Термех. термех. 1 Векторное исчисление Вектор и его модуль
 Скачать 2.59 Mb. Скачать 2.59 Mb.
|

3.Уравнение равновесия сходящейся системы сил.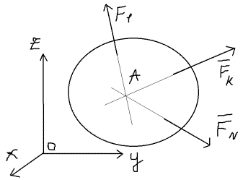 Главный момент внешних сил Для равновесия сходящейся системы сил необходимо и достаточно, чтобы суммы проекций всех сил на оси координат были равны нулю. 4.Уравнения равновесия плоской системы сил. Система сил, действующих на твердое тело, называется плоской, если все силы находятся в некоторой неподвижной плоскости oxy . Уравнения равновесия плоской системы сил можно записать в трех следующих формах: Здесь ось ox не должна быть перпендикулярна прямой оА. (22)Допустимые преобразования системы внешних сил, действующих на твёрдое тело. 1.Эквивалентные системы внешних сил и допустимые преобразования. Две системы внешних сил F1,F2,..,F N и G1,G2,..,Gs называются эквивалентными, если при замене одной системы сил на другую состояние движения тела (покой) не изменится. Эквивалентные системы сил имеют одинаковые главный вектор и главный момент. Преобразования системы внешних сил, действующих на твердое тело, называются допустимыми, если они не меняют главного вектора и главного момента. 2.Элементарные примеры допустимых преобразований. 1.Сила, действующая на твёрдое тело, есть вектор скользящий. 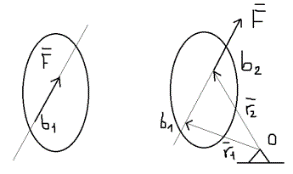 Пусть сила Сравним моменты силы Следовательно, при сдвиге силы вдоль линии действия её момент не изменится и вместе с ним не изменится вторая сумма. Итак, преобразование допустимо. 2.Две силы, приложенные в одной точке тела, можно заменить их геометрической суммой. 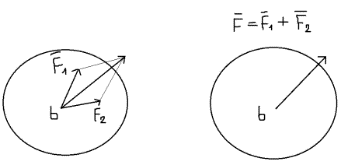 Пусть в некоторой точке приложено две силы: Силу, действующую на твёрдое тело, можно разложить на любое число составляющих. 3.Центр тяжести твёрдого тела. 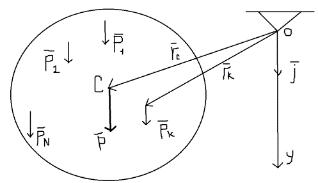 Систему сил тяжести Положение центра тяжести определяется формулами Здесь 4.Распределённые нагрузки. Пусть При выполнении этих условий замена системы сил тяжести одной силой становится допустимой и из неё следует определить точку приложения силы Аналогом удельного веса в распределённых нагрузках является величина q, которая называется интенсивностью распределённой нагрузки. Если q=const, то нагрузка называется равномерно распределённой. - для нагрузок, распределённых по объёму V, -для нагрузок, распределённых по площади S, -для нагрузок, распределённых по линии длиной L, Здесь Равнодействующая равномерно распределённой нагрузки прикладывается в центре тяжести соответствующего геометрического объекта – объёма, площади или линии. Равномерно распределенную нагрузку интенсивности q, приложенную на прямолинейном участке тела длиной L, можно заменить равнодействующей силой Q =qL , приложенной в середине участка. (23)Пара сил. 1.Момент пары. 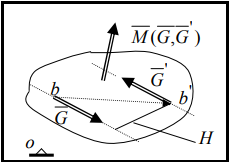 Парой сил называется система двух сил ( Моментом пары сил (  . .Плечом пары сил называется расстояние H между линиями действия сил 2.Допустимые преобразования пары сил. Допустимыми будут такие преобразования пары, которые не изменяют её момента. I. Как жесткое целое пару сил ( II. Силы III. Можно уменьшить модули сил IV. Если на тело действует несколько пар сил ( (24)Теорема Пуансо. 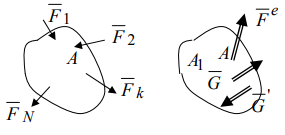 Рассмотрим произвольную систему сил Все силы, приложенные к т. На основании аксиомы о сложении сил, приложенных к одной точке, сложим все силы, приложенные к точке А и заменим их одной силой. На основании теоремы о сложении пар сист. присоед. Пар Формулировка: Произвольную систему внешних сил (25)Заделка. Неподвижный шарнир. Подвижная опора. Реакции в них. Заделка. В строительстве заделка реализуется, когда балка забетонирована в стену, в технике заделка реализуется, когда стальной стержень приварен к массивному телу. 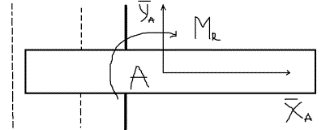 В результате ограничения поворота в заделке дополнительно появляется пара реактивных сил Действие жёсткой заделки на твёрдое тело в силовом отношении сводится к реакции Иногда для крепления тел используется скользящая заделка. От жёсткой она отличается тем, что тело имеет возможность свободно двигаться в некотором направлении. Действие скользящей заделки на тело сводится к одной силе Подвижные опоры. Такие опоры могут содержать некоторые подвижные элементы, которые имеют возможность прямолинейно перемещаться, либо включают в себя два цилиндрических шарнира. 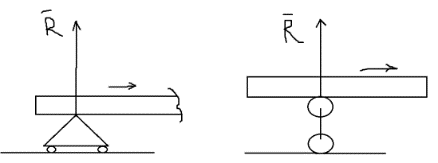 Конструктивно подвижные опоры весьма различны. Особенностью связей, которые подвижные опоры накладывают на тело, является возможность для тела иметь свободное перемещение в каком-либо направлении. Это определяет отсутствие составляющей реакции данного направления. Реакция подвижной опоры направлена перпендикулярно тому направлению, в котором опора не мешает двигаться телу. Здесь мы имеем одну неизвестную величину – модуль R опорной реакции. Шарнирные крепления. 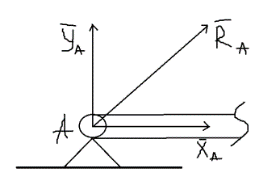 В качестве примера шарнирного крепления можно привести дверные и оконные петли. Механическая суть его заключается в том, что точка А тела, непосредственно контактирующая с осью шарнира, неподвижна. Само же тело может свободно вращаться вокруг этой оси. В неподвижном шарнире отсутствует ограничение на поворот балки вокруг т.А, поэтому реактивная пара сил в шарнире отсутствует и система реактивных сил, действующих на балку со стороны шарнира эквивалентна только одной силе. Обычно её разлагают на 2 составляющие вдоль координатных осей. В неподвижном цилиндрическом шарнире имеется 2 неизвестные величины (26)Работа силы. 1.Дифференциал вектора. 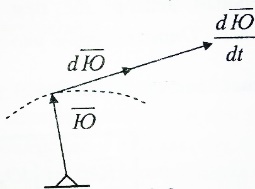 Дифференциалом вектора функции Вектор d 2)Вектор бесконечно-малого пути. 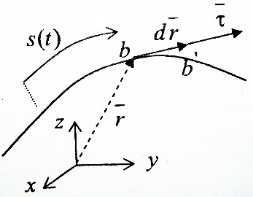 Рассмотрим движение точки b за бесконечно-малое время dt из положения «b» в положение «b`». bb`=dS – бесконечно-малый путь, пройденный точкой b за время dt. Длина вектора Согласно (*) вектор В результате имеем вектор бесконечно-малого пути Так как 3)Элементарная работа силы. Пусть точка b под действием силы F за время dt из положения b перешла в положение b`. Определение: элементарная работа силы F (т.е. работы на бесконечно-малом пути bb`) будем называть скаляр, обозначаемый d`A и определяемый формулой d`A = 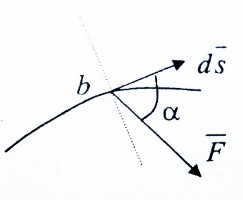 Имеем Пусть 0 < α < 90 следовательно cosα> 0, d`A> 0. «Разгоняющая» сила имеет «+» элементарную работу. Пустьα=90, cos90=0, d`A=0 Если сила перпендикулярна траектории, то ее элементарная работа равна нулю. Пусть 90 < α < 270, cosα < 0, d`A < 0 Элементарная работа «тормозящей» силы отрицательна. d`A = 4) Работа силы на конечном перемещении. Пусть точка b под действием F движется от положения 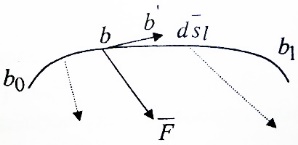 Разделим дугу   5)Работа равнодействующей силы. Пусть в движущейся точке приложено несколько сил    (27)Частные случаи вычисления работы 1)Работа силы, направленной по нормали к траектории. Примером нормальной силы является натяжение веревки, на котором качается шарик.  d d`A = 0 2) Работа постоянной силы.  Пусть  = F( = F(Введём вектор А( Работа постоянной силы равна скалярному произведению вектора силы и ректора кратчайшего расстояния.  Если точка движется по прямой, то тогда А Формула верна. когда F=const и точка движется по прямой. 3) Работы упругой силы пружины  y=z=0 d’A= -cxdx Пусть тележка сдвинулась из положения A= 4) Работа силы тяжести материальной точки. Пусть в точке b движется под действием силы P от положения  Введём вертикальную ось oz. Px=Py=0 Pz=-P d’A=-Pdz  A=P( Работа силы тяжести точки равна взятому с соответствующим знаком произведения модуля веса и перемещения точки по высоте. 5)Работа силы тяжести точек твёрдого тела. 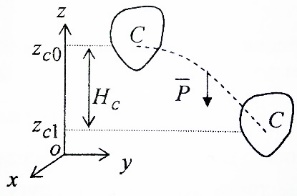 Определим сумму работ сил тяжести  A= 6)Работа вращающего момента. 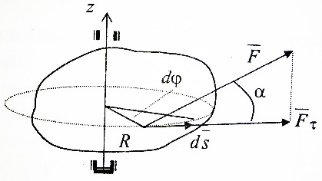 За бесконечно малое время dt точка b перейдет в положение b’, вектор бесконечно малого пути dS направлен по касательной к траектории. Работа dS=bb’=Rdφ d’A= d’A= Сравнивая эти две формулы, говорят что сила работает на перемещении, а момент на угле поворота. Рассмотрим конечное положение точки b от  Пусть Работа постоянного вращательного момента равна произведению вращательного момента и угла поворота тела. 7)Работа внутренних сил в твёрдом теле. 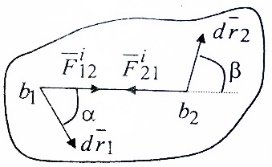 Рассмотрим бесконечно малое перемещение за время dt абсолютно твёрдого тела. Выберем в теле две взаимодействующие точки Так как тело абсолютно твёрдое, то расстояние между точками  По теореме о работе равнодействующей :  . . Проинтегрировав элементарные работы всех внутренних сил на соответствующие перемещения получим (28)Кинетическая энергия. 1.Общие определения. Рассмотрим движение отдельной материальной точки. Пусть точка b движется со скоростью Пусть движется произвольная механическая система. Кинетическая энергия механической системы – сумма кинетических энергий всех её точек. 2.Кинетическая энергия твёрдого тела при поступательном движении. 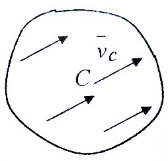 Рассмотрим поступательное движение твёрдого тела, когда его центр тяжести движется со скоростью  , , 3.Кинетическая энергия твёрдого тела при вращении вокруг неподвижной оси.  Выразим модуль вектора скорости произвольной точки тела через угловую скорость :  ) )Кинетическая энергия тела при вращении вокруг неподвижной оси равна половине произведения момента инерции тела ( относительно оси вращения ) и квадрату угловой скорости. 4.Кинетическая энергия тела при плоском движении.  По формуле разложения плоского движения тела на две составляющие, где в качестве полюса примем центр тяжести, тогда Полученное выражение кинетической энергии отражает наличие двух составляющих плоского движения. Первое слагаемое в формуле соответствует поступательной части движения, а второе вращению тела вокруг центра тяжести. В случае свободного движения (29)Теорема об изменении кинетической энергии материальной точки. Рассмотрим движение материальной точки под действием системы сил По основному уравнению динамики после скалярного умножения правой и левой части соотношения на дифференциал радиус вектора точки b, тогда с учетом равенства Правая часть равенства представляет собой элементарную работу равнодействующей : d’A( Теорема об изменении кинетической энергии материальной точки в дифференциальной форме : Дифференциал кинетической энергии материальной точки равен элементарной работе равнодействующей всех сил, действующих на точку. Рассмотрим конечное перемещение точки от положения  . .Интегральная форма теоремы об изменении кинетической энергии материальной точки :  Изменение кинетической энергии материальной точки при некотором её перемещении равна сумме работ всех сил, действующих на точку ( на этом перемещении ). Теорема об изменении кинетической энергии механической системы и твёрдого тела. 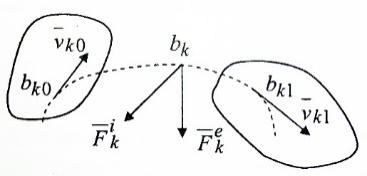 Рассмотрим движение произвольной механической системы. К точке Запишем теорему об изменении кинетической энергии для каждой точки Просуммировав получим Введём обозначения : Изменение кинетической энергии произвольной механической системы при некотором её перемещении равно сумме работ всех внешних и внутренних сил в системе на соответствующих перемещениях отдельных точек системы. В случае абсолютно твёрдого тела формула примет вид : (1)Векторное исчисление 1.Вектор и его модуль. 2.Проекция вектора и знаки проекций. 3.Умножение вектора на скаляр. 4.Составляющие вектора 5.Правые и левые системы координат. 6.Векторное произведение двух векторов. 7.Скалярное произведение двух векторов. 8.Переменный вектор. 9.Производная от вектора. (10)Векторный способ задания закона движения точки 11.Радиус-вектор и траектория движущейся точки |