Термех. термех. 1 Векторное исчисление Вектор и его модуль
 Скачать 2.59 Mb. Скачать 2.59 Mb.
|

|
1.Основное уравнение динамикиматериальной точки Рассмотрим движение мат. т. B относительно инерциальной системы отсчета. Пусть 2.Дифференциальные уравнения движения материальной точки ввекторной форме и в проекциях на оси координат имеют вид m Спроектировав формулу на оси декартовой системы координат с центром в неподвижной точке о .(проекции радиус вектора точки на оси координат равны координатам точки rx=xb, ry=yb,rz=zb В результате получим  , , , , 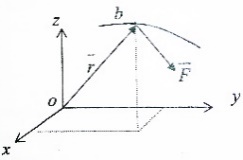 3.Две основные задачи динамики материальной точки Первая (прямая) задача динамики. Известен закон движения точки x(t), y(t), z(t). Определить равнодействующую всех сил, действующих на точку. Решается дифференцированием координат при использовании дифференциальных уравнений движения. Вторая (обратная) задача динамики. Известны силы, действующие на материальную точку. Определить закон движения точки. Решается интегрированием дифференциальных уравнений движения. 4. Статика мат. точки, уравнение равновесия. Пусть точка b неподвижна т.е 5.Cвободные колебания мат. точки 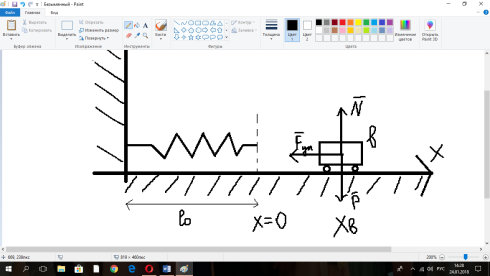 Пусть l0 длина ненапряженной пружины . введем ось Ох с началос отсчета в конце ненапряженной пружины Fx= – cx, сила стремится вернуть точку в равновесное положение, "с" – коэффициент жесткости пружины F= силе упругости при деформации, равной единице [Н/м]. x: y: x(t)=C1sin(kt+C2)(*)здесь С1 и С2 константы интегр-ия которые опред изначально услов задачи. t=0 должно быть известно положение точки.T=0 x=x0,Vx=Vx0 продиф (*) по врем и получаем Vx(t)=C1kcos(kt+C2)(**) продиф по вр(**) V2x/dt2=-C1k2sin(kt+C2) Для опред-ия констант интегрирования(*) и(**) при t=0решаем систему x0=C1sinC2,V0=-C1kcosC2x0/V0=tgC2/kC2=arctgx0k/V0xC1=  Вся информация о движении мат. т. при известных нач.т. соед-ет всю информацию о движ. Однако иногда требуется не вся инф-ия , а только частичная инф. о движении. Она содержит теор о динамике, а именно теор об изменениях кол-ва движ(теорема об измен. Кинет. Энергии.) 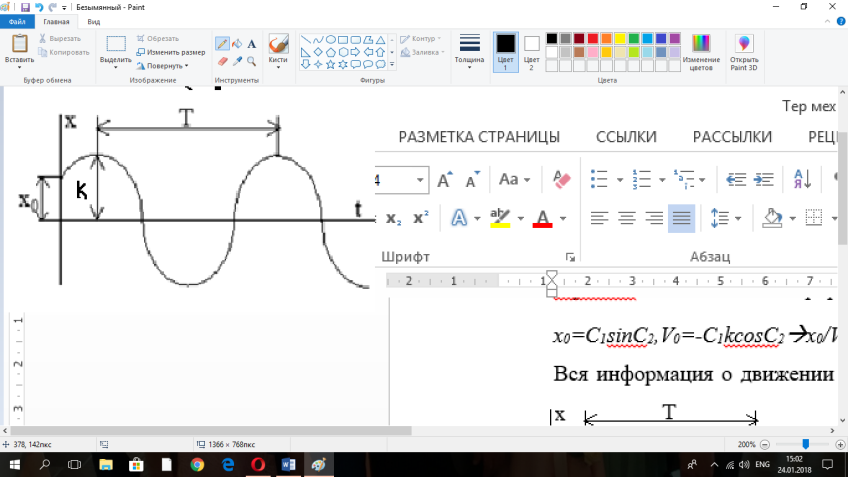 (12)Принцип Даламбера и сила инерции. Принцип освобождения от связей приводит к появлению пассивных сил(это реакции связи, они сами не вызывают движение точки), принцип равенства действия и противодействия порождает активные силы(Силы способные вызывать движение точки(Вес)).Сумму всех сил действ. На точку ставим, как сумму 2-х сил. 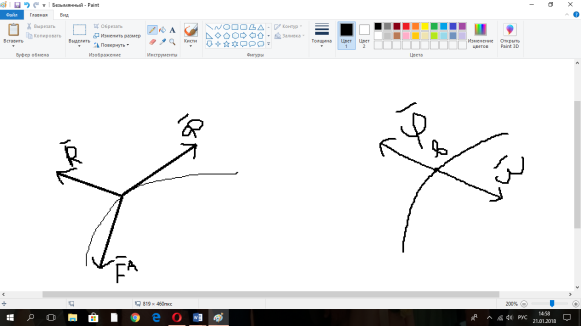 Принцип Даламбера: активные силы и реакции связей при любом движении мат. т. всегда можно уравновесить силой инерции.Принятие этого принципа означает переход от неподвижной( инерциальной) системы отсчетаохуz, к подвижной системе координат. При этом вводится сила инерции и основное уравнение динамики заменяется уравнением равновесия. (13)Общие сведения о механической системе. 1.Определение и примеры механических систем. Механической системой наз-ся совокупность матер. точек, движения которых взаимосвязаны. Рассмотри два тяжелых шарика b1 и b2, соединённых тонким стержнем, массой которого можно принебречь по сравнению с массами шаров. Их движение в свободном полете связаны таким образом, что расст-е м-у ними всегда остается неизменным. Здесь мы имеем пример так называемой неизм. мех. сист. Если шары соединить невесомой пружиной, то расстояние м-у шарами при движении может меняться – система изменяемая. Тв. тело как мех. сис-ме можно трактовать по-разному в завис-ти от того, что считать мат т. сис-мы. При дроблении мат. т. принимают мелкую частицу тела. И получают мех. сис-му, состоящую из большого числа точек. Любое тело можно рассматривать как мех. сис-му вопрос заключается лишь в том, что выбирается в качестве мат. т. в сис-ме. Далее будем пользоваться след сис-мой обозн. мат. т. – в1,…, вк,…,вn.; вк – произвольн. т. в сис-ме; мк – ее масса; 2.Внешние и внутренние силы. 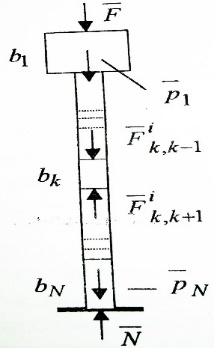 Внешними силами действ. на точки мех. сис-мы наз-ся силы, возникающие в рез-те взаимодействия точек сис-мы с телами не входящ. в сис-му и обозн. 3.Первое св-во внутр. сил в мех. сис-ме. Пусть т. b1 действует на т b2 силой (14)Теорема о движ-и центра масс мех. сис-мы. Определение центра масс. Центр масс мех. сис-мы будем называть т. С, положение которой определяется соотношением  ; ;(15)Вывод теоремы одвижения центра масс. 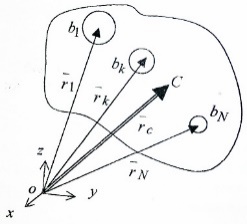 Продифф-ем  1). Продиф-ем (1) по времени 1). Продиф-ем (1) по времени (16)Теорема об изменении кол-ва движения. 1.Определенный интеграл от вектора. Рассмотрим произв. вектор 2.Импульс силы. Пусть т. b движется под действием силы Импульсом за бесконечное малое время dt будем называть вектор d 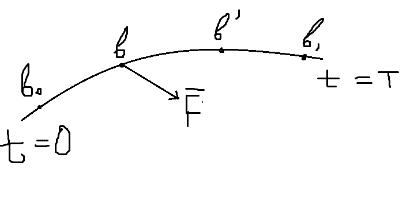 3.Теорема об изменении количества движения материальной точки. Количеством движения материальной точки будем называть вектор 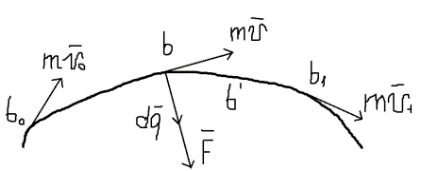 Модуль вектора количества движения определяется соотношением q=mv. Рассмотрим движение отдельной материальной точки под действием некоторой системы сил с равнодействующей Внесем массу точки под знак производной, в результате получим Итак, производная от вектора количества движения материальной точки равна равнодействующей сил, действующих на точку. Последнюю формулу часто представляют иначе. Ее правую и левую части на бесконечно малый промежуток времени dt. В результате получаем теорему об изменении количества движения точки в дифференциальной форме: Рассмотрим конечное перемещение точки от положения b0 до положения b1 за промежуток времени [0, T]. Возьмем интеграл по времени от правой и левой части формулы (2). Имеем Изменение количества движения материальной точки (за некоторый промежуток времени) равно сумме импульсов всех сил, действующих на точку ( за этот промежуток времени). Спроектировав (4) на оси координат, получим : 4.Количество движения механической системы. Пусть движется произвольно мех. система. Кол-вом движения мех. сис-мы будем называть вектор 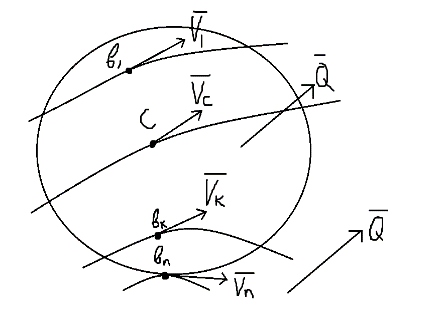 Рассмотрим 2-а частных случая поступательных движ-я тверд. тела. 1) 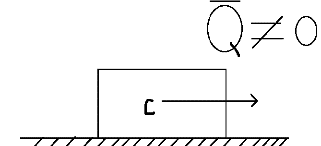 2) 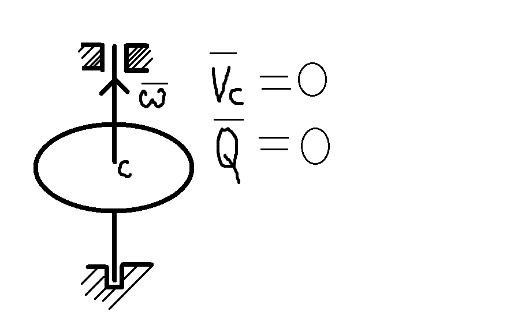 Учитывая эти два случая говорят, что кол-во движения тверд. тела характеризует поступательную часть движения. 5.Теорема об изменении количества движения механической системы. Рассмотрим движение механической системы. Для произвольной точки Просуммируем все эти соотношения: Теорема в диф. форме: 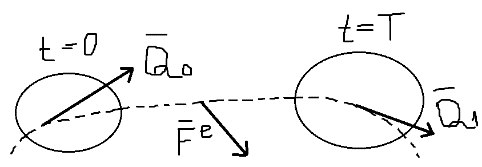 Пусть в начальный момент времени t=0 система имела количество движения В проекциях на оси координат имеем : Следствия: 1. Внутренние силы не влияют на количество движения механической системы. 2.Если главный вектор внешних сил равен нулю, то количество движения механической системы постоянно. 3. Если проекция главного вектора внешних сил на какую-либо ось равна нулю, то проекция количества движения механической системы на эту ось постоянна. Примеры. Давление струи на колено трубы. Теорему об изменении кол-ва движ-я в системе часто используют при исследовании жидкости. Рассмотрим колено трубы диаметром d. по которой жидкость плотностью p бежит со скоростью V0 двумя сечениями выделим объем жидкости. За время Т этот объем перейдет в положение a’b’, 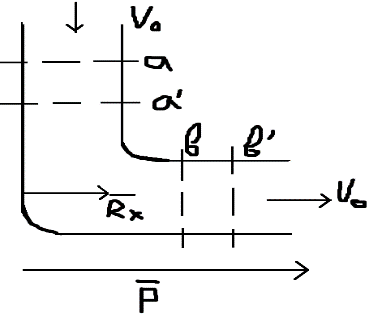  (17)Момент вектора. I.Определение момент вектора относительно точки (центра). 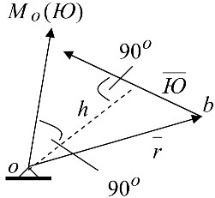 Моментом вектора Момент вектора Согласно условиям векторного умножения Плечом вектора h= rsinα. II. Скалярное определение момента вектора относительно точки. Существуют задачи, в которых все вектора описывающие механические явления лежат в некоторой плоскости (плоские задачи). В таких задачах вектор Моментом вектора Момент вектора Знак «+» в этой формуле следует ставить, когда вектор III.Момент вектора относительно координатных осей.  Определим момент вектора Аналогично: Для определения момента вектора IV.Теорема о моменте суммы. Пусть в точке b приложены несколько векторов  Запишем момент вектора  Теорема: Момент силы равен сумме моментов V.Момент вектора как характеристика вращения. Пусть линия вектора Рассмотрим, когда  Оба этих случая объединяет тезис. Вектор Рассмотрим случай, когда момент относительно оси равен нулю. |