теормех шпоры. Вопрос 1 Векторный способ задания движения
 Скачать 1.21 Mb. Скачать 1.21 Mb.
|

| Вопрос 20: Скорости и ускорения точек твердого тела при его свободном движении. Разложение общего вида движения на поступательное, связанное с точкой О и вращательное относительно О. Переносное движение - поступательное движение вместе с полюсом. (Ve) Относительное движение - вращательное движение относительно полюса. (Vr) Поступательное: X1o=f1(t); Y1o=f2(t); Z1o=f3(t). Вращательное: Ψ=f4(t); φ=f5(t); θ=f6(t). Таким образом, число степеней свободы при свободном движении твердого тела равно 6. ρA=ρо+rvA=dρ/dt+dr/dt=vo+ω×r. aA=dvA/dt=dvo/dt+dω/dt×r+ω×dr/dt=ao+ε×r+ω²r=ao+aAвр+aAос. 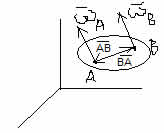 1) Полюс - т. А: vB = vA + ωS*AB 2) Полюс - т. В: vA = vB + ωB*BA = vB - ωB*AB 1) + 2) : (vB + vA) = (vA + vB) + ω*AB- ωB*AB (ωA - ωB)*AB = 0 | Вопрос 21: Сложное движение точки. Основные понятия. Сложное движение – движение по отношению к системе координат, выбранной за основную (абсолютную). Относительное движение – движение точки по отношению к подвижной системе координат. Переносное движение – движение подвижной системы координат относительно неподвижной. Установление связи между этимидвижениями позволяет решать различные задачи. Положение точки М в подвижной системе координат O'XYZ характеризует радиус-вектор Ускорение точки М в этом движении называется относительным ускорением и обозначается аr. Вектор аr характеризует скорость изменения вектора относительной скорости Vr в подвижной системе O'XYZ и поэтому выражается относительной, или локальной, производной по времени от Vr: Движение подвижной системы O'XYZ по отношению к неподвижной Oxyz является для точки М переносным движением, а скорость и ускорение той неизменно связанной с подвижной системой отсчета точки А, с которой в данный момент времени совпадает точка М, называют переносными скоростью и ускорением точки М и обозначают Ve и ае. Переносные скорость и ускорение точки М определяются по формулам: | Вопрос 22: Полная и локальная производные вектора. Формула Бура. Рассмотрим изменение вектора b(t) по отношению к двум системам координат — подвижной O'XYZ и неподвижной Oxyz.  Абсолютной, или полной, производной вектора b по аргументу t назьшается вектор Относительная, или локальная, производная Формула Бура (получается из зависимости между полной и локальной производными): Рассомтрим частные случаи. 1) угловая скорость = 0, то 2) вектор b не меняется в подвижной системе отсчета 3) Выведение формулы Бура: Найдем зависимость между полной и локальными производными. Если воспользоваться проекциями вектора b(t) на оси подвижной системы O'XYZ, то можно записать: | Вопрос 23: Скорости и ускорения точки при сложном движении. ρ = r0 + r dp/dt = d(r0+r)/dt = dr0/dt + dr/dt dp/dt = v0 + dr/dt + ω*r = v0 + vr + ω*r v = v0 + ω*r + vr = ve + vr a = dv/dt = d(v0 + ω*r +vr)/dt = a0 + (dω/dt)*r + ω*(dr/dt) + dvr/dt dr/dt = d()r/dt + ω*r = vr + ω*r dvr/dt = d()vr/dt + ω*vr = ar + ω*vr a = a0 + ε*r + ω*vr + ω*vr + ω*(r*ω) + ar + ω*vr = a0 + a(вр) + ω*vr + ω*vr + а(ос) + ar + ω*vr a = a0 + ε*r + ω*(r*ω) + ar + + 2*ω*vr, где 2*ω*vr - добавочное (поворотное) ускорение, a0 + ε*r + ω*(r*ω) - (ае) переносное ускорение. Опр-е ускорения точки в сложном движении VM=VO+[ ωr]+ Vr WM=dVM/dt=(dVO/dt)+[ εr]+[ ω(dr/dt)]+dVr/dt dr/dt=[ ωr]+ Vr WM=Wo+[ εr]+ [ω[ωr]]+[ ωVr]+ [ ωVr]+Wr dVr/dt=[ ωVr]+ Wr Wk=2[ωVr] WM=WL+Wr+WK – кинематическая теорема Кариолиса Абсолютное ускорение точки –это есть сумма переносного ускорения, относительного ускорения и ускорения Кариолиса Переносное ускорение хар-етизмен-е переносной скорости в переносном движении. Относительное ускорение хар-етизм-е относительнойскоростив в относительном движении. Ускорение Кариолисахар-етизм-е относительной скорости в переносном движении Ускорение Кариолиса. Согласно правилу векторного произведения, вектор ускорения Кариолиса┴пл-ти, в кот-й лежат вектора ω и Vr и направлена в ту сторону,что с конца этого вектора кратчайшее совмещение первого вектора ко второму ω к Vr кажется видным против хода часовой стрелки. | Вопрос 24: Ускорение Кориолиса. Правило Жуковского. Кинематическая теорема Кориолиса: абсолютное ускорение точки является векторной суммой трех ускорений - относительного, переносного и ускорения Кориолиса. Ускорение Кориолиса равно удвоенному векторному произведению угловой скорости переносного движения на относительную скорость точки: Кориолисово ускорение обращаетсяв нуль, когда: 1) переносное движение - поступательное, т.е. омега переносное равно нулю; 2) в те моменты времени, когда в относительном движении точка останавливается, например.при изменении направления относительного движения. Частные случаи: А) ω0 – смена знака Б) vr0 – относительный покой (смена знака движения). В) sin(ω,vr)0, ω||vr. Правило Жуковского: Кориолисово ускорение можно получить, спроецировав вектор радиальной скорости на плоскость, перпендикулярную вектору омега переносное, увеличив полученную проекцию радиальной скорости в 2*(омега переносное) раз и повернув ее на 90 градусов в направлении переносного вращения. | Вопрос 25: Сложное вращение твердого тела вокруг пресекающихся осей. В случае вращательных относительного и переносного движений твердого тела, когда оси их вращений пересекаются в точке О (рис. 7.2), абсолютное движение будет движением твердого тела вокруг неподвижной точки О (сферическим движением) с угловой скоростью, определяемой согласно  Нетрудно убедиться, что скорости всех точек, лежащих на линии, по которой направлен вектор угловой скорости, равны нулю. В самом деле, например, скорость находящейся на этой линии точки А тела Скорость любой точки М тела в данном случае можно определить так: Модули составляющих, а также абсолютной скорости точки М равны модулям соответствующих векторных произведений и могут быть вычислены по формулам: | Вопрос 26: Сложное вращение твердого тела вокруг параллельных осей. Если оси вращательных движений тела параллельны, то вектор результирующей угловой скорости ω тела в неподвижной системе координат будет коллинеаренωе и ωr. Положение мгновенной оси вращения тела как оси, проходящей в данный момент времени через точку Р – МЦС в плоскости П, перпендикулярной осям вращений, можно определить из анализа: vrP=ωr×OrP, veP=ωe×OeP, Or, Oe – точки пересечений П с соответствующими осями вращения. vP=veP+vrP=0veP= -vrPveP= vrPωrOrP=ωeOeP. В зависимости от взаимного расположения и численного значения векторов ωr и ωe можно выделить 3 случая сложения вращательных движений: А) При совпадении направлений векторов ωe и ωr абсолютное движение будет плоским. Абсолютная угловая скорость в этом случае будет иметь направление, совпадающее с направлениями её составляющих, а её модуль ω=ωr+ωe. Положение точки Р можно найти из пропорции ωe/OrP=ωrOeP=ω/OeOr. Скорость любой точки тела может быть найдена по формуле v=ω×PM. Б) При противоположных направлениях векторов ωe и ωr, когда ωr≠ωe, абсолютное движение будет плоским. Абсолютная угловая скорость имеет направление, совпадающее с направлением большей по модулю составляющей угловой скорости, а её модуль ω=|ωr-ωe|. Пропорции для нахождения точки Р имеют тот же вид, что и в пункте А. 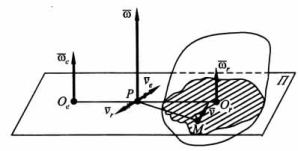 | Вопрос 27: Пара вращений. При противоположных направлениях векторов ωe и ωrи равенстве их модулей (ωe = ωr), если условие ωe=-ωr выполняется на отрезке времени t2-t1, абсолютное движение будет поступательным. Такой случай сложения вращательных движений называется парой вращений. Действительно, ω=ωe+ωr= -ωr+ωr=0, и для любой точки тела справедливы соотношения: v=ωe×r1+ωr×r2=ωe×(r1-r2)=ωe×OeOr=ωr×OrOe; Следовательно, скорости всех точек тела в данном случае одинаковы и равны скорости поступательного движения. | Вопрос 28: Аксиомы статики. 2 силы, приложенные к абс. твердому телу будут эквивалентны 0 тогда и только тогда, когда они равны по модулю, действуют на одной прямой и направлены в противоположные стороны. Следствие. Сумма всех внутренних сил всегда равна нулю. Действие данной системы сил на абсолютно твердое тело не изменится, если к ней добавить или отнять систему сил, эквивалентную 0 => точку приложения силы можно переносить вдоль линии её действия.  Если к телу приложены 2 силы, исходящие из одной точки, то их можно заменить равнодействующей (любую силу можно разложить на составляющие бесконечное число раз). Силы взаимодействия двух тел равны по модулю и противоположны по направлению. Механическое состояние системы не изменится, если освободить ее от связей, приложив к точкам системы силы, равные реакциям связей. Действие связей можно заменить действием сил – реакций связи. | Вопрос 29: Основные виды связей и их реакции. Связи – ограничения, накладываемые на свободное твердое тело (занимает произвольное положение в пространстве). Реакция связи направлена в сторону, противоположную той, куда связь не дает перемещаться телу. Гладкая поверхность – по общей нормали. Нить – вдоль к точке закрепления. Цилиндрический шарнир (подшипник) Сферический шарнир – по любому радиусу. Подпятник, подшипник – любое направление.  Невесомый стержень с шарнирами на концах. Реакция прямолинейного невесомого стержня с шарнирами на концах направлена вдоль оси стержня. В отличае от нити такой стержень может передавать как силы растяжения, так и силы сжатия.  Дополнительно: А) Скользящий; Б) Внутренний. | Вопрос 30: Система сходящихся сил. Условия равновесия. Система сил называется сходящейся, если линии всех сил пересекаются в одной точке. Попарно поочередно сложим эти силы, перенесенные к точке пересечения. Тогда R=∑Fk – главный вектор, так как R12=F1+F2, R13=R12+F3 и т. д. Rx=∑FixR=√(Rx²+Ry²+Rz²), cos(x,R)=Rx/R – аналитический способ задания. Условия равновесия. Система находится в равновесии когда главный вектор R=0. А) Векторная форма: R=∑Fk=0; Б) Аналитическая форма: Rx=Fkx=0, Ry=Fky=0, Rz=Fkz=0; В) Графическая форма: замкнут многоугольник сил. Система сходящихся сил эквивалентна одной равнодействующей силе, которую можно определить замыкающим вектором R* силового многоугольника, построенного на векторах-сипах системы сходящихся сил. Другими словами, равнодействующая системы сходящихся сил равна их геометрической сумме.  Многоугольник OABCD называется силовым многоугольником | Вопрос 31: Алгебраический и векторный моменты силы относительно точки. Алгебраическим моментом М=+-F*d( пара ). Он не меняется при перемещении сил вдоль линии их действия ( ни плечо, ни направления вращения не меняются). Векторный момент – вектор М=М(F,F*), направлен перпендикулярно плоскости пары в ту сторону, откуда видно стремление пары повернуть тело против часовой стрелки, его модуль равен алгебраическому моменту пары. Момент относительно точки. Алгебраическим моментом силы Fотносительно точки О называется взятое со знаком «+» или «-» произведение |F| на ее плечо: M0(F)=+-Fh. «+» - против часовой стрелки. Характеризует вращательный эффект F. Свойства: А) Не меняется при переносе точки приложения вдоль линии действия силы ( т.к. |F|sinA=const). Б) М=0 если т.О лежит на линии действия силы. Плоскость действия М -через F и О. Векторный момент силы Fотносительно точки О – вектор M0(F)=r*F (r–радиус вектор из А в О). |M0(F)=|F|*|r|*sinA=Fh.| ijk MO(F)= xAyAzA=> FxFyFz MOx(F)=yFz-zFy MOy(F)=zFx-xFz MOz(F)=xFy-yFx Теорема Вариньона - момент равнодействующий относительно какой-либо точки равен сумме моментов сил ее составляющих. | Вопрос 32: Момент силы относительно оси. Момент силы относительно оси – алгебраический момент проекции этой силы на ось, перпендикулярную оси z, взятого относительно точки A пересечения оси с этой плоскостью. Характеризует вращательный эффект относительно оси. Mz(F)=2SΔABC=F┴∙h. Если Mz(F)=0, то сила F либо параллельна оси z, либо линия её действия пересекает ось z. Второе правило определения момента силы относительно оси: Момент силы относительно оси называется произведение проекции силы на плоскость перпендикулярную оси на плечо этой проекции относительно точки пересечения плоскости с осью. Момент силы относительно оси Z: M0z(F) = ±hп * Fп Частные случаи: момент силы относительно оси = 0. а) Fп = 0  б) hп = 0 (сила пересекает ось) Момент силы относительно оси = 0, если сила и ось находятся в одной плоскости. Момент сил относительно декартовых осей координат (проекции момента силы на эти оси). | i j k | M0(F) = r * F = | x y z | = (y*Fz - z*Fy)*i + (z*Fx - x*Fz)*j + (x*Fy - | FxFyFz | y*Fx)*k = Mox(F)*i + Moy(F)*j + Moz(F)*k Mox(F)=y*Fz - z*Fy Moy(F)=z*Fx - x*Fz Moz(F)=x*Fy - y*Fx | Вопрос 33: Связь векторного момента силы относительно точки с моментом силы относительно оси, проходящей через эту точку. Момент силы F относительно оси z равен проекции на эту ось вектора момента силы Fотносительно произвольной точки О на этой оси. Доказательство: Пусть О – произвольная точка на оси z. Момент силы F относительно точки О перпендикулярен плоскости ОАВ MO(F)┴(OAB). Пусть угол междуMO(F) и осью z равен α. Тогда ПрzMO(F)=2SΔO’A’B’= 2SΔOAB∙cosα =>Mz(F) = |MO(F)|cosα. Ч.т.д. 2*S(OA'B') = 2*S(OAB)*cosα | Moz(F) | = | Mo(F) |*cosα MCOO = проекции на эту ось векторному МСОТ  | Вопрос 34: Аналитические выражения для моментов силы относительно осей координат. Используя связь момента силы относительно оси с векторным моментом силы относительно точки на оси, можно получить формулы для вычисления моментов относительно осей координат, если даны проекции силы на оси координат и координаты точки приложения силы. i j k MO(F)= xAyAzA=> FxFyFz MOx(F)=yFz-zFy MOy(F)=zFx-xFz MOz(F)=xFy-yFx По этим формулам получают необходимые знаки для MOx(F), MOy(F), MOz(F) если проекция силы Fна оси координат и координаты x,y,zточки приложения силы подставлять в них со знаками этих величин. При решении задач момент силы относительно какой-либо оси часто получают, используя его определение, т.е. проецируя силу на плоскость, перпендикулярную оси, и вычисляя затем алгебраический момент этой проекции относительно точки пересечения оси с этой плосколстью. | Вопрос 35: Пара сил. Теорема о сумме моментов сил, составляющих пару, относительно произвольной точки. Пара сил - система двух сил равных по модулю и противоположных по направлению. F1 = -F2 R* = F1 - F2 = 0 AC/F2 = BC/(R*) (стремится к бесконечности) (F1,F2) не эквивалентны 0 Момент пары сил - произведение одной из сил на ее плечо. M(F1,F2) = M12 = ±F1*d = ±F2*d Векторный момент пары сил.  MA = AB * F2 MA = F2 * AB * sinα = F2d MB = BA * F1 = F1 * d M = MA = MB = S(ACBD) Теорема о сумме моментов сил, составляющих пару, относительно произвольной точки: Сумма моментов сил, входящих в состав пары сил относительно любой точки не зависит от ее выбора и равна моменту этой пары сил. 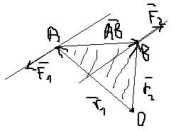 F1 = -F2 Mo(F2) + Mo(F1) = r2*F2 + r1*F1 = r2*F2 - r1*F2 = (r2 - r1)*F2 = AB * F2 = M(F1,F2) Теорема Пуассо: Произвольная система сил, действующих на твердое тело, можно привести к какому-либо центру О, заменив все действующие силы главным вектором системы сил R, приложенным к точке О, и главным моментом MO системы сил относительно точки О. Доказательство: Пусть О – центр приведения. Переносим силы F1, F2,…,Fn в точку О: FO=F1 +F2+…+Fn= ∑Fk. При этом получаем каждый раз соответствующую пару сил (F1,F1”)…(Fn,Fn”), Моменты этих пар равны моментам этих сил относительно точки О. M1=M(F1,F1”)=r1xF1=MO(F1). На основании правила приведения систем пар к простейшему виду MO=M1+…+M2=∑MO(Fk)= ∑rkxFk => (F1, F2,…,Fn) (R,MO) (не зависит от выбора точки О). | Вопрос 36: Векторный и алгебраический моменты пары сил. Алгебраический момент M=F∙d (пара). M=dF1=dF2=2SΔABC= Sٱ. Он не меняется при перемещении сил вдоль линии их действия (ни плечо, ни направление вращения не меняются). Векторный момент – вектор M=M(F,F’), направлен перпендикулярно плоскости пары в ту сторону, откуда видно стремление пары повернуть тело против часовой хода стрелки, его модуль равен алгебраическому моменту пары. M(F1,F2)=BAxF1=ABxF2. Моменты относительно точки. Алгебраическим моментом силы F относительно точки О называется взятое со знаком «+» или «-» произведение |F| на её плечо: MO(F)=Fh=2SΔOAB∙ MO(F). «+» - против часовой стрелки. Характеризует вращательный эффект F. Свойства: А) Не меняется при переносе точки приложения вдоль линии действия силы. (т.к. |F|sinα= const). Б) Ь=0 если т. О лежит на линии действия силы. Плоскость действия M – через F и O. Векторный момент силы F относительно точки О – вектор MO(F)=rxF (r – радиус- вектор из А в О). |MO(F)|=|F|∙|r|∙sinα=Fh. ijk MO(F)= xAyAzA=> FxFyFz MOx(F)=yFz-zFy MOy(F)=zFx-xFz MOz(F)=xFy-yFx | Вопрос 37: Эквивалентность пар. Сложение пар. Условия равновесия пар сил. Эквивалентность: А) 2 пары, имеющие равные моменты, эквивалентны. Пару сил можно перемещать, поворачивать в плоскости действия, перемещать в параллельную плоскость, менять одновременно силу и плечо. Б) 2 пары, лежащие в одной плоскости, можно заменить на одну пару, лежащую в той же плоскости с моментом, равным сумме моментов этих пар. M=M(R,R’)=BA×R=BA×(F1+F2)=BA×F1+BA×F2. При переносе сил вдоль линии действия момент пары не меняется BA×F1=M1, BA×F2=M2, M=M1+M2. СЛОЖЕНИЕ. 2 пары, лежащие в пересекающихся плоскостях, эквивалентны 1 паре, момент которой равен сумме моментов двух данных пар. Дано: (F1, F1’), (F2, F2’) Доказательство: Приведем данные силы к плечу АВ – оси пересечения плоскостей. Получим пары: (Q1,Q1’) и (Q2,Q2’). При этом M1=M(Q1,Q1’)=M(F1, F1’), M2=M(Q2,Q2’)=M(F2, F2’). Сложим силы R=Q1+Q2, R’=Q1’+Q2’. Т. к. Q1’= - Q1, Q2’= - Q2R= -R’. Доказано, чтосистемадвухпарэквивалентнасистеме (R,R’). M(R,R’)=BA×R=BA×(Q1+Q2)= BA×Q1+BA×Q2=M(Q1,Q1’)+ M(Q2,Q2’)=M(F1,F1’)+ M(F2,F2’) M=M1+M2. УСЛОВИЯ РАВНОВЕСИЯ: Система находится в равновесии, если суммарный момент всех пар сил, действующих на тело, равен нулю. M1+ M2+…+Mn=0. | Вопрос 38: Лемма о параллельном переносе силы. Сила, приложенная к какой-либо точке твердого тела, эквивалентна такой же силе, приложенной к любой другой точке тела, и паре сил, момент которой равен моменту данной силы относительно новой точки приложения.  Доказательство: пусть дана сила F. Приложим к какой-либо точке В систему F’ и F”. |F|=|F’|=|F”|. F(F,F’,F”), т.к. (F’,F”) 0, то F (F,F’,F”) (F,F’,F”) (F’,M(F,F”)). НоM(F,F”)=BAxF=MB(F). Получаем: F (F’,M(F,F”)) Ч. т. д. | Вопрос 39: Теорема о приведении произвольной системы сил к силе и паре сил - основная теорема статики. Теорема Пуассо: Произвольная система сил, действующих на твердое тело, можно привести к какому-либо центру О, заменив все действующие силы главным вектором системы сил R, приложенным к точке О, и главным моментом MO системы сил относительно точки О.  Доказательство: Пусть О – центр приведения. Переносим силы F1, F2,…,Fn в точку О: FO=F1 +F2+…+Fn= ∑Fk. При этом получаем каждый раз соответствующую пару сил (F1,F1”)…(Fn,Fn”), Моменты этих пар равны моментам этих сил относительно точки О. M1=M(F1,F1”)=r1xF1=MO(F1). На основании правила приведения систем пар к простейшему виду MO=M1+…+M2=∑MO(Fk)= ∑rkxFk => (F1, F2,…,Fn) (R,MO) (не зависит от выбора точки О). При приведении системы сил к заданому центру возникает главный вектор R равный сумме всех сил и главный момент Мо, равный сумме моментов всех сил относительно центра приведения. | Вопрос 41: Главный вектор и главный момент системы сил. Пусть дана система сил (F1, F2,…,Fn). Главным вектором системы сил называется вектор, равный векторной сумме этих сил. R=∑Fk. Rx=∑Fkx; cos(x,R)=Rx/R; Ry=∑Fky; cos(y,R)=Ry/R; Rz=∑Fkz; cos(z,R)=Rz/R;  Главный момент системы сил – сумма моментов сил относительно какого-либо полюса (центра приведения). Lx=∑Mx(Fk) R0 - главный вектор L0 - главный пучок моментов сил Главный вектор не зависит от точки приведения, а главный момент зависит. Главный момент системы сил относительно точки О называют сумму векторных моментов всех сил системы относительно этой точки. | Вопрос 42: Условия равновесия произвольной системы сил. Частные случаи. R=0 и Lo=0 –ур-я равновесия. Им соотв-ют 6 скалярных алгебраических ур-1 равновесия для простр.системы сил: Fkх=0 Fkу=0 Fkz=0 Мх(Fk)=0 Му(Fk)=0 Мz(Fk)=0 – аналитическое условие равновесия для произвольной системы сил. Пусть все силы пл-тихоу, тогда: Fkх=0 Fkу=0 Мо(Fk)=0 условие равновесия для произвольной плоской системы сил. Условие равновесия для плоской системы параллельных сил. Пустьсилы оси оу, тогда Fkх=0 Мо(Fk)=0 Условие равновесия для пространственной системы параллельных сил. F1, F2, F3,…,Fn оси оz, тогда: Fkz=0 Мх(Fk)=0 Му(Fk)=0 |