Расчёт координат места судна-1. Вероятнейших координат местоположения судна по избыточным навигационным измерениям
 Скачать 3.07 Mb. Скачать 3.07 Mb.
|

|
3.1.1 Вычисление расстояний до ориентиров  : : = =  = =  = =  = 8.011242101 ≈ = 8.011242101 ≈ ≈ 8.011242 морских миль  = =  = =  = =  = 6.850547423 ≈ = 6.850547423 ≈ ≈ 6.850547 морских миль  = =  = = = =  = 8.062257748 ≈ = 8.062257748 ≈ ≈ 8.062258 морских миль  = =  = = = =  = 5.846366393 ≈ = 5.846366393 ≈ ≈ 5.846366 морских миль 3.1.2 Вычисление градиентов пеленгов  : : = 0.124824588 ≈ 0.12482 = 0.124824588 ≈ 0.12482 = 0.145973735 ≈ 0.14597 = 0.145973735 ≈ 0.14597 = 0.124034734 ≈ 0.12403 = 0.124034734 ≈ 0.12403 = 0.171046412 ≈ 0.17105 = 0.171046412 ≈ 0.171053.1.3 Вычисление направлений градиентов пеленгов  : : = 24.3° – 90° = 24.3° + 360°– 90° = 294.3° = 24.3° – 90° = 24.3° + 360°– 90° = 294.3° = 56.3° – 90° = 56.3° + 360°– 90° = 326.3° = 56.3° – 90° = 56.3° + 360°– 90° = 326.3° = 113.4° – 90° = 23.4° = 113.4° – 90° = 23.4° = 347.1° – 90° = 257.1° = 347.1° – 90° = 257.1°3.1.4 Вычисление переносов линий положения  : : = =  = 0.429873 ≈ 0.4299 = 0.429873 ≈ 0.4299 = =  = 0.333593 ≈ 0.3336 = 0.333593 ≈ 0.3336 = =  = 0.410147 ≈ 0.4101 = 0.410147 ≈ 0.4101 = =  = 0.280371 ≈ 0.2804 = 0.280371 ≈ 0.28043.1.5 Вычисление СКП линии положения  : : = 0.00349066 × 8.011242 = 0.027964522 ≈ 0.027965 = 0.00349066 × 8.011242 = 0.027964522 ≈ 0.027965 = 0.00349066 × 6.850547 = 0.023912930 ≈ 0.023913 = 0.00349066 × 6.850547 = 0.023912930 ≈ 0.023913 = 0.00349066 × 8.062258 = 0.028142601 ≈ 0.028143 = 0.00349066 × 8.062258 = 0.028142601 ≈ 0.028143 = 0.00349066 × 5.846366 = 0.020407675 ≈ 0.020408 = 0.00349066 × 5.846366 = 0.020407675 ≈ 0.020408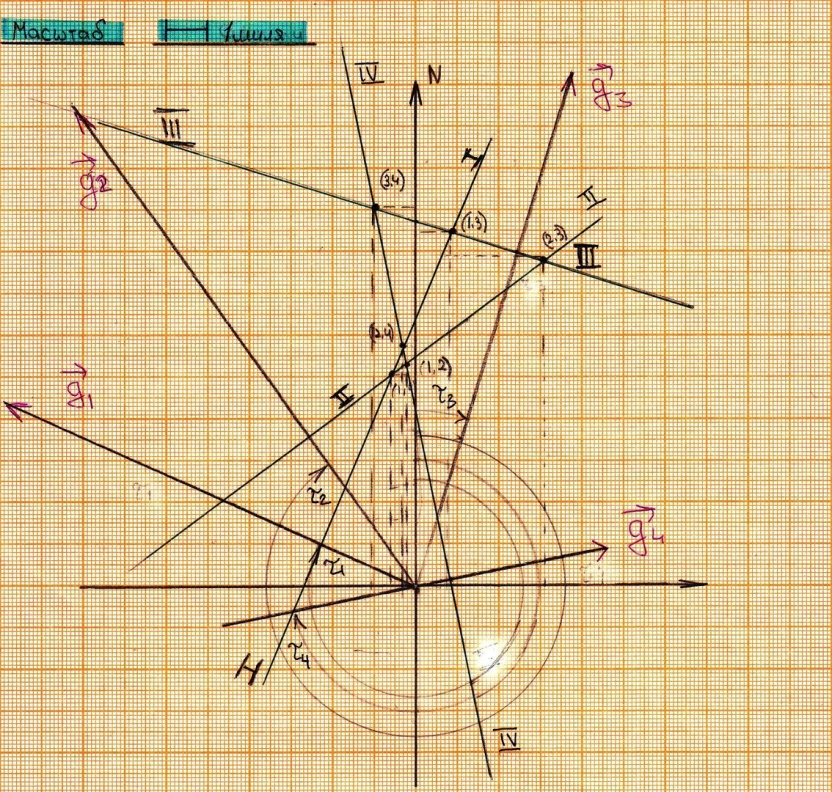 Рис.3.1.1 Графическое построение линий положения 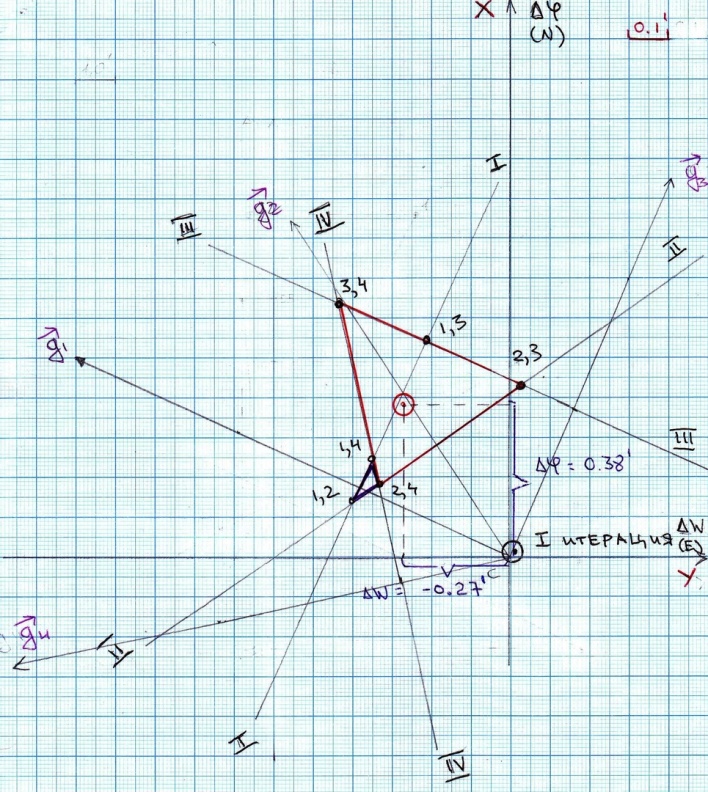 Рис.3.1.2 Масштабированное представление фигуры погрешностей (графическое определение координат места судна)  Рис.3.1.3 Иллюстративный показательный графоаналитический расчёт координат (не соответствует условиям задачи для использования в качестве примера оформления)
Приращения координат каждой вершины фигуры погрешностей  и и  снимаются с графика на (см. рис.3.1.2) с учётом принятого масштаба! снимаются с графика на (см. рис.3.1.2) с учётом принятого масштаба!3.1.6 Вычисление каждого угла пересечения двух линий положения  = =  : (угол пересечения брать острый!): : (угол пересечения брать острый!): = 326.3° – 294.3° = 32.0° = 326.3° – 294.3° = 32.0° = 23.4° + 360° – 294.3° = 89.1° = 23.4° + 360° – 294.3° = 89.1° = 294.3° – 257.1° = 37.2° = 294.3° – 257.1° = 37.2° = 23.4° + 360° – 326.3° = 57.1° = 23.4° + 360° – 326.3° = 57.1° = 257.1° – 326.3° = – 69.2° + 180° = 110.8°, 180° – 110.8° = 69.2° = 257.1° – 326.3° = – 69.2° + 180° = 110.8°, 180° – 110.8° = 69.2° = 257.1° – 23.4° = 233.7° – 180° = 53.7° = 257.1° – 23.4° = 233.7° – 180° = 53.7°3.1.7 Вычисление средней квадратической погрешности каждой точки пересечения двух линий положения  : : = =  = ==  = =  × × = == × 0.03679501 = 0.069435124  = =  = ==  = 1.000123383 × = 1.000123383 × = == 1.000123383 × 0.039674546 = 0.039679442  = =  = ==  = 1.653988528 × = 1.653988528 ×  = == 1.653988528 × 0.034619758 = 0.057260682  = =  = ==  = 1.191015175 × = 1.191015175 × = == 1.191015175 × 0.036930475 = 0.043984756  = =  = ==  = 1.069718157 × = 1.069718157 ×  = == 1.069718157 × 0.031437525 = 0.033629292  = =  = ==  = 1.240805196 × = 1.240805196 × = =1.240805196 × 0.034763701 = 0.043134980 3.1.8 Расчёт веса каждой точки пересечения двух линий положения  : : = =  = = = 207.4156726 = 207.4156726 = =  = =  = 635.1391561 = 635.1391561 = =  = =  = 304.9909602 = 304.9909602 = =  = =  = 516.8870193 = 516.8870193 = = = =  = 884.2285873 = 884.2285873 = =  = =  = 537.4533794 = 537.45337943.1.9 Вычисление средневзвешенных значений приращений координат относительно счислимой точки:  , ,   = + 0.37919229 ≈ + 0.38ʹ = + 0.37919229 ≈ + 0.38ʹ = – 0.272889539 ≈ – 0.27ʹ = – 0.272889539 ≈ – 0.27ʹ3.1.10 Расчёт обсервованных координат:
 =59°58.4'+0.37919229' =59°58.77919229'N=59°58'46.75''N =59°58.4'+0.37919229' =59°58.77919229'N=59°58'46.75''N (0. 77919229'×60''=46.7515374")  =69°44.4'W+2×0.272889539 W= =69°44.4'W+2×0.272889539 W==–69°44.4'–0.545779078'=69°44.945779078'W=69°44'23.56"W (0.945779078'×60''=56.74674468")
Примерный перечень вопросов при защите курсовой работы по МОС 1. Метод наименьших квадратов (МНК). Равноточные наблюдения. Геометрическая интерпретация. 2. МНК. Неравноточные наблюдения. 3. Вывод ко вариационной матрицы погрешностей. Правило переноса погрешностей. 4. Геометрическая интерпретация ковариационной матрицы погрешности. Собственные вектора и собственные значения. 5. Навигационные функции и изолинии. 6. Метод Ньютона для решения систем нелинейных уравнений. 7. Графо - аналитическое решение. Центрографическое уравнивание. 8. Апостериорная оценка точности. 9. Системы координат. Отшествие. 10. Что такое обсервация и зачем она нужна? 11. Что такое навигационный параметр? Примеры навигационных параметров. 12. Понятие навигационной изолинии. 13. Что такое линия положения? 14. Порядок определения места судна методом линий положения (графоаналитическое решение задачи). 15. Порядок определения места судна методом линий положения (аналитическое решение задачи). 16. Зачем применяется итерационная процедура для решения задачи определения места судна? 17. Зависит ли точность обсервации от градиентов навигационных параметров? 18. Как оценить точность места судна если для расчета обсервации использовался МНК? 19. Что такое ковариационная матрица погрешностей координат? 20. Геометрическая интерпретация ковариационной матрицы погрешностей координат. 21 . Какая разница между априорной и апостериорной оценками точности координат? 22. Что такое вес измерения? 23 Что такое графоаналитический метод расчета координат при избыточных навигационных измерениях? 24. Чем отличаются аналитический и графоаналитический МНК? 25. Уравнение линии положения в общем виде. 26. Есть ли в уравнении линии положения информация о модуле градиента навигационного параметра? 27. Общие формулы расчета параметров градиента навигационного параметра. 28. Как рассчитать направление градиента пеленга с судна на ориентир? 29. Если на навигационной карте нанесена сетка навигационных изолиний, как определить область наиболее точных линий положения? |







