тер мех 25 вариант. В виде плоского многозвенного механизма изображена на рисунке 5 в масштабе 1 10
 Скачать 0.76 Mb. Скачать 0.76 Mb.
|

|
Постановка задачи. Механическая система в виде плоского многозвенного механизма изображена на рисунке 5 в масштабе 1:10. Механизм состоит из шести подвижных звеньев различной формы, установленных в неподвижном цилиндрическом корпусе. В точках А, В, К, М соответствующие звенья соединены между собой шарнирами. Два колеса с неподвижными осями вращения О1 и О2 кинематически связаны между собой намотанной на них нитью. Третье колесо катится по неподвижной цилиндрической поверхности корпуса без проскальзывания, при этом его подвижная ось В движется по дуге окружности радиусом СВ. Ползун перемещается по криволинейной направляющей корпуса так, что его точка М движется по дуге окружности радиусом СМ. Ведущее колесо механизма вращается вокруг неподвижной оси О1, перпендикулярной плоскости рисунка с постоянным угловым ускорением ε1, . имея в указанном на рисунке положение угловую скорость ω1. Дано: ω1 3 с-1, ε1 5 с-2, положительное направление отсчета угла поворота φ1 ведущего колеса – против хода часовой стрелки. Требуется: Определить для заданного положения механизма скорости точек А, В, D, Е, К, М и угловые скорости звеньев механизма с помо- щью мгновенных центров скоростей; Определить для заданного положения механизма аналити- ческим методом ускорения точек А, В, D и угловое ускорение звена ABD. Определение скоростей точек и угловых скоростей звеньев По заданной отрицательной величине угловой скорости ω1 с учетом принятого положительного направления отсчета угла φ1 уста-навливаем, что ведущее колесо вращается вокруг неподвижной осиО1 по часовой стрелке. Поэтому на кинематической схеме механизма изображаем угловую скорость го направления (рис.6). ω1 дуговой стрелкой соответствующе- 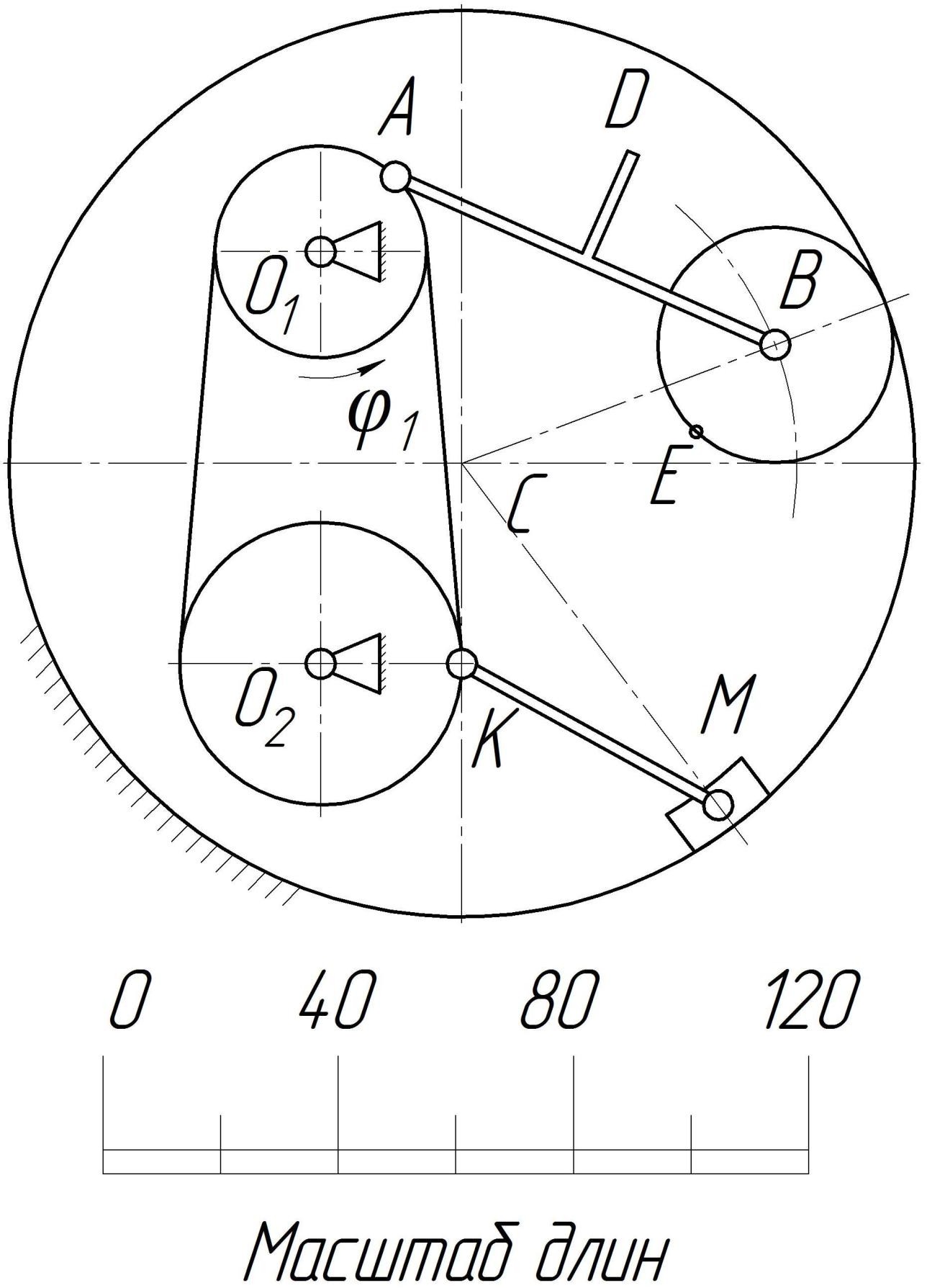 Рис. 5. Вариант плоского многозвенного механизма 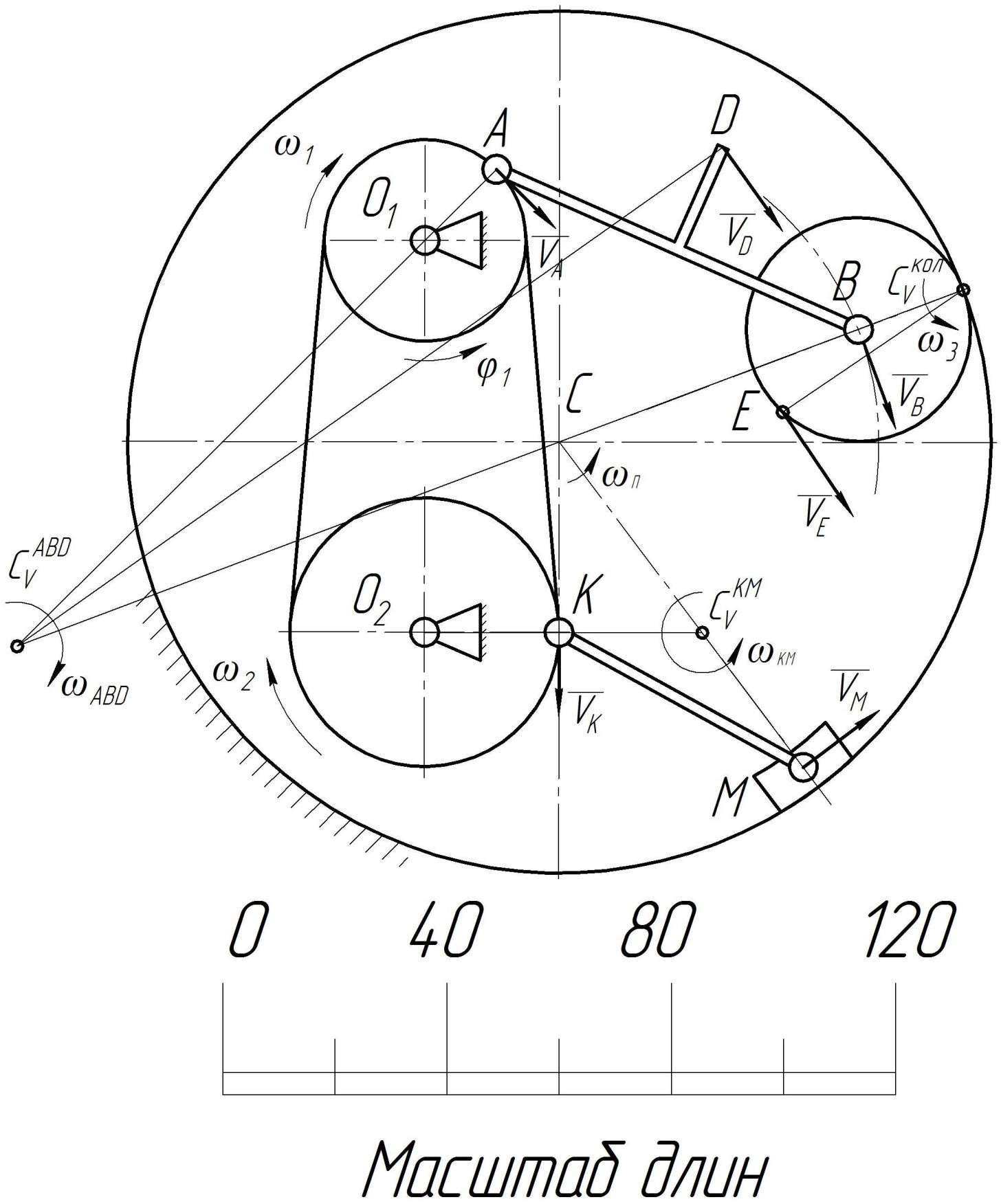 Рис. 6. К определению скоростей точек и угловых скоростей звеньев механизма Зная величину и направление угловой скорости ω1 находим ве- личину и направление скорости точки А на ободе ведущего колеса. Радиус окружности О1А по которой движется точка А измеряем с точ- ностью до 1 мм на кинематической схеме механизма (рис. 6) О1А = 18 мм. С учетом масштаба 1:10 истинный размер О1А = 18 см = 0,18 м. Отрицательный знак угловой скорости ω1 уже учтен при определении направления ω1, поэтому вычисляем модуль скорости точки А: VA ω1 O1A 3 0,18 0,54 м/с, но вектор VA направляем перпендикулярно радиусу О1А в сторону, соответствующую направлению ω1. C Кроме ведущего колеса точка А принадлежит ещё звену ABD, совершающему плоскопараллельное движение. В заданном положе- нии механизма (в данный момент времени) движение звена ABD можно представить как мгновенно вращательное вокруг оси, прохо- дящей через мгновенный центр скоростей ABD V этого звена перпен- дикулярно плоскости рисунка. Для определения положения точки C ABD V необходимо знать кроме направления вектора VA ещё линию, вдоль которой направлен вектор скорости другой точки звена ABD. Точка B звена ABD принадлежит ещё и третьему колесу, которое ка- тится по неподвижной цилиндрической поверхности корпуса. Поэто- му траекторией точки В является окружность радиусом СВ. Тогда вектор скорости точки В должен быть направлен по касательной к этой окружности, то есть перпендикулярно радиусу СВ. Находим положение мгновенного центра скоростей звена ABD. Для этого из точки А проводим перпендикуляр к вектору VA и из точ- ки В перпендикуляр к линии, вдоль которой направлен вектор скоро- сти точки В. На пересечении этих перпендикуляров находим точку V C ABD– мгновенный центр скоростей звена ABD. C скорость звена ωABDпри его повороте вокруг оси ABD V по часовой стрелке. Вектор скорости точки В VB направляем уже в соответствии с направлением ωABD . Замеряем на схеме (рис. 6) расстояние от точки C А до мгновенного центра скоростей ABD V (мгновенный радиус) с уче- том масштаба AC ABD 120 см = 1,2 м и находим величину угловой V скорости звена ABD: ω VA 0,54 0,45 с-1. V ABD ACABD 1,2 C Соединяем точку D с мгновенным центром скоростей ABD V и направляем вектор скорости VD из точки D перпендикулярно мгно- V венному радиусу DC ABD в сторону, соответствующую направлению ωABD . Замеряем мгновенные радиусы BC ABD 160 см = 1,6 м, V V DC ABD 154 см=1,54 м и находим величины скоростей точек В и D, пропорциональные этим расстояниям: V VB ωABD BC ABD 0,45 1,6 0,72 V VD ωABD DCABD 0,45 1,54 0,69 м/с; м/с. Третье колесо с подвижной осью В совершает плоскопараллель- ное движение. Мгновенный центр скоростей колеса кол C V находится в точке касания его с неподвижной поверхностью корпуса, так как из условия колесо катится по этой поверхности без проскальзывания. Учитывая свойства мгновенного центра скоростей записываем соот- ношение между скоростями точек В, Е и угловой скоростью колеса: ω3 VB V BCкол VE . V ECкол V BCкол 20 см = 0,2 м, ECкол 38 см = 0,38 м и находим величины V V скорости точки Е и угловой скорости третьего колеса: V VE VB ECкол BCкол 0,72 0,38 0,2 1,37 м/с; ω3 VB V BCкол 0,72 0,2 3,6 с-1. В соответствии с известным направлением вектора скорости VB направляем угловую скорость колеса против хода часовой стрелки, а вектор скорости VE – перпендикулярно мгновенному радиусу ЕСV уже в соответствии с направлением ω3 . Так как проскальзывание между нитью и ободами первого и второго колес отсутствует, то точки на ободах колес, как и все точки нити, имеют одинаковые по величине скорости, следовательно: VK VA 0.54 м/с. Угловые скорости колес ω1 и ω2 совпадают по направлению, поэтому вектор скорости точки К VK направляем перпендикулярно радиусу О2К в соответствии с направлением угловой скорости ω2 второго колеса, которому точка К принадлежит. С учетом масштаба замеряем О2К = 2,4 см = 0,24 м и находим: ω2 VK O2K 0,54 0,24 2,25 с-1. Вектор скорости точки МVM направляем перпендикулярно ра- С диусу СМ окружности, по которой движется точка вместе с ползуном. Мгновенный центр скоростей KM звена КМ находим на пересече- V нии перпендикуляров, восстановленных из точек К и М к векторам их С скоростей. Угловую скорость ωKM звена КМ при его мгновенном по- вороте вокруг оси KM направляем против часовой стрелки в соот- V ветствие с направлением вектора VK , а вектор VМ , перпендикуляр- ный радиусу СМ и мгновенному радиусу МС KM, – в сторону, соот- V V ветствующую направлению ωKM . Замеряем с учетом масштаба KCKM 26 см = 0,26 м, V MCKM тельно: 30 см = 0,3 м, СМ = 73 см = 0,73 м. Вычисляем последова- ω VK 0,54 2,01 с-1; V KM KCKM V 0,26 VМ ωKM MCKM 2,01 0,3 0,6 м/с; и угловую скорость ползуна: VM ωП CM 0,6 0,73 0.82 с-1. Определение ускорений точек и углового ускорения звена ABD Вновь строим кинематическую схему механизма в заданном по- ложении в масштабе 1:10 (рис. 7). В соответствии с принятым поло- жительным направлением отсчета угла поворота φ1 и положительным знаком заданной величины углового ускорения ведущего колеса на- правляем ε1 против хода часовой стрелки. Ускорение точки А на ободе ведущего колеса находим по фор- муле сложения ускорений при вращательном движении тела: A A W WA W τ Wn. (6) Вектор τ тангенциальной (касательной) составляющей абсо- A лютного ускорения точки А направляем перпендикулярно радиусу окружности О1А, по которой движется точка А, в соответствие с на- правлением углового ускорения ε1. Величину тангенциальной состав- ляющей ускорения точки А находим по формуле: W τ ε O A 5 0,18 0,9 м/с2. W A 1 1 Вектор n нормальной составляющей ускорения точки А на- A правляем по радиусу окружности от точки А к оси вращения, а мо- дуль этой составляющей ускорения: W n ω2 O A 32 0,18 1,62 м/с2. A 1 1    Находим модуль абсолютного ускорения точки А: Находим модуль абсолютного ускорения точки А:WA 1,85 м/с2. Приступаем к определению ускорения точки В звена ABD, тра- ектория которой известна, в отличие от траектории точки D. Выбира- ем за полюс точку А и записываем для точки В векторную формулу сложения ускорений при плоскопараллельном движении звена ABD: WB WAWBA. (7) 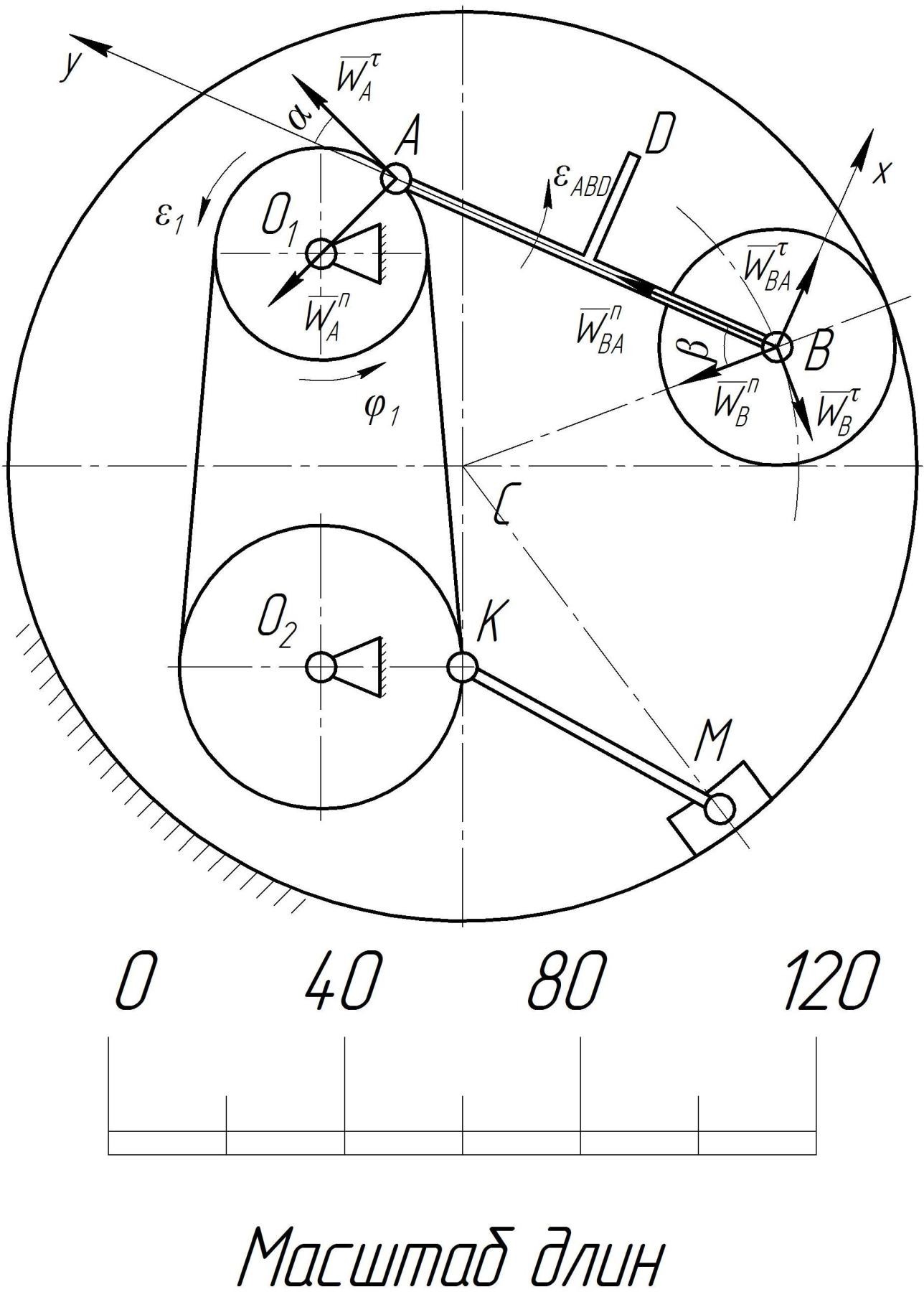 Рис. 7. К определению ускорений точек А и В и углового ускорения звена Аналитическое определение ускорения точки В сводится к по- следовательному проектированию векторного равенства (7) на оси х, у условно неподвижной системы отсчета. Для этого сначала определяем направления всех входящих в ра- венство векторов ускорений или их составляющих. Кроме звена ABD точка В находится на оси колеса, которое катится по цилиндрической поверхности неподвижного корпуса. Поэтому траекторией точки В является окружность радиусом СВ и, как следствие: W B B WB W τ Wn. (8) Вектор тангенциальной составляющей ускорения точки В τ B при движении точки по окружности направляем перпендикулярно ра- диусу СВв любую сторону. Вектор нормальной составляющей n W B направляем по радиусу из точки В к точке С. Вектор ускорения точки В при вращении вокруг условно непод- вижного полюса А, также раскладываем на составляющие: BA W BA WBA Wτ n (9) Вектор тангенциальной составляющей W τ направляем из точки BA В перпендикулярно АВ в любую сторону, так как направление углово- го ускорения звена ABD ε ABD пока неизвестно. Вектор нормальной составляющей W n направляем по АВ от точки В к полюсу А. BA Подставляя (6), (8) и (9) в (7) получаем векторное равенство: W τ W n W τ W nW τ Wn (10) B B A A BA BA где направления всех составляющих векторов известны. Выбираем оси х, у условно неподвижной системы отсчета и после последова- тельного проектирования векторного равенства (10) на эти оси полу- чаем два скалярных уравнения, в которых известны лишь величины A A W τ и W n: W cos Wnsin W sin Wncos W ; (11) В В А А ВА W sin Wncos W cos Wnsin Wn. (12) В В А А ВА Так как уравнения (11), (12) позволяют найти только две неиз- вестные величины, поэтому предварительно находим величины нор- мальных составляющих ускорений n n W и W B BA , с учетом найденных в предыдущем пункте VB 0,72 м/с и ωABD 0,45 с-1: n V2 0,722 2 WB B OB 0,57 0,91 м/с ; ω W n 2 BA ABD AB 0,452 0,7 0,14 м/с2. Замеряем на схеме механизма (рис. 7) необходимые линейные и угловые размеры AB = 70 см = 0,7 м; OB = 57 см = 0,57 м; α = 22˚; β=45˚, находим sinα=0,37; cosα=0,93; sinβ=0,71; cosβ=0,71 и остав- шиеся неизвестные величины тангенциальных составляющих ускоре- ний. Из уравнения (12): τ B B A BA W W ncosβ W τ cos α W nsin α W n B sin β 0,91 0,71 0,9 0,93 1,62 0,37 0,14 0,71 1,31 м/с2; из уравнения (11) Wτ Wτ cosβ Wnsinβ Wτ sin α Wncos α BA B B A A (1,31) 0,71 0,91 0,71 0,9 0,37 1,62 0,93 1,46 м/с2; Знаки величин τ τ W и W B BA свидетельствуют о том, что на рис. 7 показано истинное направление вектора τ и направление вектора BA B W W τ противоположное действительному.  Модуль абсолютного ускорения точки В: Модуль абсолютного ускорения точки В: WB WB 1,24 м/с2. Учитывая, вместе с тем, известную зависимость W τ ε ABD AB BA находим угловое ускорение звена ABD: W τ ε ABD BA AB 1,46 0,7 2,09 с-2. Направляем угловое ускорение ε ABD против хода часовой BA стрелки в соответствие с направлением вектора W τ . |