Термех. термех. 1 Векторное исчисление Вектор и его модуль
 Скачать 2.59 Mb. Скачать 2.59 Mb.
|

|
1) вектор 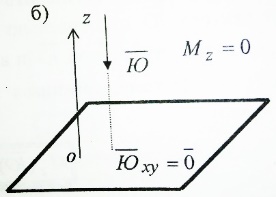 2) линия действия вектора 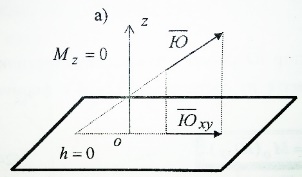 Оба этих случая объединяет тезис. Вектор Вывод: момент относительно точки есть характеристика вращения вокруг точки. Момент относительно оси есть характеристика вращения вокруг оси. Если вращения нет, то моменты равны нулю. (18)Теорема об изменении кинетического момента. 1.Момент силы. 2.Момент количества движения материальной точки. Рассмотрим движение мат. Точки под действием силы 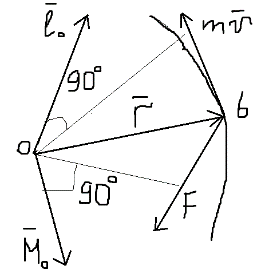 Момент вектора количества движения Если ввести систему декартовых координат с центром в точке о и проектировать формулы (1) и (2) на оси ox, oy, oz, то получим выражения моментов силы и моментов количества движения относительно координатных осей: 3.Теорема об изменении момента количества движения материальной точки. Вывод теоремы начнём с основного уравнения термодинамики, записанного для точки b в виде Справа получили известную величину – момент вектора силы отн. т. О. Для исследования левой части проведём следующее преобразование: В результате получим Теорема: Производная по времени от момента количества движения материальной точки равна моменту равнодействующей всех сил, действующих на точку. Скалярный аналог получим, спроектировав (1) на оси к-т. 4.Кинетический момент механической системы. 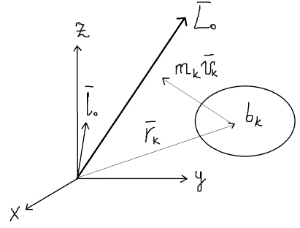 Кинетическим моментом механической системы относительно центра о называется сумма моментов количества движения всех её точек(вычисленных отн. того же центра). Итак, Вектор Спроектируем на оси : 5.Второе свойство внутренних сил в механической системе. 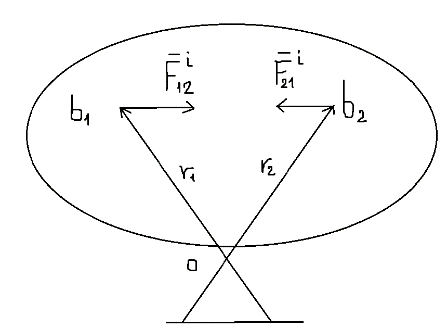 Пусть две точки системы b1 и b2 действуют друг на друга силами  . .Векторы Просуммировав моменты всех внутренних сил, находим: 2-е сво-во внутр. сил.: Cумма моментов всех внутренних сил в механической системе относительно любого центра о равна нулю. 6.Теорема об изменении кинетического момента механической системы. Теорема: Производная по времени от кинетического момента механической системы(относительно о) равна главному моменту внешних сил, действующих на систему( отно-но о). Спроектируем (1) на оси координат. Следствия: 1. Внутренние силы не изменяют кинетического момента механической системы. 2.Если главный момент внешних сил(относительно некоторого центра или некоторой оси) равен нулю, то кинетический момент механической системы(относительно этого центра или этой оси) постоянен. (19)Дифференциальные уравнения вращения тела вокруг неподвижной оси. 1.Кинетический момент тела, вращающегося вокруг неподвижной оси. 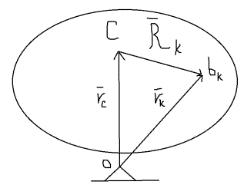 Рассмотрим произвольное движение твёрдого тела и найдём выражение его кинетического момента Здесь  есть кинетический момент, который тело приобретает во вращении вокруг центра масс. есть кинетический момент, который тело приобретает во вращении вокруг центра масс.2.Дифференциальное уравнения вращения. Пример решения. 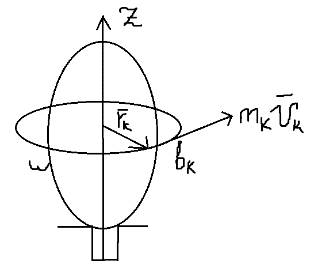 1 Пример: Рассмотрим вращение диска вокруг неподвижной оси под действием постоянной силы 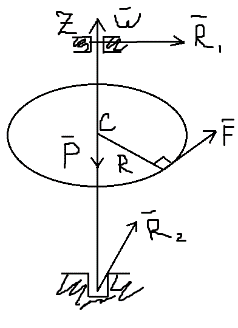 Пусть к ободу диска приложена сила 3.Физический маятник и экспериментальное определение моментов инерции. Физическим маятником называетсятвёрдое тело, которое можетсвободно качаться на неподвижной оси. 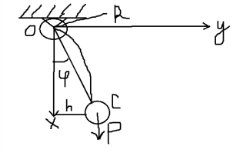 OC=l , вес тела – Р. Решение этого уравнения в виде конечной формулы записать не удастся, поэтому используем метод линеаризации таких уравнений. Рассмотрим малые колебания маятника. Для таких углов дост. Мощностью 4% имеем Спроектируем Момент инерции тела относительно оси равен сумме произведений масс отдельных точек тела и квадратов расстояний от точки до оси. 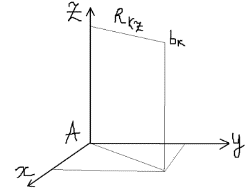 (20)Элементарная теория моментов инерции. 1.Момент инерции стержня и трубы. 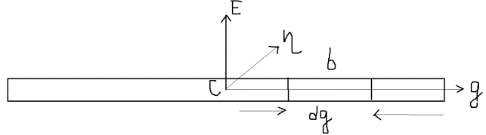 Рассмотрим стержень длиной 2L и выделим в нём бесконечно малый элемент и длиной dg. Если М –масса всего стержня, то масса элемента единичной длины равна M/2L. Поэтому масса точки b есть dm= Находим Момент инерции окружности. 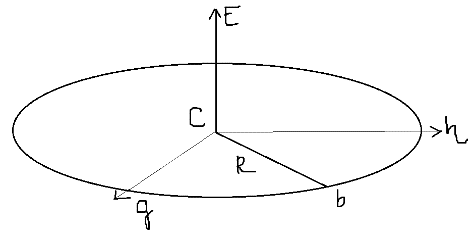 Под окружностью здесь будем понимать тонкую тяжёлую проволоку радиуса R. Вычислим момент инерции относительно оси CE. (21)Статика твёрдого тела. 1.Уравновешенные системы внешних сил. 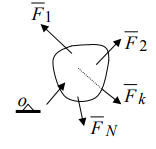 Система сил  2.Скалярная форма уравнений равновесия произвольной системы сил. Введём декартову систему координат с центром в точке о и спроектируем уравнения равновесия системы сил на оси координат: Для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на оси координат и суммы моментов всех сил относительно координатных осей были равны нулю. |