокоэллиптическая), наклонения (полярная, наклонная с заданным углом наклона, экваториальная), величины периода и характера обращения орбиты вокруг Земли (синхронная, геостационарная) является определяющим при проектировании той или иной системы спутниковой связи и в свою очередь обусловливается задачами проектируемой системы. Начиная с первых запусков спутники связи почти всегда образуют систему. Одиночные ИСЗ связи широкого использования применяются редко. В спутниковых системах связи используются низкоорбитальные аппараты, высокоэллиптические ИСЗ и геостационары. На пороге XXI века коммерческая спутниковая связь достигла достаточно высокого уровня развития. Почти все ныне действующие системы подвижной связи основаны на применении спутников, вращающихся на геостационарных и высокоэллиптических орбитах; однако аналитики ожидают, что в ближайшее время ситуация коренным образом изменится. По их прогнозам, даже в странах с развитой инфраструктурой около 35% потребностей в услугах будут обеспечивать глобальные системы персональной связи. Концепцию персональной спутниковой связи можно реализовать в системах, использующих спутники на геостационарных, средневысотных и низких орбитах. Основные типы орбит: GSO — геостационарная (до 36 000 км), МЕО — средневысотная (до 15 000 км), LEO — низкая (до 1500км) По углу наклона (угол между плоскостью орбиты и плоскостью экватора )орбиты делят на следующие типы: экваториальные (=0); полярные (=90); наклонные (0<<90). По форме орбиты: эллиптические (эксцентриситет 0<е<1); круговые (е=0). По высоте орбиты: низкие (h=150-5000 км) с малым периодом обращения (1-3 часа); высокие (h>5000 км) с большим периодом обращения. Если требуется, чтобы сеанс связи повторялся в одно и то же время суток, то применяют синхронные или субсинхронные орбиты, для которых период обращения равен длительности суток, деленное на целое число. Если один ИСЗ не обеспечивает круглосуточной связи, то используют несколько ИСЗ, смещенных по положению на орбите. Орбита с периодом 24 часа называется стационарной, если ИСЗ движется в сторону вращения Земли с =0 называется синхронной (спутник неподвижен относительно Земли). Полустационарная стабильная орбита - с наклоном 63,5 с периодом обращения 24 часа (проекция на землю - повторяющиеся восьмерки). Согласно 2-му закону Кеплера радиус - вектор спутника в равные промежутки времени описывает равные площади. Поэтому движение ИСЗ на большой высоте (в апогее) замедляется, а в перигее ускоряется. Низкие орбиты применяют для обеспечения связи непосредственно с мобильных переносных радиотелефонов. Достоинства: проще выводить спутник на орбиту (малые затраты); меньше затухание (ослабление) сигнала. Недостатки: на малых высотах магнитное поле Земли имеет относительно большую напряженность и захватывает протоны с высокой энергией, образуя радиационные пояса Ван - Аллена. При движении в них спутника уровень радиации так высок, что солнечные элементы и другие полупроводниковые приборы быстро выходят из строя. Используют защитные покрытия или применяют более стойкие приборы, что ухудшает характеристики системы. магнитное поле Земли взаимодействует с полем токонесущих проводников и оболочки спутника, стабилизируемого вращением, что замедляет скорость его вращения. Требуется периодическая коррекция траектории спутника, что приводит к необходимости увеличения запасов топлива на борту ИСЗ. значительную часть времени спутник находиться в тени Земли, что приводит к увеличению емкости аккумуляторов и к увеличению числа солнечных батарей, чтобы за время нахождения на Солнце зарядить их. необходимость использования нескольких спутников для обеспечения круглосуточной связи. сложная система слежения за спутником. Период обращения спутника определяется выражением Обращение спутника по круговой орбите с периодом, равном периоду вращения Земли (длительность сидерических суток 23 ч 56 мин 4,09 с), требует вывода спутника на высоту 35800 км. В экваториальной плоскости такой спутник будет неподвижен по отношению к любой точке на Земле (геостационарный спутник). В других плоскостях на этой высоте он будет каждые сутки описывать восьмерки относительно Земли. Геостационарная орбита обладает следующими свойствами: земная станция может работать с одним или (при наличии многолучевой антенны) с несколькими спутниками без необходимости перехода на связь с одного спутника на другой (при нестационарных спутниках). Три спутника, размещенных соответствующим образом могут перекрыть всю Землю. Недостатки: вывести спутники на такую орбиту довольно трудно; не обеспечивается покрытие полярных районов. Обжитые области земного шара расположены большей частью в пределах геостационарных спутников. Поэтому для покрытия этих районов требуется использование высоких и средних орбит. Поддержка связи с высокими широтами необходима для сбора данных и в военной связи. На средневысотные полярные орбиты можно выводить гораздо большую полезную нагрузку. Высокая орбита - орбита спутника "Молния" (СССР), используется для внутригосударственной связи. Эта орбита позволяет покрыть районы Дальнего Севера без уменьшения полезной нагрузки. Спутники "Молния" имеют сильно вытянутую эллиптическую орбиту с периодом обращения 12 ч и апогеем 40000 км в северном полушарии, перигеем 500 км. Обычно главная ось любой эллиптической орбиты, называемая линией апсид, совершает медленное вращение вследствие несферичности Земли ("сплющенности" у полюсов). При некотором значении угла наклонения орбиты (около 62) этот эффект исчезает. Орбита с 12-часовым периодом при этом угле наклонения и апогее в северном полушарии оказывается удобным для покрытия северных районов. Эта орбита отличается тем, что на нее легко вывести полезную нагрузку со стартовых площадок, расположенных в северных широтах. Баллистические закономерности запуска таковы, что при любом угле наклонения орбиты, значение которого меньше широты стартовой площадки (например, для экваториальной), требуется особый маневр. Для стартовых площадок, расположенных в северных широтах, потери выводимой на орбиту полезной нагрузки довольно значительны. Это повлияло на СССР применить наклонную орбиту при запуске спутников со стартовых площадок, расположенных выше 45 с.ш. и на Францию разместить стартовые площадки во Французской Гвиане. Покрытие северных районов достигается за счет одновременного функционирования нескольких спутников. Такая система часто менее удобна, чем система синхронных спутников. Первая космическая скорость 7,91 км/с. Рассмотрим схему траектории, считая, что движение ракет - носителей и спутников относительно Земли определяется классическими законами Ньютона для двух испытывающих гравитационное взаимодействие тел в изолированном пространстве. Исходя из этого, полная энергия такой системы двух тел определяется выражением Когда спутнику сообщается количество энергии, достаточное для его вывода на геостационарную орбиту, носитель должен вывести спутник в точку, удаленную от центра Земли на 42160 км (радиус Земли на экваторе составляет 6360 км) и сообщить ему скорость равную 3070 м/с. Вследствие физических ограничений не удается с помощью носителя сообщить эту энергию спутнику путем непрерывно протекающего процесса. В эквипотенциальном поле максимальное приращение скорости V реактивной системы определяется соотношением:  , где с - эффективная скорость истечения газа, зависящая от типа топлива и размеров сопла; m0 - полная масса системы, выводимой на орбиту; mf - масса израсходованного топлива. , где с - эффективная скорость истечения газа, зависящая от типа топлива и размеров сопла; m0 - полная масса системы, выводимой на орбиту; mf - масса израсходованного топлива. Максимальное приращение скорости в пределе ограничивается практически достижимыми значениями параметров двигателя, т.е. скоростью истечения газа и конструкцией ракеты-носителя (mf/m0). Из приведенного уравнения следует, что одна ракета не в состоянии обеспечить приращение скорости, достаточное для вывода спутника непосредственно на орбиту. Чтобы обойти это ограничение, используют процедуру многоступенчатого вывода, которая обеспечивает необходимое конечное значение скорости за счет последовательного использования нескольких ступеней, каждая из которых включается после полного выгорания топлива предыдущей ступени и ее отторжения. Системы, использующие низкие орбиты (высотой 700-1500 км), обладают лучшими энергетическими характеристиками, нежели системы на высоких орбитах, но проигрывают им в продолжительности активной эксплуатации спутника. Так, если период обращения низкоорбитального КА составляет 100 мин, то в среднем 30 мин он находится на теневой стороне Земли. Соответственно, аккумуляторные батареи на борту низкоорбитальных спутников должны обеспечивать приблизительно 5000 циклов зарядки/разрядки в год. Срок службы низкоорбитальных спутников, как правило, не превышает 5-7,5 лет; один аппарат способен охватить не более 6-7% территории Земли. Трасса средневысотных КА проходит между первым и вторым поясами Ван-Аллена, т.е. на высоте 5000-15 000 км. Один спутник может охватить около 25% поверхности Земли, что существенно больше зоны низкоорбитального спутника. Срок службы КА от 10 до 15 лет. Период его обращения на средневысотной орбите составляет около 6 ч, из которых он лишь несколько минут проводит в тени Земли, поэтому длительность циклов зарядки/разрядки солнечных батарей и их частота становятся в несколько раз меньшими, чем у низкоорбитальных систем. Это значительно облегчает работу бортовой системы электропитания и, в конечном счете, увеличивает срок службы КА до 12-15 лет. Для круговых орбит с высотой 10 000 км средняя продолжительность обслуживания составляет около 50 мин. (Для сравнения: в низкоорбитальной системе Iridium средняя продолжительность сеанса - 6 мин, а в Globalstar - 7 мин.) Первыми для целей связи были применены низкоорбитальные ИСЗ. Это объясняется, в частности, и тем, что вывод ИСЗ на низкие орбиты более прост и выполняется с наименьшими энергетическими затратами. Первые запуски низкоорбитальных спутников связи показали возможность и целесообразность применения ИСЗ для связи, подтвердили правильность технических принципов активной ретрансляции. Вместе с тем из первого опыта эксплуатации спутников на низких орбитах стало ясно, что они не могут обеспечить достаточно эффективного решения задач спутниковой связи. Для расширения районов и увеличения времени действия ССС предусматривалось пойти по пути увеличения числа ИСЗ в системе. Вскоре, однако, стало ясно, что многоспутниковая система связи на низкоорбитальных ИСЗ как система общего пользования обладает многими эксплуатационными неудобствами и нерентабельна. В низкоорбитальных системах связи спутники могут размещаться в пространстве друг относительно друга случайно пли упорядоченно. При случайном расположении понадобится большее число ИСЗ, однако упорядоченное местоположение их в пространстве потребует немалых усилий для создания и сохранения заданного относительного расположения. При этом необходимы постоянный контроль местоположения спутников и корректировка орбит вследствие эволюции их в процессе полета. К достоинствам ССС на низких орбитах относятся, как уже отмечалось, сравнительная дешевизна вывода их на орбиту и более простая бортовая аппаратура. К недостаткам — трудность поддержания непрерывной круглосуточной связи, усложнения наземной аппаратуры за счет применения следящих антенных устройств, меньший срок существования КА. Низкоорбитальные ССС могут оказаться эффективными в тех случаях, когда не требуется двусторонняя непрерывно действующая связь (например, если нужна лишь периодическая передача данных). Для охвата связью большей территории Земли используют несколько плоскостей орбит. В системе обычно имеется одна или несколько станций управления спутниками и сетью связи, а также шлюзовые станции для интерфейса с сетями телефонии (передачи данных) общего пользования. Повышенный интерес к использованию низкоорбитальных систем объясняется возможностью предоставления услуг персональной связи, включая радиотелефонный обмен и связь с подвижными объектами, с использованием сравнительно дешевых, малогабаритных земных терминалов. При этом сложность терминалов соответствует уровню станций наземных сотовых систем. В числе факторов, способствующих развитию низкоорбитальных спутниковых систем нельзя не учитывать биологический. Так, для реализации требований биозащиты человеческого организма от излучения СВЧ рекомендуемый уровень непрерывно излучаемой мощности радиотелефона составляет 50мВт. Эффективный прием сигнала такой мощности геостационарным спутником сопряжен со значительным усложнением последнего, а именно, созданием крупноразмерных антенн и удержания узких лучей диаграммы направленности в заданных регионах земной поверхности. Для низкоорбитального спутника, дальность радиолинии до которого от земной станции в сотни раз меньше, чем до геостационарного, проблема создания многолучевых направленных антенн является менее острой. Однако возникают сложности управления группировкой таких спутников и поддержания непрерывности связи. Низкоорбитальные системы позволяют обеспечить связь с терминалами, размещенными в полярных широтах, и практически не имеют альтернативы при организации связи в регионах со слаборазвитой инфраструктурой связи и низкой плотностью населения. Стоимость услуг подвижной связи низкоорбитальными системами оказывается в несколько раз дешевле аналогичных услуг, предоставляемых геостационарными системами за счет использования недорогих абонентских станций и менее дорогого космического сегмента. 3.5.4 Способы модуляции и формирование групповых сигналов аналоговых и цифровых СССВ N-канальной системе число фильтров и их типов равно Nn, где n - число ступеней преобразования. Число фильтров и их типов можно уменьшить, если дополнить многократное преобразование групповым, при котором преобразованию подвергается групповой сигнал. С этой целью N каналов разбивается на m групп по K каналов, т.е. Km=N. В каждой группе сигнал каждого канала подвергается индивидуальному преобразованию с помощью несущих частот w Н1, w Н2,..., w НК (Рис.3.51). Во всех группах преобразование однотипно, поэтому на выходе каждой группы образуется один и тот же спектр частот. Полученные групповые спектры подвергаются затем групповому преобразованию с несущими w ГР1, w ГР2,..., w ГРm, так что после объединения преобразованных групповых сигналов образуется спектр частот N каналов. В рассматриваемом случае общее число фильтров равно N+mnГР, а число типов фильтров сокращается до K+mnГР, где nГР - число групповых ступеней преобразования. 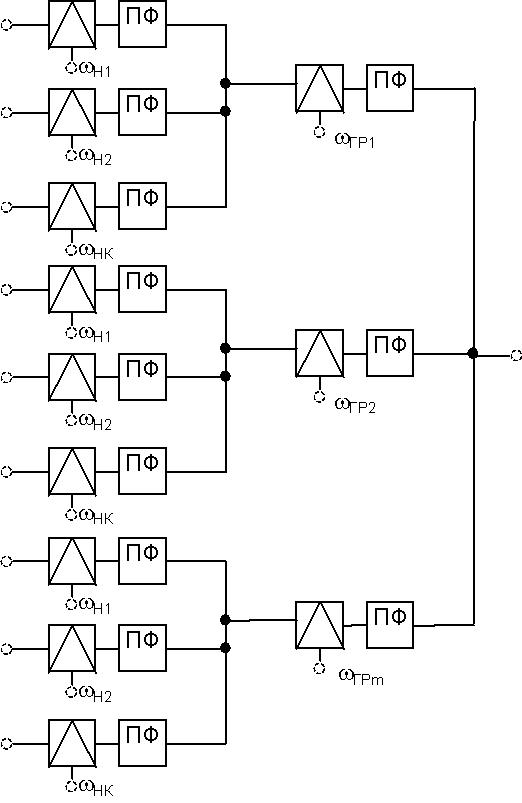 Рис.3.51 Групповое преобразование частоты Таким образом, применение многократного и группового преобразования позволяет унифицировать фильтровое оборудование системы, т.е. уменьшить его разнотипность. Такая унификация повышает технологичность изготовления узлов аппаратуры и, в конечном счете, удешевляет ее. Уплотнение - это процесс объединения множества несущих информацию сигналов в подлежащий передаче групповой сигнал, сосредоточенный в одной частотной полосе. Задача решается либо бортовыми, либо земными средствами. Может быть использовано почти любое сочетание: - методов, применяемых при модуляции в земной аппаратуре; - уплотнении в земной аппаратуре; - модуляции несущей на спутниковой линии; - многостанционном доступе. Так, в системах INTELSAT, TELESAT, DSCS-1 и Молния используется однополосная амплитудная модуляция при частотном уплотнении и разделении каналов (ЧУ), частотной модуляции на спутниковой линии и различные несущие частоты для каждой ЗС. Систему ВМДВ можно назвать ИКМ/ВУ/ЧФМ/МДВУ. Система SPADE с одним каналом на несущую обозначается: ИКМ/ЧФМ/МДЧУ. В земной аппаратуре наиболее распространено частотное уплотнение и разделение каналов (ЧУ). Системы ЧУ включают в себя: а) однополосные системы с подавленной несущей (ОБП); б) однополосные системы с передаваемой несущей (ОБП-ПН); в) двухполосные системы с подавленной несущей (ДБП); г) двухполосные системы с передаваемой несущей (ДБП-ПН). В основном применяется ОБП. В системах временным разделением применяют: - дискретные методы; - цифровые методы. Обычно ВУ сочетается с МДВУ, а ЧУ - с МДЧУ, но возможны и смешанные системы. Передача ТВ сигналов и сигналов звукового сопровождения. Согласно плану ВАКР-77 максимальная скорость передачи в ТВ канале не превышает 20 Мбит/с. Но для передачи высококачественного цветного изображения необходима скорость передачи не менее 34 Мбит/с. Поэтому для первого поколения спутниковых систем ТВ применялись аналого-цифровые методы, когда часть информации передавалась в аналоговой форме, а часть - в цифровой. Одна из таких систем - система МАС (Multiplexing Analogue Components -составной сигнал с аналоговыми компонентами). В этой системе аналоговый сигнал яркости передается поочередно (методом временного разделения) с сигналами цветности, преобразованными в дискретную форму, что позволяет избежать перекрестных искажений сигналов яркости и цветности, снизить шумы в канале цветности благодаря переводу его в область низких частот. Сигналы звукового сопровождения, синхронизации, данных передаются совместно с сигналами цветности в общем цифровом потоке. В самом простом варианте сигнал яркости передается в реальном масштабе времени в течение активной части строки, а цифровой поток - в интервале строчного гасящего импульса, причем сигнал цветности предварительно сжимается во времени. На приеме суммарный цифровой поток демультиплексируется. Поток, соответствующий сигналу цветности, растягивается и сдвигается во времени для восстановления первоначальных пропорций, а затем подается на декодирующее устройство. В более сложной системе сжимаются во времени и сигнал яркости, и сигнал цветности, а разделение производится на периоде не только строки, но и кадра. Это позволяет изменять формат кадра. В результате исследований ЕСР выбран коэффициент сжатия 3/2 для сигнала яркости и 3 для сигналов цветности. На передающей стороне сигнал яркости задерживается на период кадра по отношению к сигналу цветности, на приеме же сигнал яркости проходит без изменений, а сигнал цветности растягивается во времени и задерживается на период кадра, так что восстанавливается их первоначальное соотношение. Одной из наиболее сложных проблем спутникового телевидения (СТВ) является способ передачи звуковых сигналов в ТВ канале. Теоретические исследования и эксперименты показали, что методом аналоговой ЧМ в диапазоне 12 ГГц удается передать совместно с сигналом изображения не более двух звуковых программ с отношением сигнал/шум порядка 50-55 дБ, причем частота второй поднесущей должна быть подобрана так, чтобы не создавать помех в канале цветности. Например, для TV-SAT были выбраны значения поднесущих 5,5 МГц и 5,746128 Способ передачи цифрового потока совместно с сигналами изображения должен удовлетворять определенным требованиям: качество передачи изображения не должно ухудшаться; вероятность ошибки при передаче звуковых сигналов не должна превышать 10-3 при отношении C/N=8 дБ; необходима совместимость с существующими ТВ приемниками. Можно выделит три способа передачи сигналов изображения и цифрового потока: - с разделением по частоте (система МАС-А); - с разделением по времени на видеочастоте (МАС-В); - с разделением по времени на несущей частоте (МАС-С). Система МАС-А. Цифровой поток передается на поднесущей частоте, превышающей верхнюю частоту спектра видеосигнала. Частота поднесущей выбирается из соотношения Среди методов цифровой модуляции предпочтение отдано двухпозиционной фазовой манипуляции с частично подавленной боковой полосой, называемой также “ упрощенной MSK” (Minimum Shift Keying), благодаря ее простоте и применимости когерентного демодулятора на приеме. Система МАС-В. Уплотнение видеосигнала цифровым потоком на видеочастоте основано на использовании некоторой избыточности ТВ сигнала - наличии в каждой строке интервалов обратного хода лучей, в которых передаются только сигналы синхронизации. Вводя ИКМ последовательность в указанные интервалы, можно передать от двух до четырех звуковых программ, не увеличивая общую полосу частот, занимаемую видеосигналом. Преимуществом такого способа передачи является отсутствие отдельного демодулятора для звуковых сигналов, так как цифровая последовательность получается на выходе общего частотного детектора. Система МАС-С. Используется фазовая манипуляция несущей частоты в интервале гасящего импульса. Мгновенная скорость передачи в этом случае ограничивается полосой пропускания радиоканала и достигает 20 Мбит/с, а средняя скорость 3,75 Мбит/с. Если сигнал цветовой синхронизации передается обычным образом, то средняя скорость цифрового потока составляет 2,8 Мбит/с. Важным является выбор типа модуляции, при которой должна сохраняться огибающая модулированного сигнала для снижения АМ/ФМ преобразования в бортовой ЛБВ и для предотвращения генерации паразитных составляющих из-за нелинейности амплитудной характеристики ретранслятора. Некоторые преимущества имеет смешанная двух-четырех позиционная фазовая манипуляция, в которой скачки фазы равны 900. 3.5.5 Способы модуляцииВ спутниковых системах связи используется ИКМ, -модуляция, узкополосная ЧМ. При частотной модуляции частота несущего колебания меняется дискретно в зависимости от значения модулирующего сигнала. На практике находит применение не только двоичная ЧМ, но так же 4-х (Рис.3.51) и 8-уровневая ЧМ. При использовании многоуровневой ЧМ исходная двоичная последовательность разбивается на соответствующее число бит (дибит, трибит и т.д.) для определения одной из возможных частот несущей, передаваемой в данный момент. 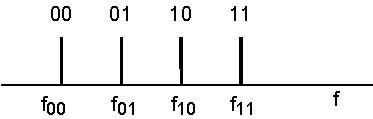 Рис. 3.52 Четырехуровневая частотная модуляция. Два основных метода преобразования аналоговых сигналов в цифровую форму - импульсно-кодовую (ИКМ) и дельта-модуляцию (ДМ), которые традиционно относят к видам модуляции, хотя таковыми они, по сути, не являются, поскольку не связаны, как это характерно для всех остальных видов модуляции, с изменениями параметров несущей частоты. Импульсно-кодовая модуляция (ИКМ) - наиболее общий метод кодирования источника. При ИКМ не важна степень корреляции между отсчетами. С помощью ИКМ можно кодировать любой аналоговый сигнал с ограниченной шириной спектра. Единственное условие - частота дискретизации должна удовлетворять условию теоремы Котельникова. ИКМ характеризуется малой задержкой в процессе кодирования-декодирования, которая не превышает одного периода выборки. ИКМ кодеры и декодеры наиболее просты в реализации. Основной недостаток ИКМ кодирования - невысокая эффективность с точки зрения сжатия сигнала, возможности снижения скорости при ИКМ ограничены. Дельта модуляция представляет собой частный случай ДИКМ при использовании одноразрядного квантователя (R=1). Дельта-модуляцию широко применяют благодаря ее простоте. При ДМ по каналу связи передают квантованное значение разницы между текущим значением отсчета и его предсказанием, причем квантование проводят всего по двум уровням: 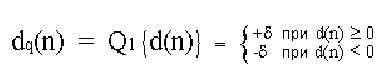 , ,где d - шаг увеличения или уменьшения d(n). Таким образом, ДМ не обладает каким-либо преимуществом в скорости перед ДИКМ. Однако построение ДМ кодера и декодера существенно проще. Именно этим объясняется широкое распространение ДМ. Сигналы наземных станций поступают на вход ретранслятора в различные моменты. Спутник в соответствии с существующей в системе шкалой времени формирует из поступающих сигналов многостанционный групповой сигнал - так называемый суперкадр - и ретранслирует его на Землю (рис. 12). По методу ВМД/ВРК (ВМД при временном разделении каналов) сигнал каждой станции представляет собой группу импульсов, составленную из импульсов отдельных каналов. Положение каждого канала однозначно определяется синхрословом, передаваемым в начале кадра. В сформированном спутником суперкадре групповые сигналы каждой наземной станции разделяются благодаря временной.“привязке” кадров к синхросигналу, находящемуся в начале суперкадра. 3.5.6 Многостанционный доступ (МД).Наиболее серьезной проблемой для спутниковой системы является проблема многостанционного доступа. Сущность его состоит в том, что каждая наземная станция имеет возможность пользоваться ретранслятором для передачи своих сигналов независимо от работы другой станции и устанавливать связь через спутник с любой наземной станцией данной системы. Это придает всей системе гибкость в работе, однако накладывает на ретранслятор ряд дополнительных функций. Многостанционный доступ можно организовать так, что между каждой парой станций будет закреплена линия. Возможен, однако, и многостанционный доступ по требованию, когда связь организуется в порядке очереди при наличии свободной линии. Так как принципиально сигналы можно различать по частоте, по времени, в пространстве, а также по форме при использовании кодированных сигналов можно организовать четыре вида доступа: частотный многостанционный доступ (ЧМД), временной многостанционный доступ (ВМД), пространственный многостанционный доступ (ПМД), кодовый многостанционный доступ (КМД). В основе этих видов доступа лежат соответствующие принципы разделения сигналов. Различают следующие виды многостанционного доступа: 1) пространственный МД (ПМД). Состоит в разделении пространства на области с помощью антенн с узкими диаграммами направленности путем совместного использования частот (при разделении по поляризации). Его использование предоставляет для спутниковых систем дополнительные возможности. Гибкость системы обеспечивается ценой усложнения бортовой аппаратуры и увеличения массы. 2) частотный МД (ЧМД)- наиболее распространенный. Состоит в том, что для каждой станции выделяется своя несущая частота. Позволяет использовать один бортовой ретранслятор для многих ЗС; пропускная способность ограничивается суммарным уровнем перекрестных шумов. Когда нелинейный усилитель усиливает сигналы на нескольких несущих, возникают перекрестные помехи, которые увеличивают общий уровень шума. Для понижения шума уменьшают мощность на входе усилителя ретранслятора, но при этом понижается уровень сигнала несущей частоты на приемном конце линии, из-за чего увеличивается влияние тепловых шумов приемника ЗС. Таким образом, уменьшение входной мощности усилителя-ретранслятора должно быть до некоторой оптимальной величины, но и при оптимизации это приводит к уменьшению мощности ретранслятора на 6 дБ по сравнению со случаем, когда вся информация передается на одной несущей. Метод эффективен, если величина мощности не ограничена. ЧМД можно реализовать двумя способами: а) каждая несущая уплотняется множеством каналов, как это делается в наземных системах связи; б) в бортовой аппаратуре для каждого канала (канала тональной частоты) используется своя несущая частота. В случае многих несущих усложняется проблема перекрестных помех. С другой стороны их уровень асимптотически приближается к некоторому предельному значению. Один канал на несущую (ОКН) подходит для систем, где много линий, в каждой из которых есть лишь несколько одновременно обслуживаемых каналов. Обычное уплотнение удобно для земной аппаратуры, но экономически оправдано, когда на каждой несущей передается групповой сигнал из 12 и более каналов. (Используются оба способа ЧМД). Вид модуляции: ИКМ, -модуляция, узкополосная ЧМ осуществляется на базе компромиссных решений. 3) временной МД. Используется при передаче больших потоков информации. Его идея заключается в том, что каждая наземная станция, использующая ретранслятор спутника, имеет закрепленный за ней временной канал - периодически повторяющийся интервал времени. Сигналы наземных станций поступают на вход ретранслятора в различные моменты. Спутник в соответствии с существующей в системе шкалой времени формирует из поступающих сигналов многостанционный групповой сигнал - так называемый суперкадр - и ретранслирует его на Землю (рис. 3.53).  Рис. 3.53 Каждой ЗС выделяется определенный временной интервал для передачи, и все ЗС работают с данным ретранслятором ИСЗ на одной и той же несущей. Не возникают перекрестные шумы, и повышается пропускная способность системы, но требует значительного усложнения земного оборудования. ВМД более эффективны, чем ЧМД. Спутниковая система с ВМД исключительно гибкой с точки зрения сочетания различного типа пользователей. Эта система удовлетворяет требованию, чтобы сигналы спутниковой системы без преобразования передавались по наземным линиям и распределялись по оконечным устройствам потребителей, к которым относятся телетайпы, дисплеи, компьютеры, факсимильные аппараты. ВМД легко сочетается с ПМД, так как достаточно переключать пакеты с одного с антенного луча на другой, в соответствии с их пунктом назначения, но возрастает сложность аппаратуры. ВМД с коммутацией на спутнике обеспечивает увеличение пропускной способности на 30%, по сравнению с ЧМД. В системе КС/ВМД есть один ствол шириной 400 МГц, в отличие от ЧМД, где используются 5 стволов по 80 МГц. Бортовая коммутация с временным разделением производится в течение наносекунд, чтобы последовательные пакеты успевали переключаться на разные узконаправленные лучи. 4) кодовый МД. Состоит в том, что передаваемая с каждой ЗС информация кодируется с применением псевдослучайных последовательностей, чтобы передача заняла всю ширину полосы ретранслятора. ЗС, для которой предназначена информация, имеет образец псевдослучайных последовательностей и с помощью коррелятора может выделить сигнал из шума, возникающего вследствие одновременной работы многих ЗС. Преимущества для военных систем, так как расширение спектра используется для повышения помехоустойчивости к организованным помехам, а псевдослучайные шумовые последовательности увеличивают стойкость засекречивания. Хуже используются мощность и частотный спектр, чем при МДЧУ, не говоря уже о МДВУ. Он требует дополнительного оборудования. 3.5.7 Структура кадраКадр - это выбранный временной интервал, через который цикл повторяется. Пакет - это сигнал, состоящий из модулированной несущей и занимающий закрепленный временной промежуток в кадре. Опорный или синхро-пакет (S) появляется в начале кадра и имеет особую структуру. Вследствие несовершенства синхронизации, между пакетами нужен защитный интервал (G). Пакет состоит из вводной части (преамбулы) (P), информационной части (М) и в некоторых системах - заключительной части (Q). Вводная часть (P) состоит из: - последовательности для восстановления несущей; - последовательности для восстановления тактовой синхронизации символов; - кодового слова пакета, предназначенного для синхронизации пакетов; - кода опознавания станции; - других служебных частей. Информационная часть (М) содержит поток сообщений, который может быть уплотнен или закодирован. Для сброса декодера или демодулятора используется заключительная часть (Q), состоящая из нескольких символов. Символ - это один из импульсов модулированной несущей, занимающий промежуток времени, называемый длительностью символа (Т) и определяемый тактовой частотой в пакете. Скорость передачи информации (R) называется мгновенная скорость следования посылок в пакете. Геостационарные спутники должны оставаться в области пространства, ограниченной квадратом со стороной 0,1. Из-за эллиптичности орбиты высота ИСЗ изменяется в пределах 0,1%. Таким образом, спутник может находиться в любой точке пространства, ограниченный параллелепипедом 25*25*75км. Длина диагонали параллелепипеда 83 км соответствует наибольшему изменению полной задержки на 500 мкс. Так как длина кадра МДВУ составляет сотни микросекунд, то необходима синхронизация. Синхронизация в ВМД - это предоставление всем станциям информации о временных соотношениях с целью предотвратить наложение пакетов в ретрансляторе, а также обеспечить правильную идентификацию пакетов. Вхождение в синхронизм - это процесс введения станции в синхронизм с работающей сетью ВМД. Ввод - это начало функционирования сети ВМД после периода отсутствия передачи. Кадровой эффективностью Э называется отношение части кадра, которая может быть использована, к полной длине кадра:  , ,где F- длина кадра, мкс; S- число символов в синхропакете; Pi- число символов в водной части пакета; Qi- число символов в заключительной части пакета; Gi- защитный интервал времени, выраженный в эквивалентном числе символов; N- число доступов (станций); T- длина символа, мкс ( R- скорость передачи, Мбит/с; m- размер передаваемого алфавита. Современные системы МДВУ имеют кадровую эффективность >90%. Методы синхронизации МДВУ. Имеются 6 классов методов синхронизации МДВУ: 1) Метод случайного доступа. Каждой станции разрешается случайный доступ. В простейшем случае информации о временных соотношениях не требуется, следовательно, некоторые пакеты перекрываются. Пример: переключение пакетов в системе ALONA и в системе ARPANET и адаптация. 2) Методы вида “опорный пакет + автоматическая синхронизация”. В сети станций, совместно использующих некоторый ретранслятор, одна станция передает опорный пакет, который проходит через ретранслятор и принимается всеми станциями. Каждая станция использует этот опорный пакет для установления кадровой синхронизации. Относительно получающейся точки отсчета станция может занять заданный временной интервал, но лишь приблизительно, так как точные значения задержек в линиях неизвестны. Каждая станция наблюдает за своей передачей и точно устанавливает положения своих пакетов; это называется автоматической синхронизацией или автоматическим определением длины пути. 3-подкласса: - Подкласс INTELSAT - самая большая группа систем. Применение опорных посылок, автоматическая синхронизация каждой станции (все станции охватываются главным лепестком глобального луча антенны ИСЗ), использование вводной части пакета со сложной структурой, распределенное управление. Опорные пакеты передаются с частотой кадров постоянной ведущей станцией. Эти короткие пакеты модулированы опорным кодовым словом. Каждая станция принимает их с целью обеспечения кадровой синхронизации путем апертурного стробирования. После предварительного определения дальности сигналами малого уровня станция, осуществляющая доступ, передает только вводную часть, располагаемую в середине выделенного временного интервала. Станция принимает свое кодовое слово, сравнивает его время прихода со временем прихода опорного кодового слова и синхронизирует свою передачу относительно опорных пакетов. Вход в синхронизм около 3 с. Используется обычное оборудование, необходимое для непрерывной синхронизации. Обязательно нужен опорный пакет. При выходе из строя опорной станции возможен перевод обычной станции в режим ведущей. Точность синхронизации связана с величиной защитных интервалов. Минимально достижимая величина их около 50 нс, при скорости передачи 60 Мбит/с, защитный интервал равен длительности трех символов. При двухфазной ФМ длина кодового слова равна 20 бит, при четырехфазной ОФМ длина слова равна 10 символам. Пример: INTELSAT, TTT (Япония), TDMA SYSTEM1 (Германия), SMAX (Япония), TELESAT (Канада), проект NTT (Япония), национальные системы США. - Подкласс “широкий луч - узкий луч”. МДВУ при использовании спутников с остронаправленными антеннами. Метод синхронизации подкласса INTELSAT используется в глобальном луче, а потоки сообщений передаются в узком луче. Каждый синхропакет в ретрансляторе с широким лучом имеет формат, подобный вводной части обычного пакета. Все требуемые временные соотношения при передаче пакетов через ретранслятор с узкими лучами обеспечиваются с помощью синхронизации, осуществляемой широким лучом и метод сравнения фаз для синхронизации при работе с широким лучом. Каждая станция передает общую частоту 1,33 кГц, соответствующую частоте следования кадров при их длительности 750 мкс. Этой частотой модулируется частота несущей, выделенной только для данной станции (МДВУ). Все ЗС принимают собственные сигналы и сигналы опорной станции, после чего производят сравнение фаз. Момент пересечения синусоидой нулевого уровня при положительной производной определяет начало кадра. - Подкласс “шлейф через партнера”. При использовании узконаправленных антенн. Каждой станции придается партнер, находящийся в зоне облучения. Партнер должен возвращать синхросигнал, обеспечивая тем самым возможность автоматической синхронизации через два пролета. Принцип называется также обратной петлей, а его разновидность “МДВУ с обратной связью”. 3) Синхронизация с помощью m - последовательностей. Используют свойства последовательностей максимальной длины. С помощью сигналов (широкополосных) низкого уровня с хорошими корреляционными характеристиками можно осуществить точную синхронизацию с минимальными помехами для системы. На этом принципе основана синхронизация системы оборонной связи (DSCS). 4) Метод окна. Метод основан на коммутации узконаправленных антенн на борту спутника в сочетании с МДВУ и МДПУ - это многостанционный доступ МДПУ/ПБ/МДВУ. ЗС должны синхронизироваться по коммутирующей последовательности, за которой осуществляется слежение в цепях подачи сигнала в антенну спутника. В коммутирующей последовательности создается временной зазор ограниченной длительности (обычно 1 мкс). ЗС передает сигнал синхронизации, который должен пройти через это окно. Когда такое условие выполнено с требуемой степенью точности, ЗС считается засинхронизированной. Синхронизация станции осуществляется в 3 этапа: в период “грубого поиска” оценивается положение пакета станции относительно окна; далее путем “точного поиска” уменьшается ошибка синхронизации. Ошибки, обусловленные движением спутника, сокращаются на третьем этапе, где осуществляется режим слежения. На этапе грубого поиска для оценки временных параметров используются ФМ сигналы двух типов: либо пакеты с ФМ; либо непрерывные поисковые ФМ сигналы. В первом случае пакеты, поступающие на спутник в неподходящие моменты времени, отсекаются окном. Если такие пакеты не принимаются, поиск продолжается до попадания пакетов в окно. Во втором случае закодированная часть ФМ сигнала возвращается с целью получения приблизительного результата. В процессе точного поиска периодически производится сравнение на каждом кадре переданного и принятого сигналов. 5) Определение дальности + предсказание. Благодаря предсказуемости орбиты, при соответствующем учете особенностей распространения, проблему синхронизации можно свести к точному определению дальности от станции до спутника и предсказанию дальности на будущее время. Принцип синхронизации: на станции, осуществляющей доступ, поданным предсказанной дальности генерируется пакет, поступающий на спутник в заданный временной интервал. Построение системы МДВУ этого класса непосредственно по описанному принципу потребовало бы, чтобы каждая станция независимо определяла расстояние до спутника. Необходима взаимная синхронизация всех станций с помощью предоставленного канала ретранслятора, используется опорный пакет и соответствующее управление; класс систем с автоматической синхронизацией удалось усовершенствовать настолько, что определение дальности и предсказания оказались не нужными. Связь между способами автоматической синхронизации и способом определения дальности с предсказанием очевидна: главное отличие состоит в том, что в системах определения дальности с предсказанием собирается достаточное количество информации о дальности с целью обеспечения пассивной синхронизации станций относительно спутника, называется также синхронизацией с разомкнутым кольцом. а) Централизованная синхронизация и определение дальности. Производятся лишь необходимые измерения задержек с числом станций, участвующих в измерениях дальностей, не менее трех. Полученная информация предоставляется всем станциям. Каждая станция синхронизируется модулированным синхропакетом, демодулирует данные и использует информацию о собственных координатах для обеспечения точной синхронизации. б) Предсказание орбиты. Представляется возможным предсказание орбиты по последним значениям орбитальных параметров для обеспечения синхронизации с заданной точностью. Пример: система CENSAR (Канада). Центральная управляющая станция передает необходимую информацию о задержках в каналах и скоростях, о временных положениях кадров и информационных символов, о состоянии управления, а также команды управления. Скорость передачи 500 бит/с. Каждая станция измерения дальности передает измерительный пакет в момент времени, задаваемый центральной станцией управления, которая в свою очередь производит измерение полной задержки и соответствующим образом корректирует данные управления. Длительности защитных интервалов могут быть меньше длительности двух символов. 6) Грубая синхронизация. Под действием различных сил ИСЗ (геостационарный) движется в большом объеме пространства, причем движение сопровождается дрейфом со случайными возмущениями. В редких случаях коррекции положения спутнику придают небольшое ускорение. Без слежения за этими возмущениями возможна лишь грубая синхронизация, обеспечивающая точность около 5 мкс; метод неприменим для эффективных систем МДВУ. Но метод используется в военных и морских системах МДВУ. В будущем в системах МДВУ, предназначение только для передачи цифровых потоков информации, можно будет использовать очень длинные кадры порядка 200 мкс. В таких системах даже при использовании грубой синхронизации и больших защитных интервалов кадровая эффективность будет высокой. 3.5.8 Методы вхождения в синхронизм.Вхождение в синхронизм может сочетаться с любым методом синхронизации. Сигналы для вхождения в синхронизм могут иметь высокий или низкий уровень. 1) Случайный доступ. Не защищает от наложений пакетов. Защитные интервалы времени не устанавливаются, и пакеты данных иногда теряются вследствие наложений. При выделении моментов передачи на каждом кадре по случайному закону возможность постоянного пропадания связи сокращается. 2) Обнаружение кодового слова пакета. Для систем подкласса INTELSAT разработано несколько методов, основанных на построении петель с автоматической синхронизацией и точным обнаружением кодовых слов пакетов. Последние представляют собой специальные последовательности символов во вводной части и служат для установления некоторого заданного положения в пакете. На первом этапе станция принимает опорные пакеты кадра и приблизительно определяет моменты передачи. Сигналы вхождения в синхронизм могут иметь простую структуру, направленный переворот фазы несущей малого уровня с частотой следования кадров. Таким образом, достигается правильное расположение корреляционного импульса. Далее, в середине временного интервала, выделенного данной станции, передается лишь вводная часть пакета; ее положение контролируется с помощью приемника. При правильном приеме на каждом кадре кодовых слов пакетов производится перевод пакета на начальный участок предоставленного временного интервала и добавляется информационная часть. Каждый приемник синхронизируется кодовым словом каждого последовательного пакета. При некогерентном приеме (последовательная демодуляция пакета). Эта операция повторяется на каждом кадре без использования априорной информации. В системах когерентного приема пакетов (параллельная демодуляция пакетов) с помощью вспомогательной подсистемы, обрабатывается прошлая информация о синхронизации. Такой тип синхронизации называется “маховое колесо”. 3) m - последовательность. Аппаратура та же, которая используется для синхронизации с помощью m- последовательностей. Эти методы называются также вхождением в синхронизм с низким уровнем. Имеется несколько методов начальной синхронизации местной последовательностью по принимаемой. Для большого и среднего отношения сигнал/шум пригодны способы, основанные на введении принятых символов в генератор последовательности с последующим его запуском. При низком отношении сигнал/шум используются либо методы с поиском, либо комбинированные с поиском, проверкой и подтверждением. В системах с редким вхождением в синхронизм допустимо время вхождения 10 с. После вхождения система работает в режиме активного поддержания синхронизма. 4) Пассивное. Синхронизация с централизованным управлением. Если станция управления и 3 станции измерения дальности синхронизированы, то информации достаточно для синхронизации передатчиков всех станций. Хотя приемники должны быть включены все время, передатчики полностью синхронизируются до начала передачи. Это и есть “пассивная синхронизация”. При небольшой длине кадров экстраполированных данных о дальности достаточно для точной синхронизации по кадрам, пакетам и тактам. 5) Предсказание орбиты. На каждой станции хранятся замеры временных задержек, производившихся через каждые две минуты в течение двух предыдущих дней. Кроме запасенной информации необходимы вычислительные средства. 6) Широкие и узкие импульсы несущей. Используется широкий импульс несущей, за ним следуют узкие импульсы несущей, которые медленно перемещаются по кадру. Все эти импульсы должны быть сигналами малого уровня. Длительность широкого импульса равна длительности нескольких кадров, обнаружение конца этого импульса обеспечивает определение задержки кадра. Узкий импульс должен попасть в узкий временной зазор, тем самым обеспечивается высокая разрешающая способность. Для упрощения оборудования можно производить обнаружение по огибающей. Этот метод применим непосредственно для систем подкласса INTELSAT. При использовании узконаправленных антенн требуется также партнер для возвращения переданных сигналов. |