Жидкостные ракетные двигатели. В. Г. Попов, Н. Л. Ярославцев К65 Жидкостные
 Скачать 4.57 Mb. Скачать 4.57 Mb.
|

|
Рис.96 Газовые рули А) газовые рули - подвижные элементы управления вектором тяги, постоянно находящиеся в газовом потоке, как правило, на срезе сопла, управляемые с помощью рулевых машинок (РМ). Материал газовых рулей представляет графито-металло-полимерную композицию, получаемую методом порошковой металлургии. Применение газовых рулей для изменения направления вектора тяги обеспечивает достаточно широкий диапазон управляющих воздействий, рис.96. К недостаткам указанной конструкции необходимо отнести:
температур. 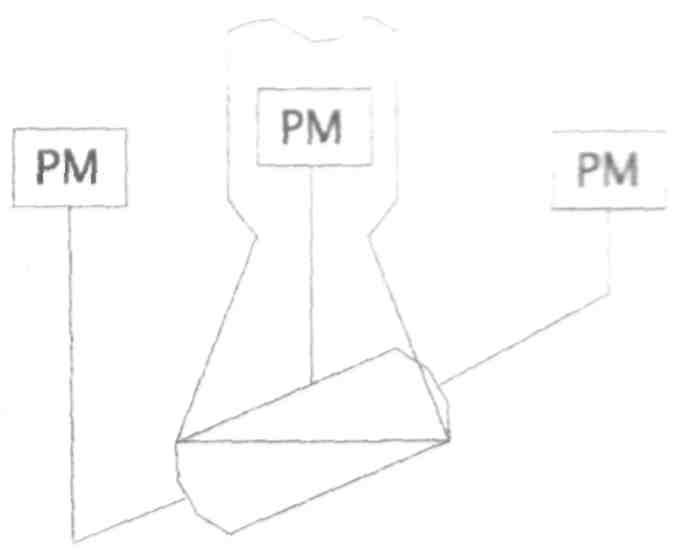 Рис.97 Дефлекторы Б) Дефлекторы - представляют собой насадки конической или цилиндрической формы, устанавливаемые на выходное сечение сопла. Создание управляющего воздействия обеспечивается поворотом насадка, с помощью расположенных под 90 градусов рулевых машин, рис.97. 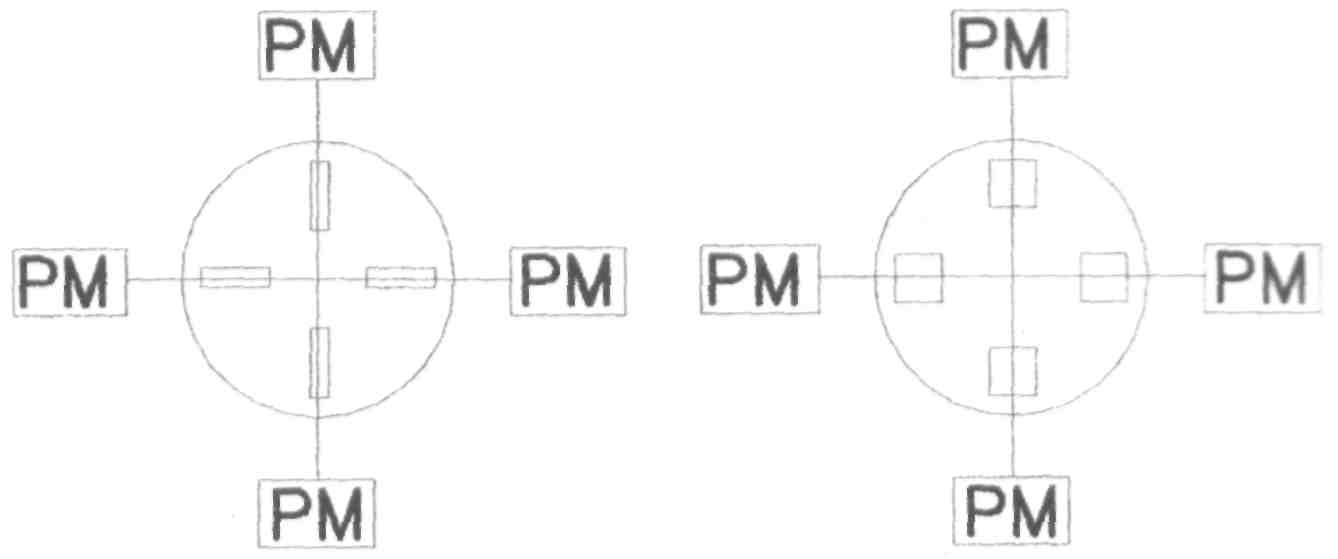 а) Рис.98 Триммеры: а) интерцепторы; б) заслонки б) В) Триммеры Представляют собой наиболее сложную систему обеспечения управляющих воздействий, за счет подвижных элементов. Триммеры- щитки, выдвигаемые в газовый поток на срезе сопла, только в процессе создания управляю- щих воздействий. Если щитки, выдвигаемые в поток, ориентированы своей плоскостью перпендикулярно истекающей струе, то они называются интерцеп-торами, рис.98 а, а если параллельно (вдоль потока) - заслонками, рис.98 б. Камеры, устанавливаемые на шарнирном или карданном подвесе А) шарнирный подвес позволяет отклонять камеру в какой либо одной плоскости. Если двигательная установка состоит из четырех, установленных на шарнирном подвесе камер, то их подвесы могут быть закреплены на общей раме, при этом оси подвесов должны пересекаться в ее центре, рис.99. Такая установка камер позволяет создавать силы и моменты для управления ракетой по углам тангажа, рыскания и крена; например, для управления по крену все четыре камеры должны быть повернуты в одну сторону по окружности. Вид А 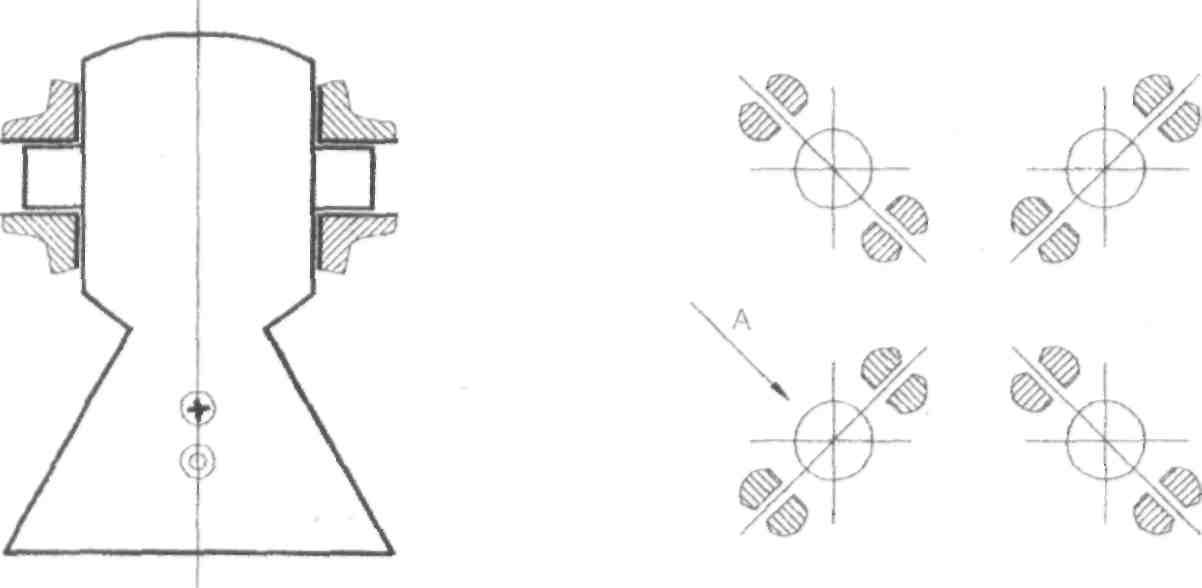 Рис.99 Схема расположения камер четырехкамерного двигателя с их установкой на шарнирном подвесе Б) карданный подвес является более эффективным, но и более сложным. Его применение позволяет отклонять камеру одновременно в двух взаимно перпендикулярных плоскостях, при этом продольная ось камеры может занять любое положение в некотором конусе, рис.100. При карданном подвесе одной камеры достаточно, чтобы управлять по углам тангажа и рыскания. Управление по крену обеспечивается отдельной системой. Если на двигательной установке имеются две камеры, установленные на карданном подвесе, то они обеспечивают управление ракетой по углам рыскания, тангажа и крена. 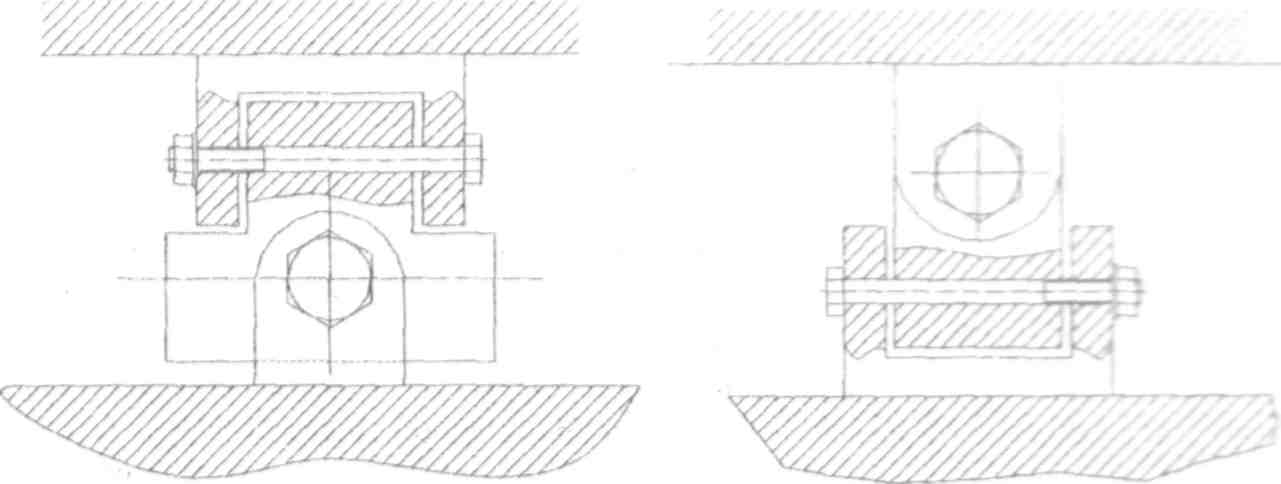 Рис.100 Карданный подвес камеры ЖРД Рулевые двигатели Рулевые, управляющие или верньерные двигатели - это дополнительные двигатели, устанавливаемые на шарнирном или карданном подвесе, как правило, в аэродинамических рулях (стабилизаторах), рис. 101. Рулевые двигатели могут работать как непрерывно, так и в импульсном режиме; подача топлива в рулевые двигатели может осуществляться с помощью основного или вспомогательного ТНА. Рис. 101 Рулевые двигатели Рулевые двигатели усложняют схему и конструкцию двигательной установки, снижая в некоторой степени ее надежность. 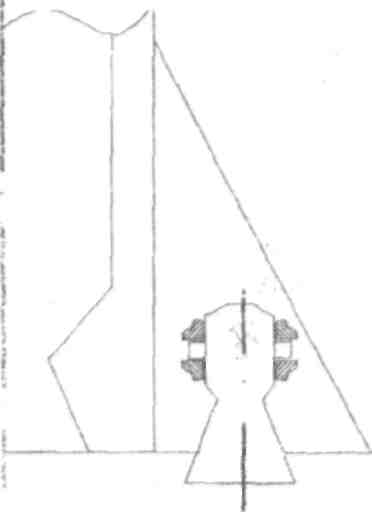 163 Поворотные сопла В конструкдии ЖРД без дожигания генераторного газа для создания управляющих воздействий, могут быть использованы поворотные сопла, рабочим телом для которых является генераторный газ, отбираемый от турбины. Возможны следующие варианты таких сопел.
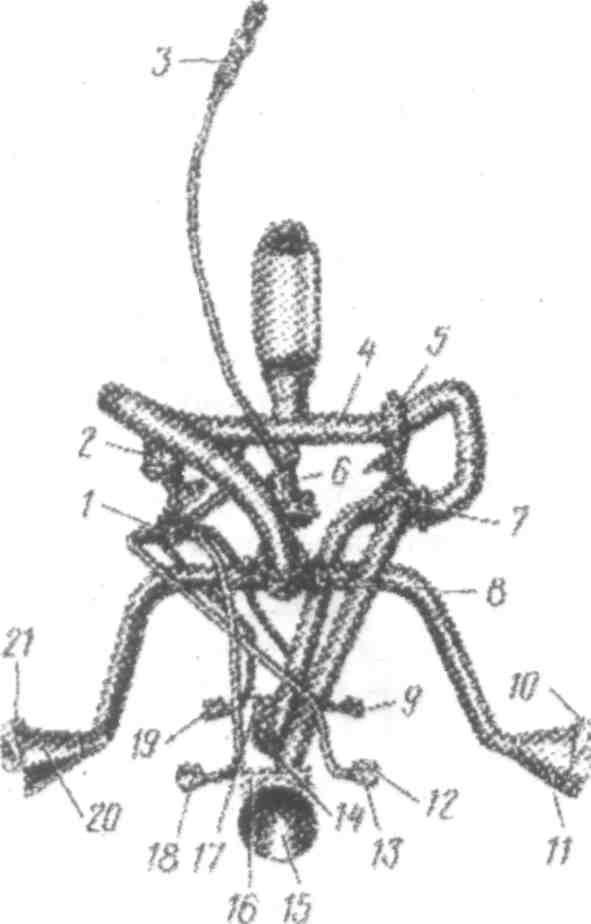 Рис.102 Рулевая система двигателя РД- 119: 1 - газораспределитель крена, 2, 5, 6 -электроприводы; 3 - пироклапан; 4 - выхлопной трубопровод; 7 - газораспределитель рыскания; 8 - газораспределитель тангажа; 9, 11, 13, 14, 15, 18, 19,20-сопла; 10, 12,16,17,21 - кронштейны Впрыск жидкости или вдув газа в расширяющуюся часть сопла Для создания сравнительно небольших управляющих воздействий и сил можно вводить рабочее тело в расширяющуюся часть сопла через отверстия (сопла), расположенные в стенке сопла, рис.103. Четырехсопел достаточно, чтобы создавать боковые управляющие силы по тангажу и рысканию. Сопла каждого квадранта вступают в работу после открытия клапана установ-ленного на трубопроводе, который подводит жидкость или газ. При вводе рабочего тела через сопло газ или пары жидкости поступают в поток продуктов сгорания. На участке сопла перед местом ввода рабочего тела обеспечивается торможение части потока, устанавливается фронт косого скачка и образуется зона повышенного давления. В результате этого истекающая струя продуктов сгорания отклоняется от осевого направления и возникает боковая сила, направленная в сторону сопла, через которое вводится рабочее тело. В качестве газообразного рабочего тела могут быть использованы: газы (азот, аргон, гелий и т.д.), обеспечивающие предварительный наддув баков с основными компонентами топлива; генераторный газ; продукты сгорания, перепускаемые из камеры сгорания или сажающейся части сопла.  Рис.103 Газодинамическая система управляющих моментов и сил Изменение величины тяги отдельных камер многокамерного двигателя Если изменить величину тяги жестко закрепленных диаметрально расположенных двигателей, входящих в состав двигательной установки, то можно создать управляющий момент относительно центра масс ракеты и обеспечить ее разворот в плоскостях тангажа и рыскания. 9.6. Система регулирования величины вектора тяги ЖРД Величина тяги ЖРД определяется расходом топлива в камеру. Расход, а, следовательно, и тягу можно изменять варьируя: а) при вытеснительной подаче - давление в баках компонентов топли ва; б) при насосной подаче - частоту вращения вала ТНА; в) при вытеснительной и насосной подаче - регуляторами расхода, ус танавливаемыми на магистралях перед камерой (для вытеснительной подачи) и управляемыми приводами. Основными условиями обеспечения устойчивого и плавного горения при снижении тяги двигателя являются одновременное сохранение перепада давления на форсунках и давления продуктов сгорания в камере. Условие поддержания постоянства перепада давления на форсунках при работе двигателя с изменяющейся тягой осуществляется варьированием: числа форсунок, через которые компоненты топлива впрыскиваются в камеру сгорания; площади проходного сечения форсунки: плотности компонентов топлива (путем их насыщения газом); коэффициента соотношения компонентов топлива km. Если различная величина тяги ЖРД с насосной системой подачи обеспечивается изменением частоты вращения насосов компонентов топлива, то турбина ТНА должна иметь систему, управляющую её мощностью. Нашли применение температурный, расходный и смешанный способы изменения мощности турбины ТНА. Температурный способ применяется для двухкомпонентных ЖГТ; он состоит в изменении температуры генераторного газа, подаваемого на турбину, для чего на одной из магистралей питания газогенератора устанавливают регу лятор расхода с электро - или гидроприводом, позволяющим увеличивать или уменьшать расход одного из компонентов в ЖГГ, а, следовательно, и коэффи циент соотношения km для газогенератора. Расходный способ состоит в изменении расхода газа через турбину при поддержании его постоянной температуры, что обеспечивается постановкой на подающих магистралях ЖГТ регуляторов расхода со специальными стабилизаторами, поддерживающими неизменным величину km. При смешанном способе изменения мощности турбины одновременно изменяются и турбина и расход газа, подаваемого в камеру. 9.7. Основные направления совершенствования ЖРД 1. Применение перспективных жидких ракетных топлив. а) повышение плотности компонентов (жидкий кислород и водород в «шугообразном» состоянии; кислород и водород в состоянии, соответствующем их тройной точке; углеводородные горючие из отходов и побочных продуктов нефтехимического производства); б) повышение энергетических характеристик теплив (использование топлив на основе фтора, металлосодержащих горючих, трехкомпонентных топлив). 2. Разработка новых схем ЖРД и ДУ. А) ЖРД с кольцевой камерой и соплом с центральным тел б) двухтопливные ЖРД (один окислитель и два горючих, последова тельно подаваемые в камеру ЖРД, например, « (О2)ж + керосин » и « (О2)ж + (Н2)ж>>); в) ЖРД линейной конструкции, в которых камера и сопло имеют пря моугольное сечение. 3. Уменьшение габаритных размеров. А) переход на повышенные значения давления в камере; б) использование рациональных компоновок двигателя; в) усовершенствование конструкции агрегатов (использование камер с центральным телом и т.д.). 4. Снижение массы ДУ. а) использование конструкционных и композиционных материалов по вышенной прочности; б) использование передовых технологий производства; в) интенсификация методов охлаждения камеры сгорания.
ДУ. а) обеспечение эксплуатационной технологичности конструкции: б) резервирование работы наиболее ответственных агрегатов; в) испытание материалов, систем и агрегатов с имитацией эксплуата ционных условий; в) использование перспективных стратегий технического обслуживания и ремонта. 7. Снижение стоимости и времени конструкторско-технологической стадии создания ДУ а) унификация основных узлов и агрегатов; б) разработка систем, обеспечивающих спуск нижних ступеней раке тоносителей. Литература
ОГЛАВЛЕНИЕ 1. Принцип работы реактивного двигателя. Основные понятия и определения .........
2. Формула Циолковского и её практическое применение 10
3. Рабочий процесс в химических ракетных двигателях 13
4 Характеристики ракетного двигателя 20
4.4. Влияние высотности сопла на протекание высотной характеристики 25 5. Общие сведения о ЖРД 26
6. Основные конструктивные элементы камер ЖРД. Топливные баки 45
6.10. Кольцевые сопла 73  б.11. Требования, предъявляемые к распиливающему устройству б.11. Требования, предъявляемые к распиливающему устройствуЖРД 75 6.12. Типы топливных форсунок 78 6.13. Способы размещения топливных форсунок на плоских головках камеры ЖРД 86 6.14. Назначение, схемы и конструктивные особенности топливных баков 88 7. Система охлаждения камер ЖРД 91
камеры ЖРД 93 7.3. Классификация систем охлаждения ЖРД. Внешнее охлаждение 94 7.3. Требования, предъявляемые к внешнему (наружному) охлаждению 95
8. Система подачи компонентов топлив 104 8.1. Турбонасосная система (ТНС) подачи компонентов топлива 104
9. Системы управления ЖРД 145
9.7. Основные направления совершенствования ЖРД 166 Литература 168  В. Г. Попов H.Л Ярославцев В. Г. Попов H.Л ЯрославцевЖИДКОСТНЫЕ РАКЕТНЫЕ ДВИГАТЕЛИ Под редакцией Н.Л. Ярославцева Лицензия ЛР 20447 от 17.04.97 |