5fan_ru_модернизация электропривода механизма изменения вылета с. Ведомость дипломного проекта 7
 Скачать 1.07 Mb. Скачать 1.07 Mb.
|

Модификации электроприводов:Частотно-регулируемые электроприводы с электромагнитным торможением и рассеянием энергии на резисторе. Частотно-регулируемые электроприводы с электромагнитным торможением и рекуперацией энергии в сеть, содержащие входной активный выпрямитель, который обеспечивает: Частотно-регулируемые электроприводы для механизмов, имеющих «вентиляторную нагрузку» (насосы, вентиляторы, центрифуги, дымососы и т.д.). Мощность от 3 до 350 кВт. Частотно-регулируемые электроприводы общепромышленного назначения (конвейеры, рольганги, экструдеры и т.д.) с моментом нагрузки, не зависящем от скорости вращения электродвигателя. Мощность от 2,2 до 315 кВт. Крановые электроприводы с большой перегрузочной способностью. Мощность от 1,7 до 160 кВт. Технические характеристики частотно-регулируемых электроприводов «ЭРАТОН-М4»Коэффициент мощности основной гармоники cos =1 КПД при номинальной нагрузке не менее 0,98 Диапазон регулирования выходной частоты преобразователя, Гц: с постоянством момента 1… 50 Гц; с постоянством мощности 50 … 100 Гц Диапазон изменения выходного напряжения 0 … 380 В Электропривод снабжён последовательным портом RS-485 Технические параметры частотно-регулируемого электропривода «ЭРАТОН-М4»
4.1.9 Электроприводы АТ Корпорации ТРИОЛАТ – асинхронный транзисторный электропривод.Предназначен для автоматического управления широким спектром производственных машин, механизмов и комплексов с приводными асинхронными двигателями в различных сферах промышленности и коммунального хозяйства [20]. Выполнен на основе двухзвенного преобразователя частоты с транзисторным (IGBT) автономным инвертором напряжения с широтно-импульсным управлением, оснащен многофункциональной микропроцессорной системой управления с развитым интерфейсом.Шкала мощностей: от 5,5 до 315 кВт для электродвигателей класса напряжения 0,4 кВ; от 160 до 1600 кВт для электродвигателей класса напряжения 6(10) кВ.Диапазон регулирования выходной частоты 0,5…50 (100 и более, по заказу) Гц.Коэффициент полезного действия (преобразователя) не менее 0,95.Коэффициент мощности сети (во всех режимах) не менее 0,95.4.2 Выбор типа электропривода Проанализировав данные поиска в сети Internet можно сделать вывод о том, что электроприводы серии OMRON, KEB COMBIVERT F5 BASIC, Hitachi L300P, Hitachi SJ300, Toshiba TOSVERT VF-P7 удовлетворяют нашим требованиям, но требуют квалифицированного зарубежного обслуживания, дороже отечественных и в виду недостатка документации по ним, рассматривать не следует. Среди оставшихся могут быть выбраны электроприводы серии ОМЕГА-22, АПЧ, ЭРАТОН-М4 и электроприводы АТ Корпорации ТРИОЛ. Все они в равной мере удовлетворяют предъявленным требованиям, но, учитывая, что электроприводы серии ОМЕГА-22, ЭРАТОН-М4 и АТ Корпорации ТРИОЛ стоят дороже, выбираем преобразователь частоты серии АПЧ производства ОАО “Чебаксарский Электроаппаратный завод“. 5 Описание работы преобразователя АПЧ 5.1 Назначение и технические характеристики Преобразователь частоты серии АПЧ (в дальнейшем именуемый преобразователем) представляет собой электромеханическую систему [12], включающую стандартный асинхронный двигатель с короткозамкнутым ротором без датчика скорости на валу и преобразователь частоты типа «неуправляемый выпрямитель - транзисторный инвертор напряжения» с микропроцессорной системой управления. Преобразователь предназначен для механизмов вентиляторов, насосов, компрессоров, экструдеров, подъемно-транспортных средств, приводов главного движения металлорежущих и деревообрабатывающих станков, приводов вспомогательных механизмов, а также других механизмов в различных отраслях промышленности, в энергетике, коммунальном хозяйстве, если требуемый диапазон регулирования скорости не превышает 100:1. Преобразователь обеспечивает работу в ручном и автоматическом режиме. В ручном режиме стабилизируется частота вращения асинхронного двигателя. В автоматическом режиме регулирование частоты вращения выполняется с целью стабилизации технологического параметра с использованием встроенного ПИД-регулятора и сигнала обратной связи от датчика технологического параметра. Конструктивно преобразователи выполнены в виде навесных блоков одностороннего обслуживания. Преобразователи выпускаются в диапазоне мощностей от 5,5 до 110 кВт. Основное исполнение преобразователей частоты по климатическим условиям – УХЛ, по категории размещения – 4, по степени защиты – IP20 согласно ГОСТ 15150-69, ГОСТ 14254-80, при этом температура воздуха в шкафах комплектных устройств, в которые встраивается преобразователь частоты, не должна превышать 450 С. Примечание – Возможна поставка преобразователей частоты других исполнений в соответствии с требованиями заказчика. Технические данные преобразователя: - Напряжение питания UiN 3, 380 В+10-15% 48-63 Гц - Частота F 48-63 Гц - Ряд выходных мощностей Рн 5,5; 7,5; 11,15,22,30,55, 75, 90, 110кВт - Выходное напряжение Uout 3 0 ' Uin - Выходная частота Fou 0,1- 50 (100) Гц;0,1 - 400Гц - Номинальный выходной ток In 10А, 16А, 25А, 32А, 40А, 63А, 100А, 150А, 180А, 220А - Перегрузочная способность преобразователя по току I/In 130% в течение 1 мин - Диапазон регулирования скорости с ограничением по нагреву двигателя D 20:1 -Точность стабилизации скорости при нагрузке - на номинальной скорости двигателя Δωн не хуже 3% -на 0,1 от номинальной скорости двигателя Δωн не хуже 30% - Неравномерность вращения на холостом ходу: - при номинальной скорости двигателя не более 5% - при 0,02 от номинальной скорости двигателя не более 25% Данные приведены для преобразователей с использованием асинхронных двигателей серии 4А, АИР. 5.2 Устройство и принцип работы преобразователя Преобразователь выполнен на базе трехфазного асинхронного двигателя с короткозамкнутым ротором без датчика скорости на валу и преобразователя частоты с неуправляемым выпрямителем и инвертором напряжения на IGBT [12]. На выходе преобразователя формируется напряжение регулируемой амплитуды и частоты, подаваемое на обмотки фаз статора двигателя, соединенные, как правило, в звезду. Изменение амплитуды и частоты выходного напряжения преобразователя выполняется системой управления по определенному закону, обеспечивающему регулирование и поддержание на заданном уровне частоты вращения двигателя. Ниже показана форма выходного напряжения преобразователя частоты, а также временные диаграммы фазного тока и скорости двигателя при реверсе преобразователя (рис. 5.1.). Функциональная схема преобразователя приведена на чертеже 1804.Д05.117.00.00.Э2. Силовая часть преобразователя включает следующие основные элементы: - модуль трехфазного мостового выпрямителя (В) с варисторным ограничителем перенапряжений, подключаемый к сети контактором КМ1; - емкостный фильтр звена постоянного напряжения (Ф); - узел сброса энергии торможения, состоящий из балластного резистора и ключевого элемента на IGBT-транзисторе с быстродействующим обратным диодом; - трехфазный мостовой инвертор напряжения, выполненный на базе шестиключевого IGBT-модуля; - драйвер силовых ключей, обеспечивающий управление затворами IGBT-транзисторов, формирование сигналов защит и гальваническую развязку силовых и управляющих цепей; - вентилятор, обеспечивающий интенсивный отвод тепла от силового радиатора; - бесконтактный узел предзаряда емкости фильтра, обеспечивающий плавное нарастание напряжения по команде системы управления; 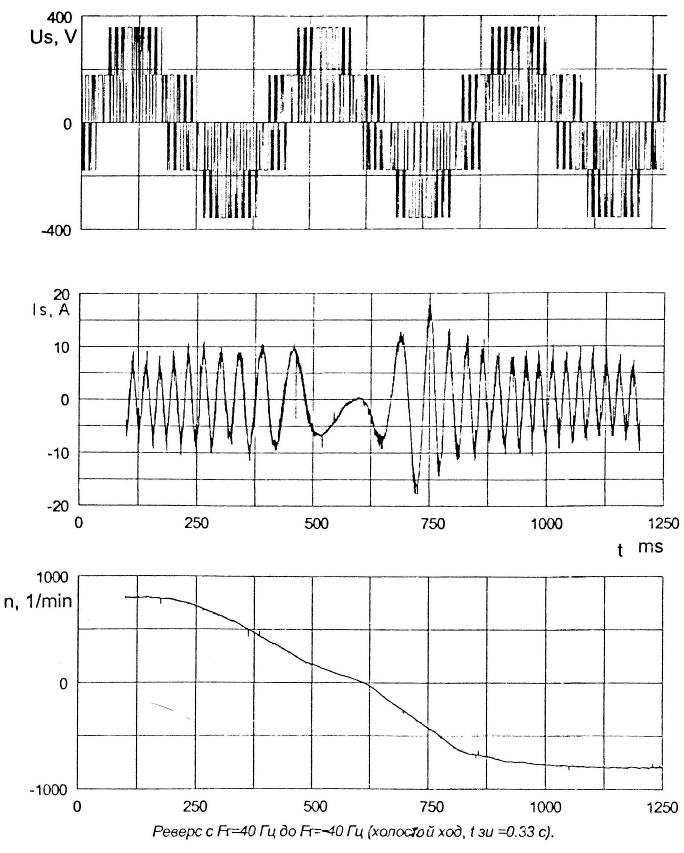 Рис 5.1. Диаграмма фазного тока и скорости двигателя при реверсе преобразователя - узел управления включением силового питания, коммутирующий контактор КМ1 по команде системы управления; Датчиковая система включает: - датчик напряжения, состоящий из резистивного делителя и изолирующего усилителя, установленный в звене постоянного напряжения; - датчики тока Т1, Т2, установленные в выходных фазах V и W инвертора; - датчик температуры силового радиатора, установленный в непосредственной близости от IGBТ-модуля; - дополнительный вход для обслуживания встроенного в двигатель датчика температуры (РТС или NTC-резистора); Блок питания цепей управления вырабатывает напряжения +5 В питания цифровой части системы управления, ±15 В питания аналоговой части системы управления, изолированное напряжение +24 В питания внешних цепей, изолированное напряжение +24 В для субмодуля питания драйвера, изолированное напряжения ±15 В питания первичной стороны датчика напряжения; Субмодуль питания драйвера формирует 7 изолированных каналов + 15/минус 5 В питания выходных каскадов управления затворами IGBT [12]; Упрощенная структура системы управления преобразователя АПЧ приведена на чертеже 1804.Д05.117.00.00.Э1, лист4. Система управления состоит из интерфейсной части, аналого-цифрового преобразователя, микропроцессорного ядра, встроенного пульта управления. Интерфейсная часть обеспечивает взаимодействие преобразователя с внешними устройствами автоматики. Аналого-цифровой преобразователь под управлением микроконтроллера формирует коды, соответствующие аналоговым сигналам задания и сигналам датчиковой системы. Система управления, обеспечивает обработку входных сигналов и сигналов обратной связи, вычисление переменных внутренних и внешних контуров регулирования, формирует сигналы управления силовыми ключами инвертора, выполняет защитные, диагностические и сервисные функции. Параметры структуры системы управления доступны для просмотра и редактирования с помощью встроенного пульта управления. 5.3 Интерфейс Интерфейсная часть системы управления включает развитый набор стандартных средств взаимодействия преобразователя с устройствами автоматики [12]. Входные аналоговые сигналы: - Изолированный аналоговый вход (Volt IN) в стандарте от 0 до ±10 В или 0 до ± 5В. Выбор диапазона изменения управляющего сигнала выполняется в соответствующем меню встроенного пульта управления. Изменению полярности задающего сигнала соответствует изменение направления вращения двигателя. Входное сопротивление 20 кОм. - Для ручного задатчика скорости от потенциометра рекомендуется использовать встроенный источник опорного напряжения 10 В (10V REF) - Изолированный аналоговый вход (+Cur IN I -Cur IN) в стандарте от 4 до 20 мА. Имеет прямой и инверсный входы и может использоваться для ввода задания по скорости или сигнала обратной связи от датчика технологического параметра. Аналоговые входы могут действовать совместно в режиме суммирования или разности сигналов с помощью установки перемычек J7, J8 на плате управления и использования входного сигнала напряжения нужной полярности одновременно с прямым или инверсным токовым сигналом. Входные логические сигналы: Изолированные логические входы (стандартные): - «Разрешение 1» (ENBL1); - «Разрешение 2» (ENBL2); - «Сброс защит» (Er RST); - «Направление вращения» (Direct); Изолированные входы (программируемые): - «1-й бит программируемого уровня скорости» (L0G1); - «2-й бит программируемого уровня скорости» (L0G2); - «3-й бит программируемого уровня скорости» (L0G3); - «Разгон с программируемой интенсивностью в прямом направлении» (L0G4); - «Разгон с программируемой интенсивностью в обратном направлении» (LOG 5); - «Запуск работы по циклограмме» (L0G6); Входные логические сигналы управления преобразователем ENBL1, ENBL2, Direct, Er RST должны быть сформированы в виде замыкания (логическая единица) или размыкания (логический ноль) контактов внешним устройством (например, ручным пультом управления). При этом первые три сигнала являются непрерывными и должны сохранять свое состояние в процессе работы, а сигнал Er RST - импульсный и формируется кратковременным замыканием контакта. Сброс сигнала «Разрешение 1» (ENBL1 = 0) вызывает мгновенное запирание силовых транзисторов инвертора, при этом двигатель тормозится свободным выбегом. Сброс сигнала «Разрешение 2» (ENBL2 = 0) вызывает частотное торможение двигателя с программируемой пользователем интенсивностью. Установка сигнала «Разрешение 1» (ENBL1 = 1) разрешает подачу напряжения на двигатель. Если при этом (ENBL2 = 0), система управления формирует неподвижный вектор напряжения, и двигатель находится под током, определяемый статическим законом регулирования. При установке сигнала «Разрешение 2» (ENBL2 = 1) двигатель разгоняется до заданного уровня скорости с программируемой пользователем интенсивностью. Сигнал «сброс защит» Er RST служит для сброса триггера защит и разблокирования преобразователя. Изменение направления вращения двигателя может производиться в любой момент как сменой полярности входного аналогового сигнала задания скорости, так и логическим сигналом «направление вращения» Direct (Direct = 0 - прямое вращение, Direct = 1 - обратное). Установка различных комбинаций состояния сигналов LQG1-L0G3 позволяет задавать до семи различных фиксированных уровней скорости, программируемых пользователей. Установка / сброс сигнала L0G4 активизирует / блокирует ускорение преобразователя с программируемой пользователем интенсивностью в прямом направлении вращения. Установка / сброс сигнала LOG5 активизирует / блокирует ускорение преобразователя с программируемой пользователем интенсивностью в обратном направлении вращения. Установка сигнала L0G6 активизирует работу преобразователя по циклическому алгоритму, программируемому пользователем шагами (кадрами) в соответствующих пунктах меню встроенного пульта управления. Логические сигналы формируются уровнем 24 В от встроенного или внешнего источника питания. Дополнительный выход 24В (24VDC). Встроенный изолированный стабилизированный источник постоянного напряжения 24 В может использоваться для формирования входных логических сигналов и для питания внешних устройств (датчиков технологических параметров). Нагрузочная способность встроенного источника питания 24 VDC 80 мА (2 Вт). Выходные аналоговые сигналы: - ток фазы V (Iv); - ток фазы W (lw)l - напряжение в звене (UDC); - входной аналоговый управляющий сигнал (Analog IN); Все выходные аналоговые сигналы измеряются относительно аналоговой земли системы управления и не имеют гальванической развязки. Изолированный частотный сигнал (FM_Out) о переменной электропривода, запрограммированной пользователем для монитора. Может использоваться для подключения цифрового или стрелочного измерительного прибора. Нагрузочная способность выхода 24 В, 8 мА. Выходные логические сигналы: - Изолированный логический сигнал «Готовность 1» (READY1); - Изолированный логический сигнал «Готовность 2» (READY2); - Изолированный логический сигнал «Частота равна О» (F=0); - Изолированный логический сигнал «Частота равна заданной» (F=Rеf). Логические сигналы могут быть использованы для контроля состояния преобразователя устройствами автоматики. Сигналы формируются системой управления в виде «сухих контактов», активный уровень сигнала соответствует замкнутому состоянию контакта. Нагрузочная способность выходов ±250 В, 100 мА. Логический сигнал «Готовность 1» (READY1) формируется при отсутствии активного состояния защит первой группы. Логический сигнал «Готовность 2» (READY1) формируется при отсутствии активного состояния защит второй группы. Логический сигнал «Частота равна О» (F=0) формируется, когда частота основной гармоники выходного напряжения преобразователя равна нулю. Логический сигнал «Частота равна заданной» (F=Ref) формируется, когда программируемый задатчик интенсивности выдает постоянное задание и частота основной гармоники выходного напряжения преобразователя соответствует этому заданию. Последовательный порт RS-485 Двунаправленный изолированный последовательный канал в стандарте RS-485 может быть использован для организации управления от контроллера, программируемого персонального компьютера или системы автоматизации более высокого уровня, а также для двустороннего обмена диагностической информацией с объектом управления при согласовании соответствующего протокола. Порт сконфигурирован для работы в полудуплексном режиме. Максимальное напряжение изоляции - 1600В. Максимальная скорость передачи / приема данных 2,5 Мбод. 5.4 Система защит Реализует две группы защит: быстродействующие, срабатывание которых мгновенно блокирует привод, сбрасывает выходной логический сигнал «Готовность 1» (READY1) и отключает силовое питание преобразователя, и медленнодействующие, мгновенно сбрасывающие выходной логический сигнал «Готовность 2» (READY2) и блокирующие привод с выдержкой времени. К первой группе защит относятся: - максимально-токовая защита преобразователя; - защита от пропадания питания цепей управления; - защита от сбоев программного обеспечения; - защита от превышения напряжения; - защита от понижения напряжения; - защита от аварии узла сброса энергии. Максимально-токовая защита преобразователя выполняется путем контроля возникновения режима короткого замыкания в инверторе, замыкания выходных фаз между собой и на корпус с мгновенным запиранием силовых ключей и отключением от сети [12]. Защита от замыканий во входных цепях и внутренних замыканий выпрямителя на корпус выполняется внешним автоматическим выключателем или плавкими вставками. Защиты от повышения и понижения напряжения выполняются по сигналу датчика в звене постоянного напряжения. Порог срабатывания защиты от повышения напряжения составляет +20% от номинального значения линейного напряжения сети. Порог срабатывания защиты от понижения напряжения и обрыва фазы составляет минус 15% от номинального значения линейного напряжения сети. Ко второй группе защит относятся: - время - токовая защита двигателя; - температурная защита преобразователя; - температурная защита двигателя (при наличии встроенного датчика температуры); - защита от аварии технологического механизма. Защиты второй группы выполняются программными средствами по сигналам датчиковой системы. Пороги срабатывания защит могут быть перепрограммированы пользователем. Диагностика срабатывания защит выполняется отображением соответствующих флагов в строке состояния встроенного пульта управления. 6 Статический расчет системы 6.1 Расчет параметров объекта регулирования Данные двигателя 4А200M6Y3 [16] : - номинальная мощность - синхронная частота вращения - коэффициент полезного действия - коэффициент мощности - обмоточные данные - пусковой момент в относительных единицах - критический момент в относительных единицах - номинальное скольжение - критическое скольжение - момент инерции двигателя Найдем номинальный ток статора  = = A, A,где  = =где Синхронная угловая скорость двигателя:  = =В формулы для расчета параметров объекта регулирования входят обмоточные данные двигателя, которые взятые из справочника [20]. При этом надо иметь в виду, что в справочнике [20] сопротивления обмоток двигателя приведены в относительных единицах. Поэтому необходимо произвести перерасчет сопротивлений в абсолютные единицы по формулам:  = = = = = = = =Расчет параметров объекта регулирования производится в соответствии с литературой [13, 18, 19]. Индуктивность обмотки статора и приведенная к статору индуктивность обмотки ротора:   Электромагнитная постоянная времени двигателя:  Индуктивность фазы двигателя:  Активное сопротивление фазы двигателя при номинальном скольжении sном:  Постоянная времени нагрузки:  Расчетный коэффициент:  Напряжение на входе инвертора (на выходе выпрямителя):  Входной ток инвертора (выходной ток выпрямителя):  Допустимое увеличение напряжения на входе инвертора: При емкостном фильтре максимальная емкость конденсатора определяется по формуле:  Относительная частота напряжения статора:  Абсолютное скольжение двигателя в рабочей точке: Коэффициент согласования относительного значения фазного напряжения статора двигателя  с входным напряжением инвертора с входным напряжением инвертора  , ,При соединении обмотки статора двигателя в звезду  , тогда , тогда Коэффициент согласования входного тока инвертора с фазным током статора двигателя:  Фиктивное сопротивление:  ,где Фиктивный пусковой момент двигателя при номинальных значениях напряжения и частоты статора:   Постоянная времени сглаживающего фильтра: 6.2 Расчет механических характеристик Р  где  - синхронная угловая скорость двигателя при частоте напряжения статора - синхронная угловая скорость двигателя при частоте напряжения статора Построим механические характеристики при частотах f1 50; 35; 25 Гц. Механические характеристики приведены на рис.6.1. 6.3 Расчет параметров регулятора напряжения Расчетная схема И - регулятора напряжения представлена на рис.6.2. Передаточная функция регулятора напряжения:  , ,где Uуи напряжение управления инвертора по каналу напряжения, принимается равным 10 В  Рис. 6.1. Механические характеристики асинхронного двигателя при частотах f1=50, 35, 25 Гц  Рис. 6.2. Расчетная схема И - регулятора напряжения Передаточная функция регулятора напряжения в числовом виде:  Задаваясь сопротивлением резистора в цепи задания Rзн=50 кОм, из выражения определим значение Сосн:  7 Расчет переходных процессов Структурная схема привода приведена на чертеже 1804.Д05.117.00.00.Э1, лист 5. В данном разделе будут исследованы переходные процессы по управляющему и возмущающему воздействию. Для расчета переходных процессов необходимо определить передаточные функции звеньев системы в числовом виде:          По полученным передаточным функциям звеньев системы, составлена схема моделирования, которая приведена на рис.7.1. Расчет переходных процессов выполним в системе MatLab. Для ограничения пускового тока в пределах допустимого для преобразователя (1,3IH) используется задатчик интенсивности. Графики переходных процессов, полученных в результате моделирования представлены на чертеже 1804.Д05.117.00.00.Д и рис. 7.2 – 7.7. Анализ переходных процессов показывает, что при пуске двигателя без задатчика интенсивности пусковой ток превышает допустимый ток преобразователя в 6 раз, что недопустимо. Для ограничения пускового тока на уровне допустимого значения (1,3IH) для преобразователя используем задатчик интенсивности с постоянной времени ТЗИ=0,25с. При ограничении пускового тока разгон двигателя проходит плавно, без перерегулирования. Поэтому переходные процессы затянуты по времени. Время переходного процесса без нагрузки составляет 0,36с, а под нагрузкой 0,4с. Однако для наших условий это допустимо. 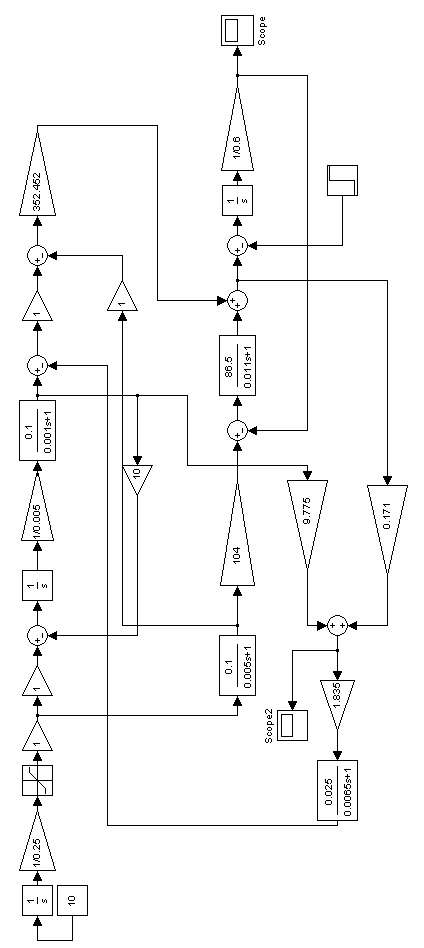   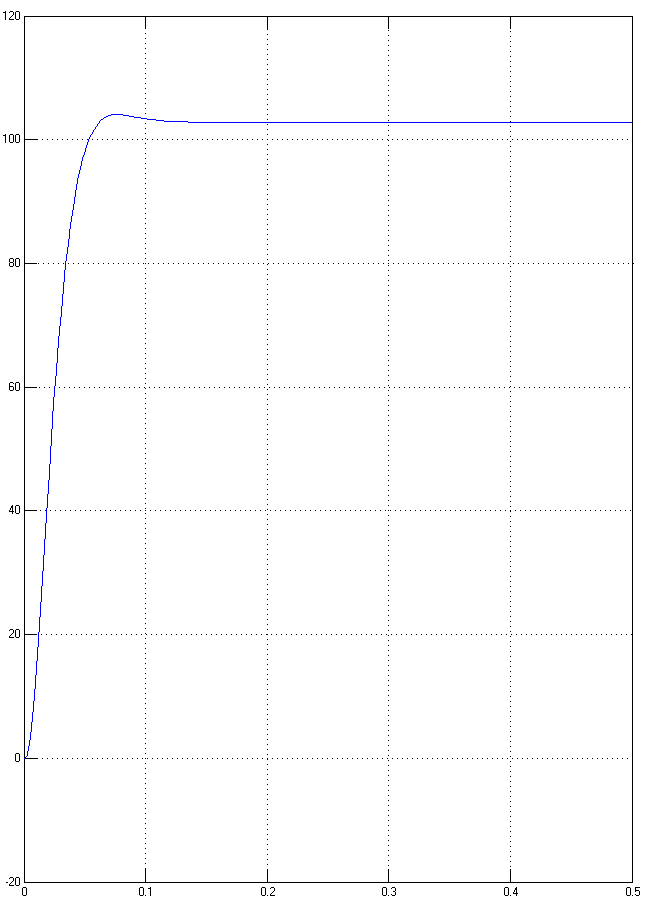 1/c Ω t c Рис. 7.2. График переходного процесса скорости при пуске на холостом ходу без ЗИ. 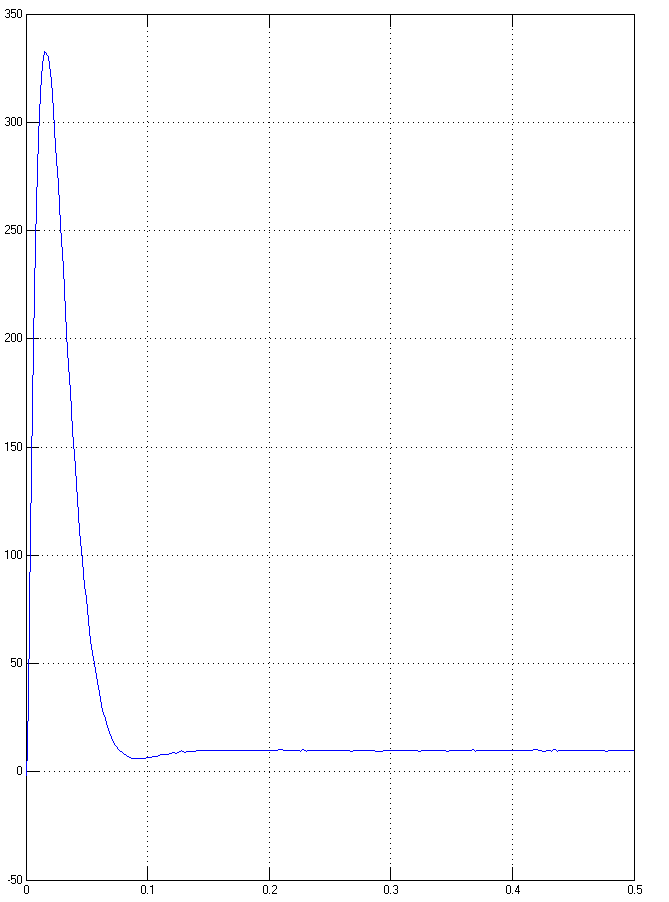 I A t c Рис. 7.3. График переходного процесса тока при пуске на холостом ходу без ЗИ. 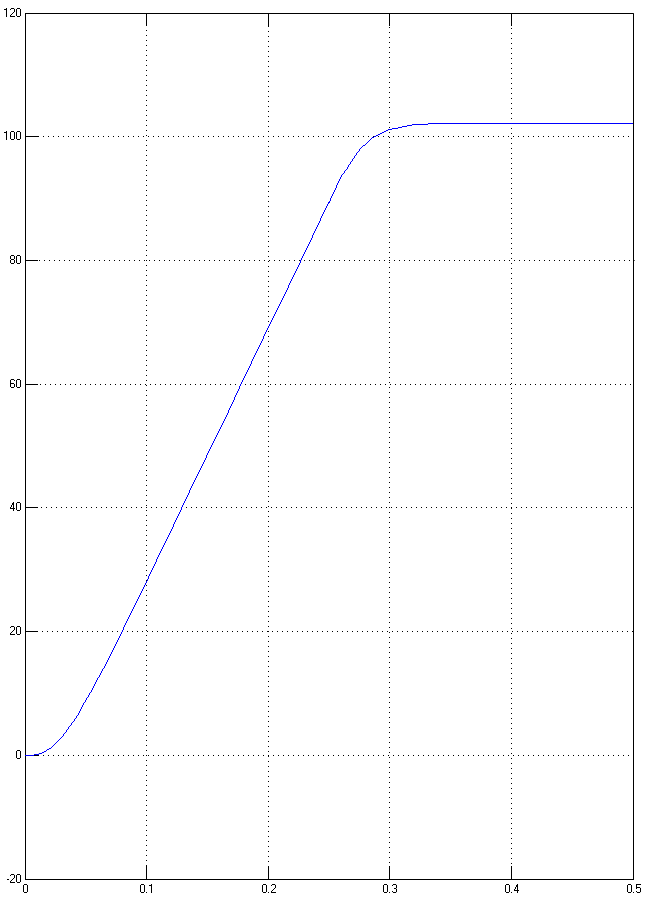 Ω 1/c t c Рис. 7.4. График переходного процесса скорости при пуске на холостом ходу с ЗИ, ТЗИ=0,25с. 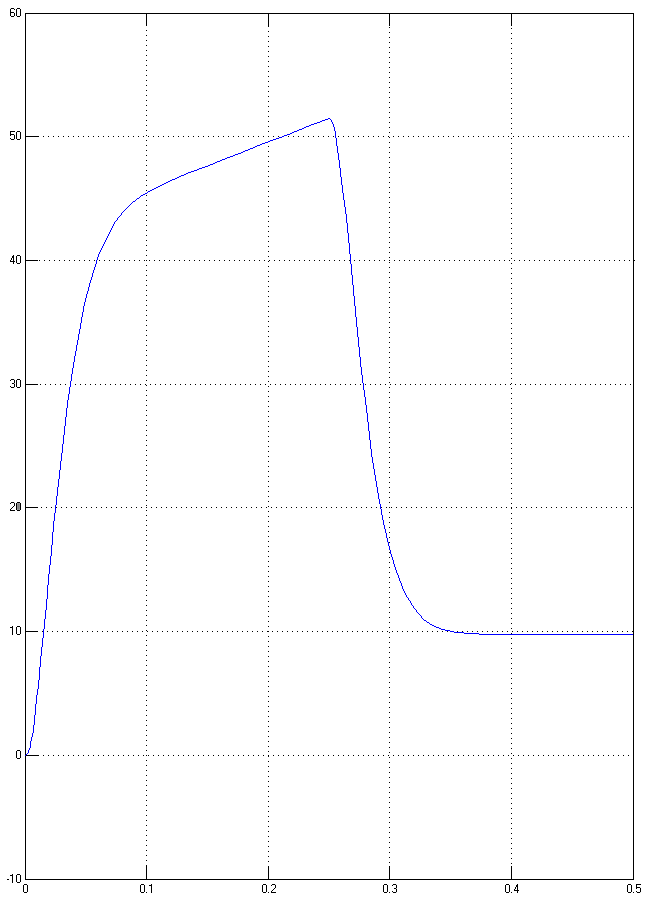 I A t c Рис. 7.5. График переходного процесса тока при пуске на холостом ходу с ЗИ, ТЗИ=0,25с. 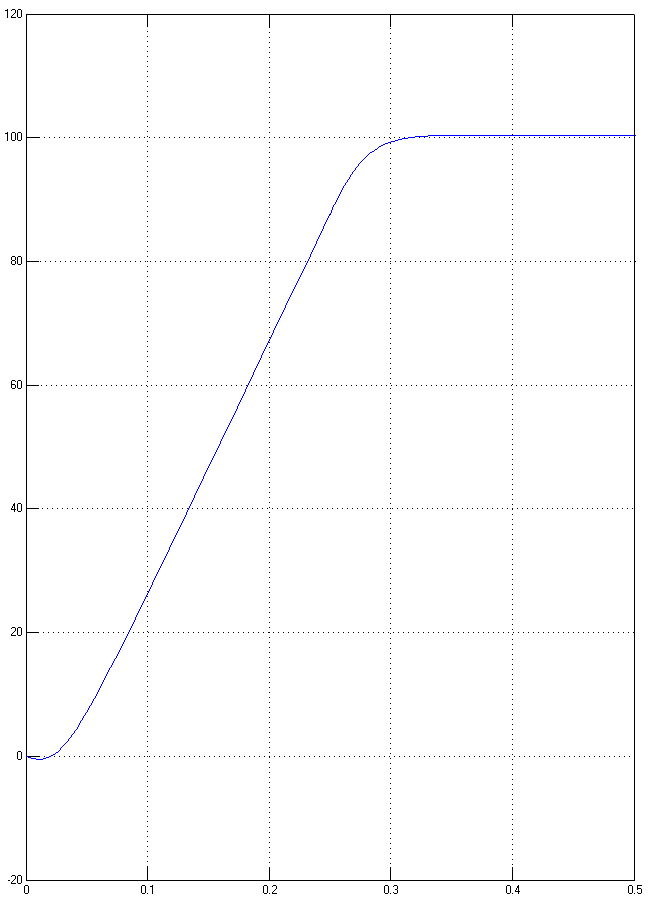 Ω 1/c t c Рис. 7.6. График переходного процесса скорости при пуске под нагрузкой с ЗИ, ТЗИ=0,25с. 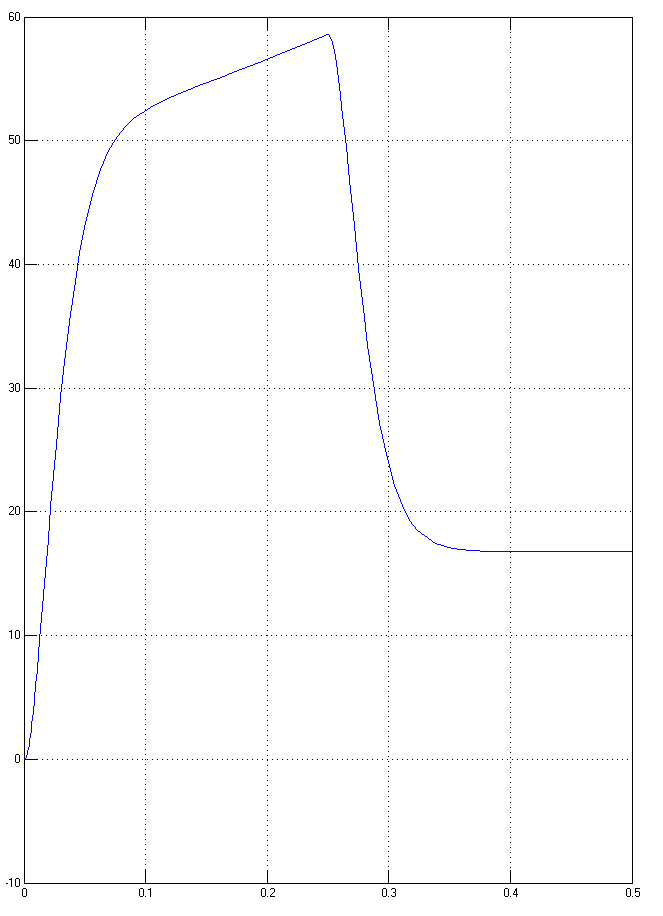 I A t c Рис. 7.7. График переходного процесса тока при пуске под нагрузкой с ЗИ, ТЗИ=0,25с. 8 Безопасность жизнедеятельности 8.1 Социальное значение безопасности жизнедеятельности На современном уровне развития научно-технического прогресса человеку часто приходится сталкиваться с различными машинами, механизмами, оборудованием, как на рабочем месте, так и в быту. С одной стороны научно-технические достижения облегчают физическую и умственную работу человека, что создает благоприятные условия для существования и развития человека. Но с другой стороны жизнь и здоровье человека при этом подвергаются различным опасностям. Повышение технической оснащенности предприятий приводит к увеличению несчастных случаев и профессиональных заболеваний на производстве, если не выполнять требования и нормы по охране труда. Создание здоровых и безопасных условий труда является важнейшей задачей специалистов ответственных за разработку, изготовление и эксплуатацию конкретного изделия. В данном разделе дипломного проекта рассматриваются вопросы охраны труда при эксплуатации электропривода механизма изменения вылета стрелы портального крана «Кондор». 8.2 Идентификация опасных и вредных производственных факторов Кран «Кондор» спроектирован и изготовлен на заводе «VEB Kranbau Eberswalde» в Германской Демократической Республике [1]. Кран предназначен для перегрузки контейнеров международного стандарта, штучных и навалочных грузов. Преимущественное применение крана для перегрузки контейнеров и штучных грузов определяет его конструктивные особенности. При эксплуатации крана по воздействию на человека, согласно ССБТ, факторы делятся на физические и механические. К физическим факторам относятся: 1) опасность поражения электрическим током; 2) опасность возникновения пожара; 3) наличие шумов, вибраций, СОЖ; К механическим относятся: движущиеся и вращающиеся части крана. 8.2.1 Опасность поражения электрическим током В условиях повсеместного использования электроэнергии особое значение приобретают автоматические меры защиты, которые предотвращают поражение человека электрическим током и аварийные режимы работы электроустановок, либо обеспечивают безопасность при возникновении аварий. Наибольшее число электротравм от 60 до 70% происходит на электроустановках до 1000В. Это объясняется широким распространением таких установок с одной стороны и низким уровнем подготовки персонала, эксплуатирующего эти установки. Допустимым значением электрического тока через тело человека при переменном токе является пороговый отпускающий ток 10 мА[21]. При протекании тока данной величины через тело человека – человек способен самостоятельно оторваться от токоведущей части, находящихся под напряжением. Проходя через живые ткани, электрический ток оказывает термическое, электролитическое, механическое и биологическое воздействия. Это приводит к различным нарушениям в организме, вызывая как местное поражение тканей и органов, так и общее поражение организма. Степень опасного и вредного воздействия на человека электрического тока зависит от ряда факторов: 1) Рода и величины тока и напряжения (постоянная и переменная составляющие тока оказывают совместное воздействие на организм человека); 2) Частоты электрического тока; 3) Пути тока через тело человека; 4) Продолжительности воздействия электрического тока на организм человека; 5) Массы человека. Причины поражения электрическим током: случайное прикосновение к токоведущим частям; напряжение шага; появление напряжения на корпусе оборудования; появление напряжения на отключенных токоведущих частях. 8.2.2 Опасность попадания человека под движущиеся части крана Движущиеся и вращающиеся части крана «Кондор» могут травмировать человека. Опасность представляют такие факторы как: вращение стрелы и поворотной колонны крана, перемещение крана. Попадание человека или его одежды на движущиеся и вращающиеся части механизмов могут привести к серьёзным травмам и даже гибели человека. 8.2.3 Наличие шума и вибрации Шумом принято называть всякий нежелательный звук. Шум как физический фактор – это движение звуковой волны, сопровождающиеся периодическим повышением и понижением давления. Именно на изменение давления в воздухе реагирует орган слуха. Человек воспринимает звуки в диапазоне 20 – 2000 Гц. Шум, не удовлетворяющий нормативным требованиям [26], оказывает влияние на весь организм человека: угнетает центральную нервную систему, вызывает изменение скорости дыхания и пульса, способствует нарушению обмена веществ, возникновению сердечно-сосудистых заболеваний, гипертонической болезни, может приводить к профессиональным заболеваниям. Сильный шум может быть причиной травматизма, так как из–за шума рабочий может не услышать сигналов, предупреждающих об опасности. Источниками шума при работе крана являются электродвигатели и редукторы, подшипники. В соответствии с ГОСТ 12.1.003-88 «Шум. Общие требования безопасности» предельно допустимое значение шума на рабочем месте производственного предприятия (L = 75 дБА). Кроме работающего крана в цеху других источников шума нет. Величина шума крана соответствует значению 72 дБА, что не превышает допустимого. В соответствии с ГОСТ 12.1.012-90 «Вибрационная безопасность» предельно допустимое значение вибрации на рабочем месте производственного предприятия (L = 95 дБА). Значение величины вибрации составляет Lв = 68 дБА, что не превышает допустимого. 8.3 Анализ опасных и вредных производственных факторов 8.3.1 Опасность поражения электрическим током Определение опасности поражения электрическим током сводится к определению тока через тело человека и сравнение его с допустимым током[21]. Опасное и вредное воздействие на людей электрического тока, электрической дуги и электромагнитных полей проявляются в виде электротравм и профессиональных заболеваний. Электропривод механизма изменения вылета стрелы крана получает питание от трехфазной четырехпроводной сети напряжением 380 В, частотой 50 Гц с глухозаземленной нейтралью. Для оценки поражения электрическим током при эксплуатации испытательной установки рассмотрим следующие ситуации: – прикосновение человека к фазному проводу, при нормальном режиме работы сети. 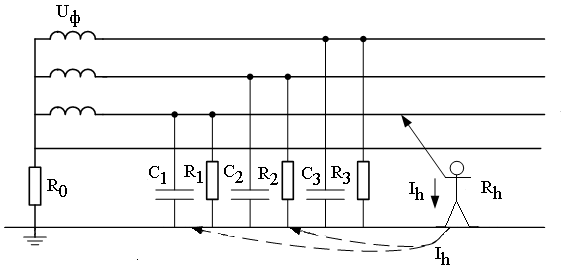 L1 L2 L3 PEN Рис.8.3.1 Прикосновение человека к фазному проводу трехфазной четырех - проводной сети с глухозаземленной нейтралью системы TN при нормальном режиме работы. Ток через тело человека определяется по формуле:  | ||||||||||||||||||||||||||||||||