Термех. термех. 1 Векторное исчисление Вектор и его модуль
 Скачать 2.59 Mb. Скачать 2.59 Mb.
|

|
(1)Векторное исчисление 1.Вектор и его модуль. Вектор-есть направленный отрезок. Произвольные вектора обозначим 2.Проекция вектора и знаки проекций. Выберем некоторое неподвижное начало отчета 0 и введем декартовую систему координат с осями ох,оy,oz. Отложим произвольный вектор из начала координат.Определим проекции вектора Модуль вектора через его проекции выражается по т. Пифагора формулой 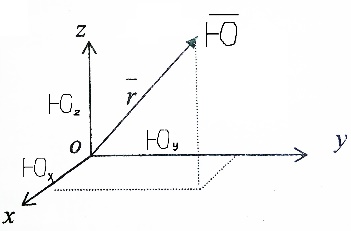 Проекция вектора на ось считается положительной, если координата конца вектора больше координаты его начала. Вектор не зависит ни от системы координат,след-но и ни он его модуля , направление также не зависит от системы отсчета. Это св-во векторов называется инвариантностью(независимостью) вектора относительно преобразования системы координат 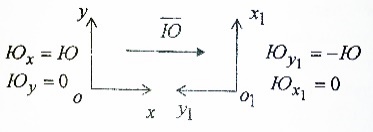 3.Умножение вектора на скаляр. В результате умножения вектора 4.Составляющие вектора Если вектор имеет модуль, равный единице,то он называется единичным вектором. Модули единичных векторов являются безразмерными величинами ,а их направления совпадают с направлением координатных осей. Такие векторы наз-ся единичными векторами координатных осей, или ортами осей.В декартовой системе отры принято обозначать 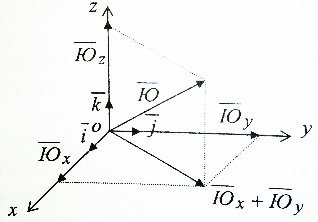 Составляющая вектора 5.Правые и левые системы координат. В математических расчетах используются так называемые правые и левые системы декартовых координат,которые отличаются взаимным расположением координатных осей.Правило правого винта(для правых систем координат) Вначале отложим сомножители из одной точки. Далее совместим плоскость головки винта с плоскостью векторов Ю(ox) и Я(oy), и правой рукой будем завинчивать винт с правой резьбой по кратчайшему расстоянию от первого сомножителя ко второму. Направление завинчивания совпадает с направлением вектора Э(oz). В левых системах координат вводится правило левого винта. Всякое вращение против хода часовой стрелки в теоретической механике считается положительным. 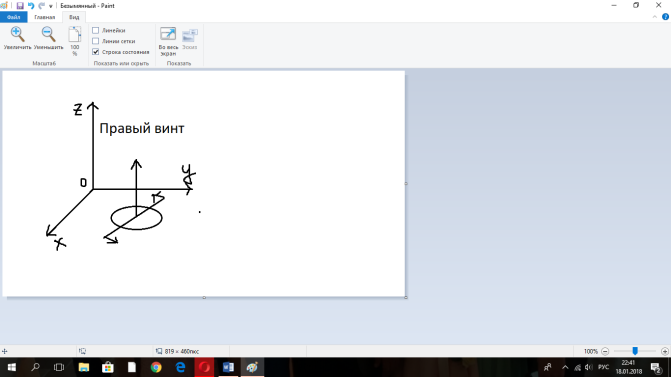 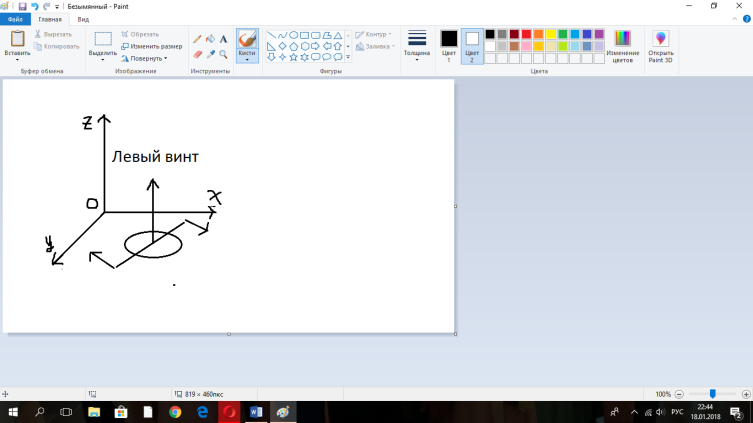 6.Векторное произведение двух векторов. В результате векторного умножения двух векторов получается векторЭ=ЮхЯ , определяемый двумя способами – аналитическим и геометрическим. При аналитическом способе вектор Э находится по проекциям на оси координат согласно формулам: Эx =ЮyЯz -ЮzЯy , Эy =ЮzЯx -ЮxЯz , Эz =ЮxЯy -ЮyЯx. 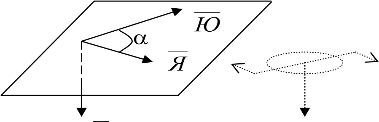 При геометрическом способе вектор Э строится перпендикулярно плоскости, проведенной через сомножители Ю иЯв соответствии с правилом правого винта Его модуль вычисляется по формуле Э=ЮЯ sina. Здесь a- угол между векторами Ю и Я . 7.Скалярное произведение двух векторов. В результате скалярного умножения двух векторов получается скаляр Э=Ю Здесь a- угол между векторами Ю и Я . 8. Переменный вектор. Если записано Ю=Ю(t), то это означает, что с изменением параметра t меняется или модуль, или направление вектора 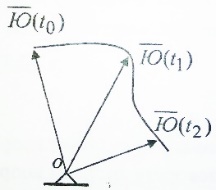 9.Производная от вектора. Пусть ∆ Последняя формула получена после дифференцирования (2)Векторный способ задания закона движения точки 1.Радиус-вектором и траектория движущейся точки  (рассмотрим неподвижную систему отсчета с центром о и движущуюся точку b) Радиус-вектором точкиbназывается вектор 2.Определение скорости точки. 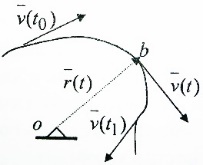 Скорость точки b будем называть вектор Проинтегрировав обе части формулы получим закон движения точки: 3.Определение ускорения точки 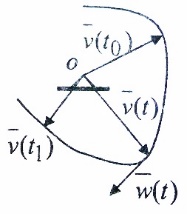 Ускорением движущейся точки b назовем вектор Вектор Проинтегрировав обе части по времени формулы получим: Отсюда следует, что: (3)Координатный способ задания закона движения точки 1.Закон движения и траектория точки Закон движенияопределяется соотношениями:xb= x(t), yb= y(t), zb= z(t). Здесь x(t), y(t), z(t) -координаты движущейся точки b…xb,yb,zb-координаты точки b определяющиеся длиной соответствующих отрезков на осях координат. Для определения уравнения траектории в явном виде надо из закона движения исключить время t . ..В случае когда точка b движется в плоскости oxy,для определения закона движения достаточно задать две ее координаты xb=x(t), yb=y(t) исключив из них время t, получим одно соотношение F(x,y)=0,которое и является уравнением траектории точки. 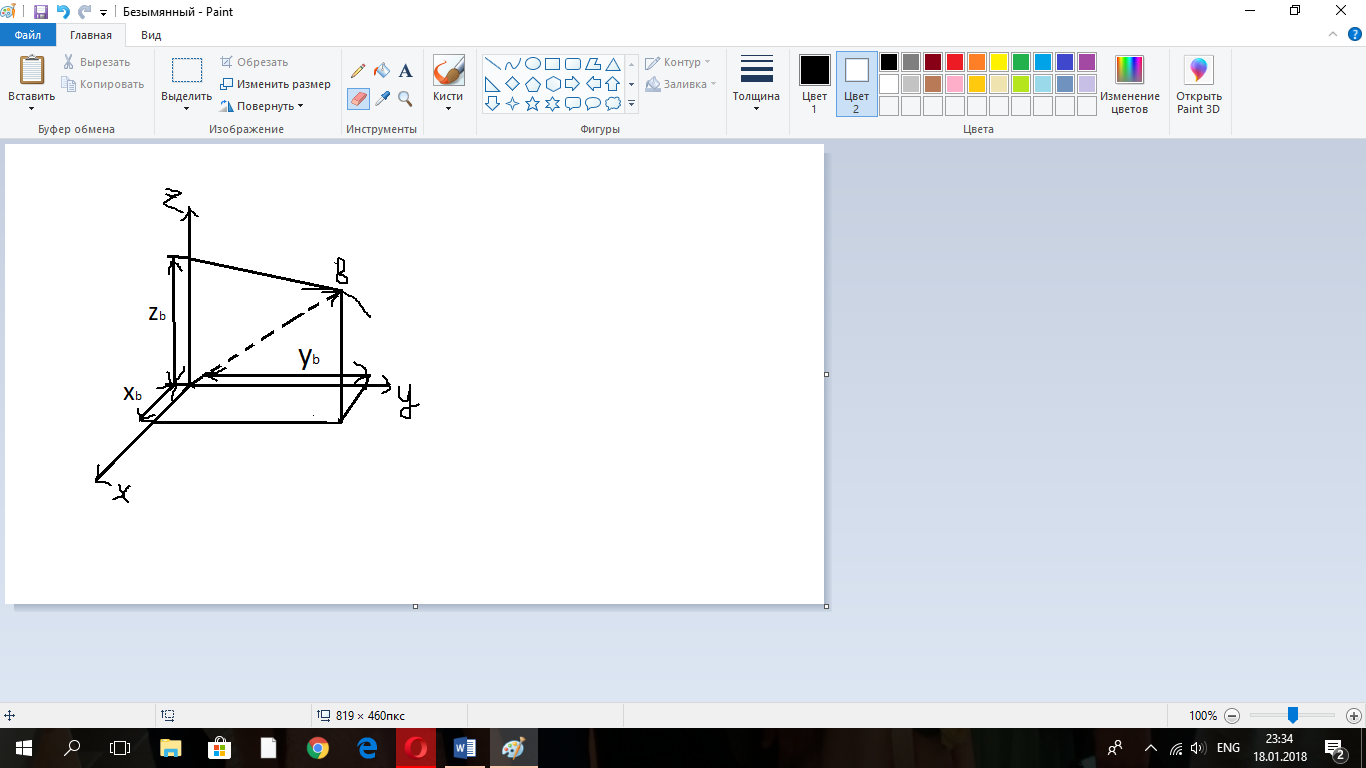 2.Определение скорости и ускорения точки Задание закона движения позволяет вычислить вектор скорости движущейся точки аналитическим способом т е по проекциям на оси координат.следует проекция радиус вектора (4)Естественный способ задания закона движения точки. 1.Естественная система координат. Пусть т.b движется по известной траектории. При этом говорится ,что точкадвижется по прямой , окружности и т.д. На траектории выбирается некоторая фиксированная т. и задается длина дуги s, отсекаемая т.b, как ф-ия времени.Кроме этого, указывается положительное направление отсчета длины дуги.Если ф-ия s = s(t) известна, то вычислив ее значение,в любой момент времени может определить положение т.b в пространстве. Следовательно , s = s(t) задан закон движения т. , и способ задания в этом случае наз-ся естественным. 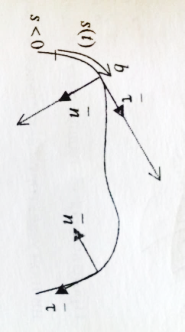 Определим естественную систему координат. Ее начало отсчета поместим в движущуюся т. b. Первую ось с ортом Единичные векторы 2.Определение скорости и ускорения точки. Пусть закон движения точки b задан естественным способом в форме (s = s(t)). Ее радиус-вектор будем считать сложной функцией времени, полагая, что 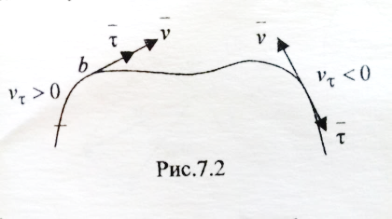 Мех. Смысл производной vτ= Вектор ускорения раскладывается на две составляющие, параллельной касательной и главной нормали к траектории точки 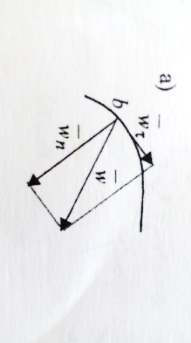 \ (5)Поступательное движение твердого тела. Движение тела называется поступательным, если любая прямая, проведенная в теле, движется параллельно самой себе. Доска движется не прямолинейно, но поступательно. |