основы авиации. Основы авиации. ВС и его системы для пилотов РРL. Уральский утц га воздушное судно и его системы (Учебный материал по программе подготовки пилотов (ррl(A))
 Скачать 3.63 Mb. Скачать 3.63 Mb.
|

|
Основные требования к системе управления: углы отклонения рулевых поверхностей должны обеспечивать с некоторым запасом управление самолётом на всех требуемых режимах полёта; усилия управления на командных рычагах должны быть направлены в сторону, противоположную их отклонению, плавно нарастать по мере отклонения и не превышать предельных величин - 500-600 Н (51-52 кгс) в продольном, 300-350 Н (31-36 кгс) в поперечном и 900-1050 Н (92-107 кгс) в путевом управлении; максимальные перемещения командных рычагов должны лежать в строго заданных пределах и ограничиваться регулируемыми упорами; при управлении двумя рулями одним командным рычагом должна обеспечиваться независимость отклонения каждого руля; педали ножного управления должны иметь регулировку по росту пилота; проводка управления должна иметь: минимальные люфты в соединениях; силы трения не более 30-70 Н (3-7 кгс); защиту от повреждения, зажима, попадания на неё посторонних предметов; при деформациях крыла, фюзеляжа, оперения должна исключаться возможность заклинивания проводки управления; должны исключаться резонансные колебания тяг и тросов проводки управления; должно предусматриваться стопорение управления на стоянке. Командные посты ручного управления Ручка управления самолётом (РУС). Продольным движением ручки "вперёд-назад" отклоняется орган продольного управления - руль высоты или управляемый стабилизатор. 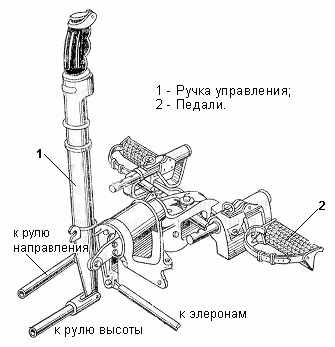 При отклонении ручки вперёд - "от себя", самолёт поворачивается относительно поперечной оси на уменьшение угла атаки крыла, а при движении ручки "на себя" - угол атаки увеличивается. В результате изменения подъёмной силы крыла происходит искривление траектории полёта в ту или иную сторону. Движением ручки вбок лётчик отклоняет элероны и создаёт крен самолёта в сторону движения ручки. Независимость отклонения элеронов и органов продольного управления обеспечивается правильным расположением осей вращения ручки "а-а", "в-в" и тяг управления 1 и 2. 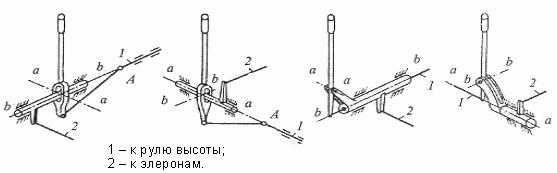 Показанные на этих схемах принципы обеспечения независимости отклонения элеронов и рулей высоты вполне очевидны и не требуют дополнительных пояснений. Ручка управления обычно используется на манёвренных самолётах, обеспечивая простоту и высокую чувствительность управления, что очень важно для таких самолётов. Штурвальная колонка. Отклонением колонки "вперёд-назад" управляют органами продольного управления. Отклонение колонки и движение самолёта согласуется точно так же, как и при управлении ручкой. Поворотом штурвала влево или вправо обеспечивается отклонение элеронов и создаётся крен самолёта в сторону вращения штурвала. 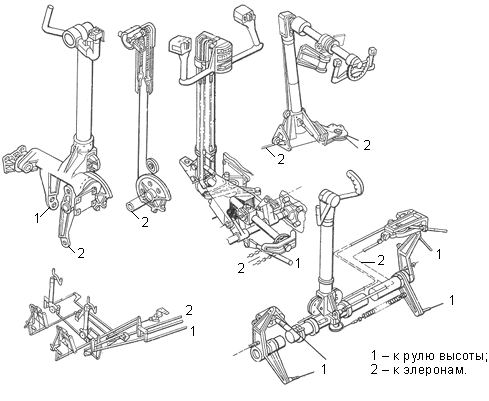 Командные посты ножного управления Посты ножного управления выполняются в виде педалей, закреплённых на горизонтально или вертикально расположенных рычагах. Педали с горизонтальными рычагами закрепляются на рычажно-параллелограммном механизме с вертикальной осью вращения. 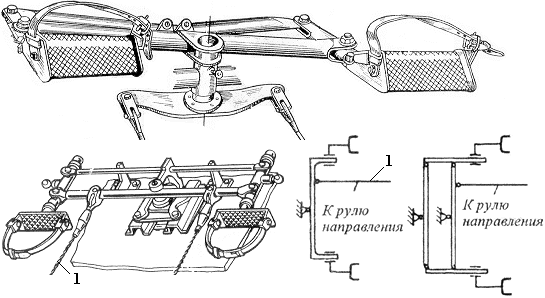 К основному горизонтальному рычагу присоединяется проводка управления 1 руля направления. Параллелограммный механизм обеспечивает поступательное движение педали и ноги лётчика без их разворачивания. Для регулировки по росту подножки педалей переставляются относительно рычажного механизма и стопорятся специальными фиксаторами. Педали с вертикальными рычагами выполняются в виде качающихся рычагов с горизонтальной осью вращения, которая располагается вверху или внизу. 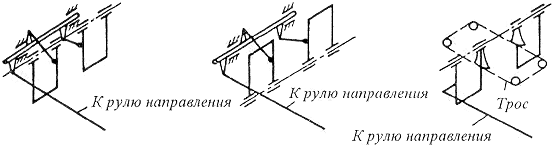 Качающиеся педали с верхним расположением оси подвески закрепляются на опорах 3,12, 15 и поворачиваются относительно оси 7 в вертикальной плоскости. 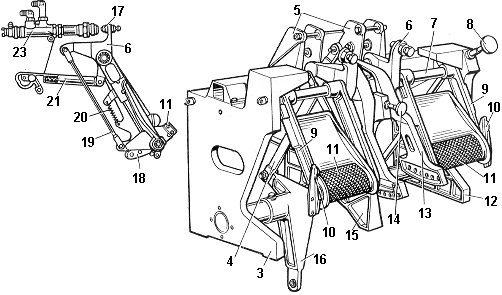 Усилие с педалей 11 тягами 4 передаётся на трехплечую качалку 16 и далее к рулю направления. Качалка 16 обеспечивает движение педалей в разные стороны за счёт того, что тяги 4 от левой и правой педалей присоединяются к качалке 16 по разные стороны от оси её вращения. Каждая педаль при отжатом фиксаторе 10 может переставляться относительно сектора 13, связанного с трехплечей качалкой 16, что обеспечивает регулировку педалей по росту. Нажатием носком ноги на верхнюю часть педали усилие тягой 19 передаётся на тормозной редукционный клапан 23, обеспечивая торможение колёс шасси. На стоянке редукционные клапаны могут фиксироваться в нажатом положении кнопкой 8, обеспечивая стояночное торможение. Качающиеся педали с нижним расположением оси вращения состоят из двух подножек 4, которые установлены на вертикальных рычагах 2, шарнирно закреплённых на кронштейне 12. Каждый рычаг связан тягами 1 с валом 14, к которому присоединяется тяга руля направления 15. Тяги 1 левой и правой педалей присоединяются к валу 14 по разные стороны от его оси вращения, что обеспечивает отклонение педалей в разные стороны. 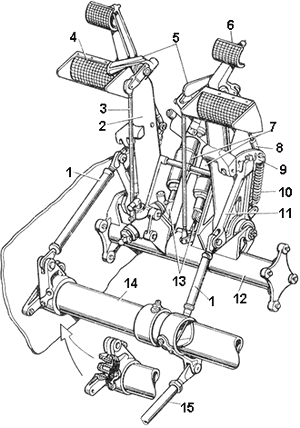 На каждой педали смонтированы тормозные подножки 6, передающие движение к тормозным редукционным клапанам 7. Для регулировки по росту отклонением вбок рукоятки 5 поднимается вверх регулировочная гребёнка 9, связанная с рычагом педали, и штифт кронштейна 11 может переставляться в один из трёх пазов регулировочной гребёнки. При отпускании рукоятки 5 пружина 10 опускает гребёнку вниз и обеспечивает соединение рычага педали с кронштейном 11. Проводка управления Для передачи управляющих сигналов от командных рычагов лётчика к органам управления используется механическая или электрическая проводка управления. Механическая проводка управления В качестве механической проводки управления может использоваться гибкая, жёсткая или смешанная проводка. Гибкая проводка управления Выполняется в виде стальных тросов, которые на прямолинейных участках иногда заменяются металлическими лентами или проволокой. Тросы передают только растягивающую нагрузку, поэтому тросовая проводка состоит из двух ветвей, образующих замкнутую петлю, в которой создаётся предварительное натяжение для уменьшения упругих деформаций при передаче усилий управления. На прямолинейных участках тросы для уменьшения провисания поддерживаются пластмассовыми колодками с направляющими отверстиями (е). 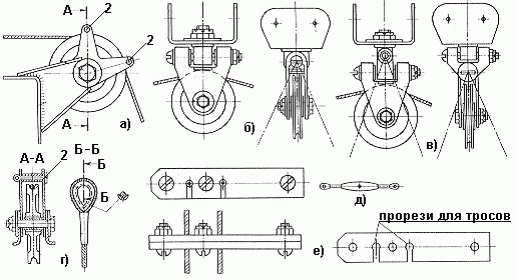 В местах изменения направления троса устанавливаются специальные ролики, снабжённые шарикоподшипниками. Для уменьшения трения и деформаций троса угол охвата ролика тросом должен быть как можно меньше и не превышать 900. Чтобы тросы не соскакивали с роликов на них устанавливаются ограничители 2. Регулировка натяжения тросов обеспечивается тандерами (д) - муфтами с двумя наконечниками, имеющими правую и л 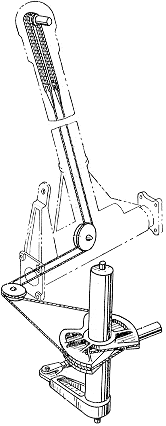 евую резьбу. При вращении муфты происходит изменение натяжения троса. евую резьбу. При вращении муфты происходит изменение натяжения троса. Тросовая проводка обладает малой массой и обеспечивает простоту прокладки её в малых объёмах. Но она обладает и многими существенными недостатками: большое упругое пружинение (упругие люфты) под нагрузкой; вытяжка в процессе эксплуатации, что требует частой регулировки натяжения; большое трение за счёт деформации тросов при огибании роликов; зависимость силы натяжения троса от температуры и др. Из-за этих недостатков тросовая проводка в настоящее время используется редко, обычно на лёгких тихоходных самолётах или в комбинации с жёсткой проводкой в тех местах, где использование последней затруднено. Например, в штурвальной колонке для передачи движения от штурвала к жёсткой проводке за пределами штурвальной колонки. Для компенсации изменения натяжения тросов за счёт их вытяжки или температурных деформаций конструкции в тросовую проводку включаются специальные пружинные регуляторы натяжения. 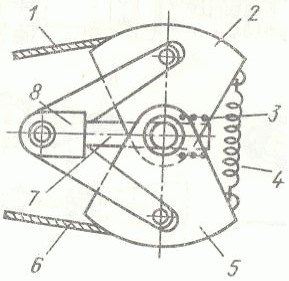 Регулятор состоит из двух секторов 2 и 5, соединённых с тросами.1 и 6, пружин 3 и 4, создающих в тросах натяжение, и механизма запирания секторов 8. Запирание осуществляется торможением центральной штанги 7 из-за её перекоса в направляющих 8 при неодинаковых усилиях в тросах (передача управляющего усилия). При выравнивании усилий тросах перекос штанги 7 устраняется и натяжение тросов обеспечивается пружинами. Жёсткая проводка управления Выполняется из движущихся поступательно жёстких тяг, изготавливаемых из тонкостенных дюралевых, стальных, титановых труб с наконечниками на концах. Наконечники нерегулируемые и регулируемые (для регулировки длины тяги) обеспечивают соединение тяг между собой и присоединение их к качалкам и рычагам проводки управления. Для уменьшения трения все шарниры жёсткой проводки снабжаются шарикоподшипниками. Параллельно всем шарнирам тяги и качалки управления гибкими перемычками 1 соединяются в одну электрическую массу во избежание возникновения между ними разности потенциалов. 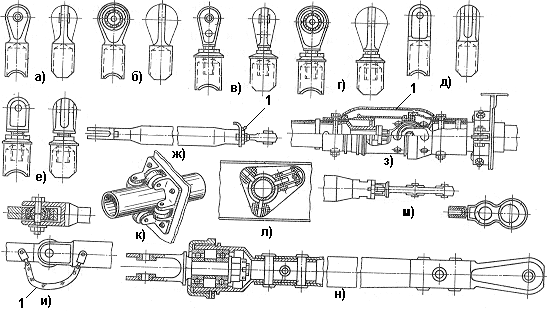 Наконечники тяг ввёртываются непосредственно в резьбу в обжатом конце трубы (ж, м). Прокладка тяг по самолёту выполняется или на поддерживающих качалках, или в роликовых направляющих (к). Для компенсации разницы в деформациях фюзеляжа и жёсткой проводки управления в неё включается специальная компенсационная качалка, поворот которой в ту или иную сторону компенсирует изменение длины проводки и сохраняет заданное положение руля. 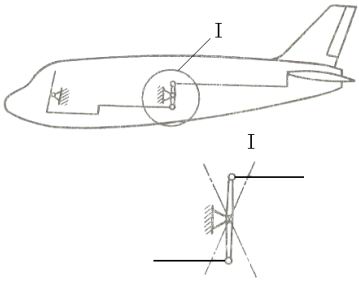 На выходе проводки управления из герметичных кабин устанавливаются специальные гермовыводы, обеспечивающие передачу движения проводки без утечки воздуха из гермоотсека. Уплотнение тяг или вала в этих узлах обеспечивается резиновыми уплотнительными кольцами. 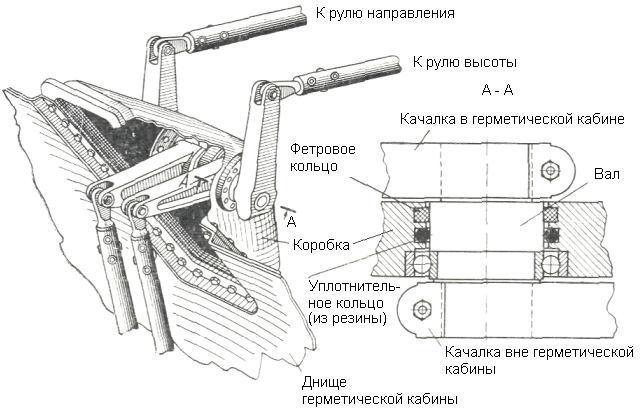 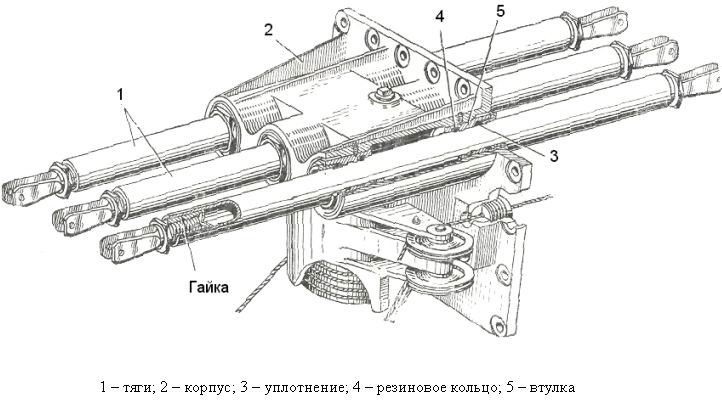 Электрическая проводка управления Передача управляющих сигналов от лётчика к органу управления может обеспечиваться электродистанционной системой управления (ЭДСУ). В такой системе сохраняются обычные командные посты управления или могут использоваться командные рычаги управления уменьшенных размеров - уменьшенная штурвальная колонка, рукоятка на подлокотнике и др. Механические перемещения командных рычагов в этой системе преобразуются в аналоговый или цифровой электросигнал, который передаётся электропроводкой к рулевому приводу, установленному непосредственно у рулевой поверхности и связанному силовым штоком с ее кабанчиком управления. Перемещение силового привода управляется электросигналами командного рычага и за счёт обратной связи создаётся следящая система, в которой руль строго следит за перемещениями командного рычага точно так же, как это происходит в системах с механической проводкой управления. Для повышения надёжности ЭДСУ передача электросигналов происходит по 3-4 независимым каналам, проложенным в разных местах конструкции тех агрегатов, по которым проходит проводка управления. Электродистанционная проводка управления обеспечивает снижение массы системы управления, практически не требует объёмов для её прокладки, проста и удобна в обслуживании. ЭДСУ упрощает включение в систему управления любых автоматических устройств, не требуя установки дополнительных силовых приводов. Это позволяет создавать единую автоматизированную бортовую систему - АБСУ, обеспечивающую высокое качество управления на всех режимах полёта самолёта. В такой системе сигналы лётчика и автоматов суммируются на электрическом уровне и выдаются на единый силовой привод органа управления. Кинематика управления Кинематическая схема системы управления увязывает перемещения командных рычагов с требуемыми углами отклонения рулевых поверхностей. С точки зрения кинематики различают системы симметричного и системы дифференциального управления рулями. Дифференциальное управление Дифференциальное управление позволяет при одинаковых (симметричных) отклонениях командного рычага в обе стороны от нейтрального положения получать разные углы отклонения руля. Такая кинематика отклонения может использоваться в системах поперечного управления, обеспечивая больший угол отклонения элерона вверх по сравнению с углом отклонения вниз. В результате уменьшается возникающий при отклонении элеронов путевой момент, снижающий эффективность поперечного управления. Дифференциальное отклонение может иметь и руль высоты, у которого угол отклонения вверх всегда значительно больше угла отклонения вниз. Простейшим механизмом дифференциального отклонения руля может служить двухплечая качалка, у которой угол между осью рычага и осью тяги отличен от прямого. 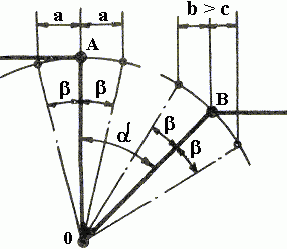 Степень дифференциальности отклонения руля определяется соотношением перемещений точки крепления рулевой тяги (В) в обе стороны от нейтрального положения при симметричном отклонении управляющей тяги лётчика (А). Усилия управления Усилие на командном рычаге управления может быть выражено через шарнирный момент на руле: Pкр = Кш· mш · Sр · bр · q , где Кш = рmax/xрmax - коэффициент передачи от командного рычага к рулю, рmax - максимальный угол отклонения руля в радианах, xрmax - максимальное перемещение командного рычага, mш - коэффициент шарнирного момента руля, Sр - площадь руля, bр - хорда руля, q - скоростной напор. Коэффициент шарнирного момента при малых углах отклонения руля линейно зависит от величины этого угла. Отсюда следует, что в полете усилие на командном рычаге прямо пропорционально углу отклонения руля и величине скоростного напора. 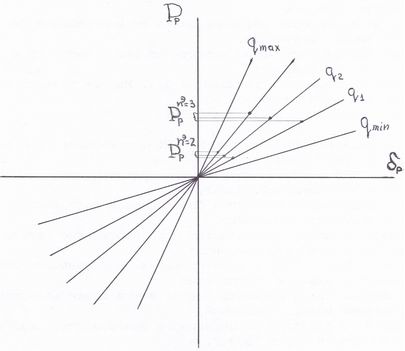 Такая зависимость усилий вполне естественна для лётчика. Она позволяет лётчику по усилию судить о режиме полёта, интенсивности выполняемого манёвра, которая связана с перегрузкой в криволинейном полете. Практически при любом скоростном напоре перегрузка пропорциональна усилию на командном рычаге. Возникающие в полете усилия управления можно разделить на балансировочные и манёвренные. Балансировочные усилия управления действуют в длительном установившемся режиме полёта и обеспечивают уравновешивание (балансировку) самолёта на этом режиме. Такие усилия лишь утомляют лётчика и поэтому от них желательно избавиться. Снятие балансировочных усилий с командных рычагов обеспечивается установкой на рулях триммеров - небольших поверхностей, шарнирно подвешенных в хвостовой части руля, и имеющих дополнительное, обычно электромеханическое, управление от лётчика.  С помощью электрического переключателя лётчик отклоняет триммер в сторону, противоположную отклонению руля и добивается полного уравновешивания шарнирного момента триммером. В результате будет достигнута балансировка самолёта при нулевых усилиях на командных рычагах. В системах управления с необратимым бустером шарнирный момент руля полностью воспринимается этим бустером, а усилия на командных рычагах, в том числе и балансировочные, создаются специальными загрузочными механизмами. В этом случае триммеры на рулях не ставятся, а балансировочные усилия, приходящие от загрузочного механизма, снимаются специальным устройством, включённым в конструкцию загружателя. Манёвренные усилия управления возникают при выполнении самолётом кратковременных манёвров. Эти усилия необходимы лётчику для естественного чувства управления, по ним он судит о поведении самолёта, интенсивности выполняемого манёвра и перегрузке. Манёвренные усилия должны укладываться в строго регламентированные нормы, выработанные длительной лётной практикой. Для больших по размерам самолётов, для самолётов с большой скоростью полёта приходится предусматривать специальные меры по снижению манёвренных усилий. |