Введение Эксплуатационная часть
 Скачать 2.31 Mb. Скачать 2.31 Mb.
|

2.2.4 Устройство счета осейИспользование надежных, не требующих частой регулировки устройств счета осей УСО позволяет снизить трудозатраты на техническое обслуживание, а так же финансовые затраты. УСО предназначено для распознавания осей вагонов и определения направления их движения, при этом производить контроль исправности элементов устройства. Устройство считывания осей состоит из: - индуктивного датчика ИД, располагаемого на путях; - преобразователя сигналов, установленного в путевом ящике. Индуктивный датчик представляет собой многоконтурный обнаружитель, который позволяет обнаруживать подвижной состав и фиксировать направление его движения. ИД состоит из двух частей: - первичного преобразователя датчика; - преобразователя сигналов ПС (в напольном ящике). Первичный преобразователь датчика представляет собой совокупность трех катушек индуктивности без сердечника КИ1, КИ2, КИ3, который прикрепляется к рельсу. Катушки КИ1 и КИ3 (рабочие), располагаются в корпусе горизонтально, их плоскости намотки параллельны рельсу, а третья, вспомогательная, располагается между ними и ее плоскость перпендикулярна плоскости других катушек индуктивности. В результате преобразователь сигнала датчика строится по трехканальной схеме. Два канала ПС (рабочие), выполняют функции счетчиков осей движущегося вагона. Они симметричны и включают в себя: - резонансные каскады РК1 и РК2; - компараторы сигналов К1 и К2; - дискретные делители частоты сигнала Д2 и Д4; - каскады оптоэлектронной развязки ОР1 и ОР3; - индикаторы состояния каналов И1 и И3; - выходные цепи передачи сигналов на пост ЭЦ – ВЫХ.СЧ1 и ВЫХ.СЧ.2. Третий канал имеет функции контроля работоспособности датчика и включает в себя те же функциональные узлы, что и основные каналы. Ориентация индуктивности катушек датчика такова, что колесные пары вагона поочередно проезжают над катушкой КИ1, а затем над катушкой КИ3 в одном направлении, либо наоборот при обратном движении. В момент проезда колесной пары над соответствующей катушкой, регистрируется сигнал с соответствующего счетного выхода одного из каналов СЧ1, или СЧ2. Фиксация направления движения транспортного средства происходит в зависимости от очередности во времени появления счетных импульсов с выхода первой или второй катушек КИ1, КИ3.  Рисунок 2.7 – Функциональная схема УСО-М На посту ЭЦ в управляющем вычислительном комплексе ведется обработка поступающих с датчиков сигналов по алгоритму счета осей колесных пар, определению направления движения отцепа, занятости или свободности контролируемого участка. Работа вспомогательного канала, который регистрирует исправное состояние датчика, не прекращается даже при въезде колесной пары в зону действия датчиков. Преобразователь сигналов состоит из ячеек преобразования сигналов датчиков (18 штук), блока преобразователей ПС1, ячейки контроллера преобразователя сигналов КПС. В блоке преобразователей ПС1 размещено следующее оборудование: - ячейка контроллера преобразователя сигналов КПС, совмещенная с блоком питания преобразователей; - ячейки преобразователя сигналов датчиков ПС50М1.  Рисунок 2.8 – Структурная схема преобразователя сигналов 2.2.5 Управление стрелочным электроприводом СПГБ-4БСтрелочные электроприводы необходимы для перевода, запирания и контроля положения стрелок электрической, диспетчерской и горочной централизации. Электроприводы устанавливают с правой или левой стороны стрелочных переводов на специальных гарнитурах. Стрелочный перевод СПГБ предназначен для перевода централизованных стрелок в повторно-кратковременном режиме, запирания и контроля положения их в непрерывном режиме. С июля 1995 года Брянским заводом был начат серийный выпуск бесконтактного горочного электропривода СПГБ-4Б, который пришел на смену СПГБ-4М. СПГБ-4Б относится к электромеханическим, с внутренним запиранием, быстродействующим, невзрезным, бесконтактным электроприводам. Высокое быстродействие достигается сочетанием максимального управляющего воздействия по напряжению с уменьшенным передаточным числом редуктора до 35,7 за счет уменьшения числа зубьев шестерен в первом каскаде редуктора [2]. В корпусе (1) электропривода расположены: - электродвигатель (8); - уравнительная муфта (7); - редуктор (6); - зубчатое колесо с упором (5); - блок главного вала с бесконтактным автопереключателем (4); - контрольные линейки (3); - шибер (2); - блокировочное устройство (9). 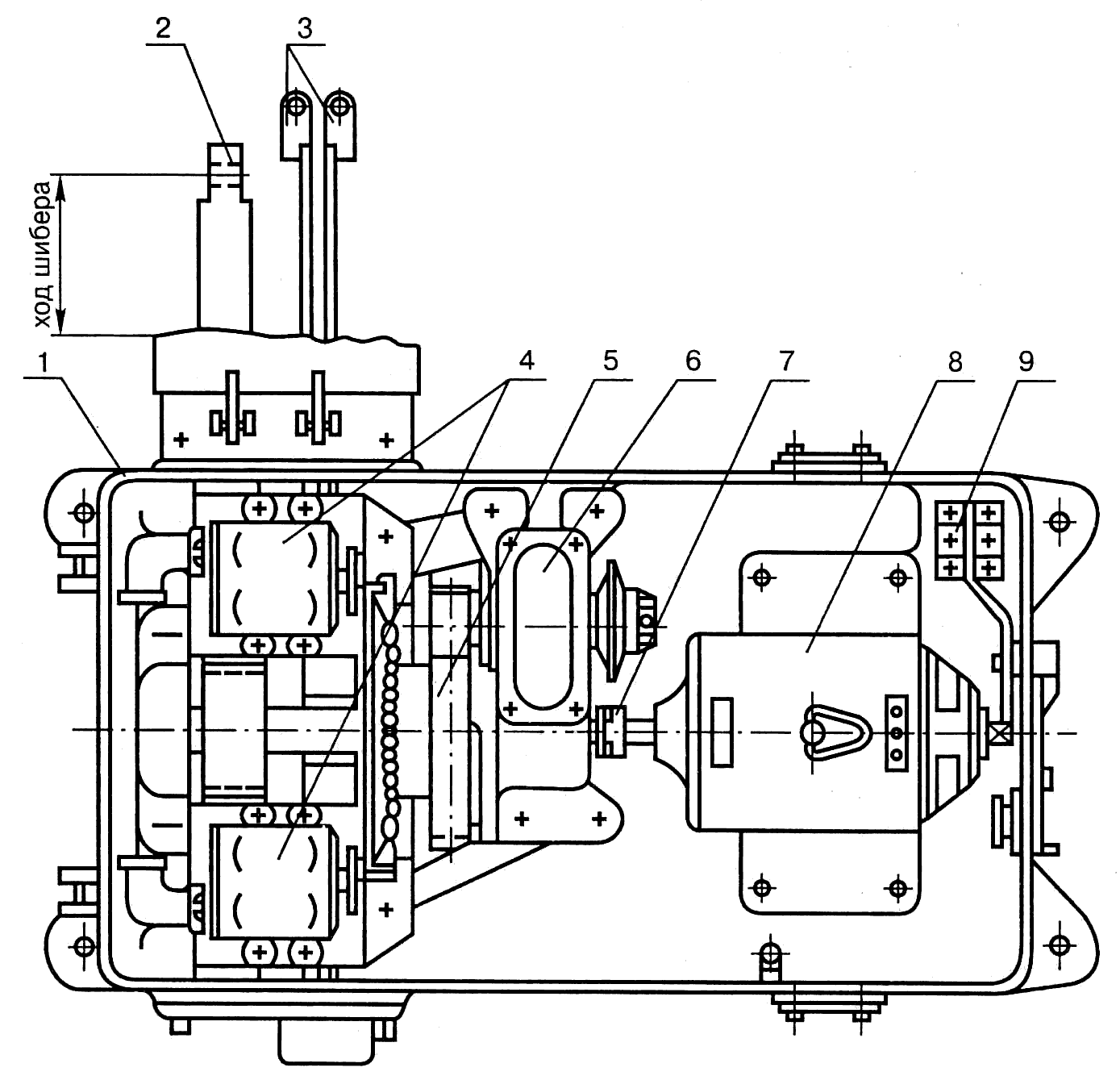 Рисунок 2.9 – Электропривод стрелочный бесконтактный типа СПГБ-4Б Горочные электроприводы СПГБ имеют бесконтактные автопереключатели. Каждый датчик автопереключателя заключен в литой корпус, внутки которого находится трехполюсной статор (1) и ротор-сектор (2), который вращается за счет поводка. На полюсах статора располагаются питающая (4) и компенсационная (5) обмотки (на них подается напряжение питания), а так же сигнальная (3), с которой снимается выходное напряжение.  Рисунок 2.10 – Схема бесконтактных датчиков Угол поворота ротора-сектора изменяется поводком, положение которого может быть проверено по шкале на крышке датчика. При втянутом положении шибера ротор-сектор левого датчика обеспечивает контроль переведенного положения (повернут на угол 120º±5º), а ротор-сектор правого датчика – контроль начального положения (занимает исходное положение, угол 0º±5º). При взрезе стрелочного перевода ротор-сектор повернут на угол 60º±10º и выполняет контроль среднего положения. С помощью этих датчиков производится контроль положения стрелки и определение неисправности по причине взреза.  Рисунок 2.11 – Принципиальная схема бесконтактного автопереключателя Выпускающийся в настоящее время электропривод СПГБ-4Б, согласно действующим техническим условиям, должен обеспечивать потерю контроля положения стрелки: - при рассоединении одной из контрольных тяг с остряком, последовавшего после появления дефекта перевода стрелки и возвращения затем стрелки в исходное положение; - при ходе линейки ближнего остряка на 10 мм больше хода шибера; - при изгибе контрольной тяги отжатого остряка и частичном вытягивании при этом линейки дальнего остряка из корпуса на величину более 25 мм; - при переводе после этого стрелки в другое крайнее положение (шибер выдвинут) контроль положения стрелки должен отсутствовать, если предварительное вытягивание линейки дальнего остряка из корпуса не превышает 360 мм [2]. Электроприводы выпускаются в различных модификациях в зависимости от типа электродвигателя и варианта сборки (в зависимости от места расположения привода относительно пути). Горочные бесконтактные электроприводы СПГБ-4Б оборудуются электродвигателем постоянного тока типа МСП-0,25. Номинальная мощность этого двигателя составляет 250 Вт, напряжение питания 100 В. Для ускорения перевода стрелки, на сортировочных горках, на двигатель подается напряжение от 200 до 220 В, что увеличивает мощность электродвигателя до 740 Вт, но при этом приводит к увеличению износа коллектора. Применение такого режима работы на головных стрелках приводит к частому межремонтному обслуживанию этих двигателей. Каждые три месяца производится замена двигателей с дальнейшим их обслуживанием. Проведение таких частых ремонтных работ приводит к экономическим и технологическим расходам, что противоречит планам стратегического развития ОАО «РЖД» до 2030 года. Для достижения поставленных целей необходимо провести модернизацию стрелочных переводов с минимальными расходами. Это достижимо применением современного оборудования, а именно электродвигателя вентильно- индуктивного ЭМСУ. ЭМСУ предназначен для работы в составе стрелочных электроприводов взамен существующих двигателей постоянного тока серии ДСП (МСП) и асинхронных двигателей трехфазного переменного тока типа МСА (МСТ). Двигатель имеет микропроцессорную систему управления, которая позволяет ему быть универсальным по питающему напряжению и частоте вращения. Частота вращения ротора настраивается в зависимости от типа стрелочного перевода, как на заводе, так и самостоятельно в условиях эксплуатации. Работа ЭМСУ в стрелочных переводах осуществляется от серийных схем управления ЭЦ и не требует пересчета кабельных сетей [3]. Для эксплуатации на сортировочных горках существует модификация ЭМСУ-СПГ и ЭСМУ-ФГ. Данные двигатели способны полностью заменить МСП-0,25 и ДСП-0,55. Особенность замены этих двигателей заключается в снижении эксплуатационных затрат, конструкция ЭМСУ-СПГ позволяет иметь всего одну технологию обслуживания в условиях эксплуатации, независимо от типа питающего напряжения. Так же электродвигатель не требует технического обслуживания в РТУ дистанции в течение 7 лет и его ресурс составляет 1,5·106 переводов. Двигатели серии ЭМСУ-СПГ и ЭСМУ-ФГ выпускаются запрограммированными на 3000±15% об/мин. Его мощность составляет 925 Вт. КПД= не менее 75%. 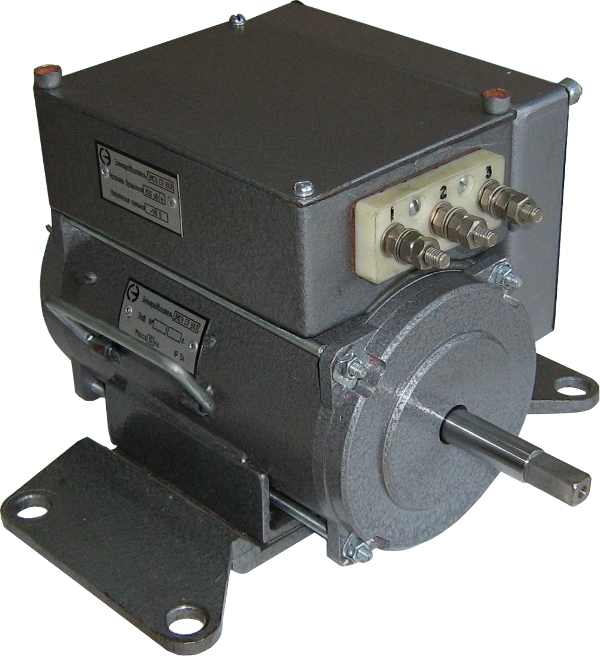 Рисунок 2.12 – Внешний вид электродвигателя ЭМСУ Таблица 2.1 - Сравнительная характеристика горочных электродвигателей
2.2.6 Горочные светофорыГорочные светофоры (Г1, Г2) располагаются в зоне вершины горки (ВГ) у каждого пути роспуска составов. В зависимости от возможной скорости роспуска горочные светофоры Г подают сигналы: - один зеленый огонь - разрешается роспуск состава с установленной скоростью; - один желтый огонь – разрешает роспуск состава с уменьшенной скоростью; - один желтый и зеленый огни – разрешается роспуск состава со скоростью, промежуточной - между установленной и уменьшенной. Красный огонь требует остановки состава («Стой!»), а при дополнительном включении маршрутного указателя с буквой «Н» — осаживания состава от вершины горки [8]. Для маневровых передвижений на пути сортировочного парка светофоры дополняют лунно-белыми огнями. Передвижения из сортировочного парка к вершине горки регулируют маневровые светофоры (МГ1-МГ10), которые используют также для ограждения замедлителей при ремонтных работах. Горочными светофорами управляют в автоматическом режиме или посредством группы блокированных кнопок, при нажатии которых включаются реле сигнальных показаний Ж, З и Н. Схема включения ламп светофоров Г1, Г2 обеспечивает, кроме включения указанных сигнальных показаний, сигнализацию желтым и красным огнями соответственно при перегорании лампы зеленого и желтого огня [4]. 2.2.7 СкоростемерыСкоростемер является стационарным техническим устройством радиолокационного принципа действия и необходим для измерения скорости движения скатывающихся отцепов. Устройство монтируются на опорах сбоку от рельсового пути либо внутри колеи. Радиолокационные индикаторы скорости типа РИС-ВЗМ используются для измерения скорости отцепов на автоматизированных железнодорожных сортировочных горках. Диапазон измеряемых скоростей составляет от 1,5 до 35 км/ч. Этот диапазон может быть расширен программным путём до 0,4 – 46 км/ч. Работа скоростемера РИС-ВЗМ основывается на эффекте Доплера, его принцип состоит в том, что при перемещении наблюдателя относительно источника СВЧ колебаний и наоборот, частота колебаний в месте наблюдения отличается от частоты источника колебаний. При этом приращение частоты пропорционально радиальной составляющей скорости движения. Эффект выражается формулой:  , (2.2) , (2.2)где fдоп – доплеровская частота; fo – частота излучаемого сигнала; V – скорость движения подвижной единицы; c – скорость света; α – угол между наплавлением излучения и вектором скорости объекта. С помощью приемопередающего модуля моделируется СВЧ-сигнал, который излучается антенной в направления движущегося отцепа, после этой же антенной воспринимается отраженный от объекта сигнал. Доплеровская частота генерируется приемопередающим модулем в виде гармонических колебаний и поступает в блок обработки, где происходит его усиление, фильтрация, преобразование в цифровой вид, обработка в цифровом виде, а далее снова преобразуется в аналоговый вид и уже в форме меандра поступает на выход РИС-В3М. Скоростемер РИС-В3М основывается на алгоритме скользящего и быстрого преобразования Фурье (БДП). Это привело к тому, что максимальное время преобразования не превышает 10 мс. Спектральное преобразование доплеровского сигнала позволяет использовать максимальное количество полезной информации о сигнале и минимизировать действие помех. Зона действия скоростемера начинается на расстоянии 3-4 места до замедлителя, при подъезде отцепа к тормозным позициям уже имеется устойчивый сигнал в виде доплеровской частоты импульсной формы, соответствующей скорости объекта. Контроль работоспособности РИС-В3М ведётся непрерывно в реальном режиме времени. При штатном функционировании датчика, на его частотном выходе всегда присутствует переменный сигнал независимо от наличия отцепа в зоне его действия. РИС-В3М устойчиво работает в тяжелых вибрационных условиях (от 10 до 70 Гц с ускорением до 3,8 g), при этом сохраняет работоспособность в условиях дождя, тумана, инея и росы. При соблюдении правил эксплуатации излучаемое СВЧ излучение не представляет опасности обслуживающему персоналу. 2.2.8 Весомеры Весомер производит преобразование давления колеса вагона на рельс в электрический сигнал. Он обеспечивает выдачу результатов поколесного взвешивания отцепов. Весомеры применяются в системах регулирования скорости скатывания отцепов для предварительного определения ступени торможения отцепов, въезжающих на замедлители. Так как весомеры имеют низкую точность измерения веса вагонов, поэтому с их помощью определяется только весовая категория. Весомеры размещаются на пути перед верхней тормозной позицией и распространены два типа: - механический - представляющий собой рельсовую вставку длиной около 3,5 м, в средней части которой срезана часть головки рельса, а в полученном пазу установлен мостик — силоизмерительная пружина из закаленной рессорной стали. На рельсовой вставке укреплена контактная коробка, в которой размещены шесть пар контактных пружин. Мост и контактный рычаг связаны между собой подвижным рычагом. При въезде колесной пары вагона на рельсовую вставку весомера мостик прогибается и приводит в действие нажимной рычаг, приводящий в движение контактный со связанными с ним контактами. Перемещаясь, рычаг последовательно включает контактные группы, каждая из которых откалибрована на соответствующую весовую категорию: Л (легкая), ЛС (легко-средняя), С (средняя) и СТ (средне-тяжелая), Т (тяжелая), ОТ (очень тяжелая). Замыканием одной или нескольких контактных групп выдается электрический сигнал о соответствующей весовой категории. - тензометрический - датчик, устанавливаемый на специально подготовленной рельсовой вставке длиной 5—6 м, укладываемой на специальной металлической платформе, прикрепленной к шпалам. Принцип действия основан на измерении упругой деформации шейки рельса под действием нагрузки от колес подвижного состава. Тензорезистор преобразует деформацию рельса в электрический сигнал. Существенным недостатком тензовесомеров является то, что они отличаются невысокой точностью, погрешность составляет 5—10 %, а так же нет возможности в случае поломки произвести ремонт. Смена датчика требует замены рельсовой вставки с датчиком. 2.2.9 Контроль заполнения путей Заполнение путей в подгорочном парке является неотъемлемой частью сортировочного процесса и напрямую влияет на производительность сортировочной станции. Это связано с проблемой контроля заполнения путей подгорочного парка. В настоящее время контроль осуществляется с помощью устройств контроля заполнения путей КЗП. Они выполняют функции определения длины свободного пробега отцепа от парковой тормозной позиции до стоящих на пути вагонов. Информация о наполненности путей позволяет корректировать сортировочный план роспуска отцепов. КЗП основывается на напольных устройствах, к которым предъявляется череда требований: - фиксировать присутствие вагонов на контролируемом участке в условиях пониженного сопротивления балласта (изоляции) независимо от сопротивления рельсовой линии и переходного сопротивления «колесо-рельс»; - контролировать наличие вагонов на отдельном участке сортировочного пути независимо от наличия вагонов на смежных участках; - использовать минимальное число жил кабеля (2-х проводные или 4-х проводные линии связи с центральным устройством); - не препятствовать механической уборке снега, чистки пути и подбивке балласта; - являться простой в обслуживании (не требуется высококвалифицированный персонал); - проводить циклический опрос состояния всех контролируемых участков пути, при этом время обновления должно быть менее 1с, так же данные должны храниться и передаваться на центральный пост по последовательному каналу связи. Все отечественные устройства КЗП по принципу работы разделяются на два типа: - первый - для формирования сигнала использует рельсовые нити; - второй - построен на основе независимых датчиков обнаружения подвижного состава. 2.2.9.1 Контроль заполнения путей с использованием рельсовых цепей Данный тип КЗП, для определения подвижного состава, использует короткие нормально разомкнутые рельсовые, путевые реле которых управляют измерительной линией. Зона протяженностью 300-375метров каждого подгорочного пути от третьей тормозной делится на 12-15 контрольных участков. Рельсовые цепи этих участков подключаются к питающей магистрали (220 В), которая проложена вдоль путей. К этой же магистрали подключены первичные обмотки измерительных трансформаторов ИТр, а их вторичные обмотки включены последовательно в измерительную цепь.  Рисунок 2.13 – Система КЗП на базе нормально- разомкнутых РЦ В зависимости от места нахождения последнего вагона контакты путевого датчика изменяют параметры измерительной цепи, это приводит к тому что на ее выходе устанавливается суммарное напряжение, пропорциональное количеству свободных контрольных участков пути. Это напряжение подводится к переходному трансформатору и с его вторичной обмотки передается в преобразователь, где переводится в соответствующее дискретное число. Оно фиксируется с помощью реле (триггерах) статического контроля заполнения путей. Все приборы рельсовых цепей размещаются в трансформаторных ящиках в междупутье подгорочного парка. В одном ящике располагаются приборы для двух соседних путей (к четырем рельсовым цепям). Связь ящиков и поста осуществляется через пятижильный кабель. Точность производимых измерений свободной части пути составляет 25 метров. Главным преимуществом данной схемы является то, что она не подразумевает большого расхода кабеля и является надежной, потому что работает с нормально-разомкнутыми рельсовыми цепями. Но при этом наличие большого количество изолирующих стыков приводит к усложнению в обслуживании устройств, так же при уборке снега возникают затруднения по причине расположения в междупутье трансформаторных ящиков. Еще одним недостатком стоит отметить тот факт, что при использовании данной схемы нет возможности выявить свободные мета между вагонами именно поэтому в дальнейшем разрабатывались схемы без изолирующих стыков и с меньшим количеством напольного оборудования. 2.2.9.2 Контроль заполнения путей с использованием бесстыковых высокочастотных рельсовых цепей Первый метод способен измерять только свободную часть пути. Весь путь делится на контролируемые участки, к началу подключены высокочастотные генераторы, а в конце - приемники частоты генератора (их концы закорочены). Включая по отдельной кодовой многопроходной линии связи последовательно приемники, фиксируется прием частоты генератора на приемном конце рельсовой линии. Второй метод позволяет измерять свободные участки пути и отслеживать передвижение отцепов по занятым частям. В начале каждого второго участка к рельсовой линии подключаются два генератора с разной частотой. Они разделяются изолирующим стыком на одной из нитей. Таким же образом, устанавливаются приемники частотных сигналов, но стыками не разделяются. Это позволяет реализовать чередование частот в смежных участках. Всем методам использующие рельсовые цепи присуще основные недостатки и надежность работы аппаратуры зависит от: - исправности рельсовых соединителей; - сопротивления балласта путей; - качества электрических соединений кабелей к рельсу; - сопротивления поездного шунта. 2.2.9.3 Бесстыковой контроль заполнения путей В одном из видов бесстыкового КЗП применяется следующая схема построения. В начале пути контроля к рельсовым нитям подключается генератор Г, который вырабатывает переменный ток, частотой 1000 Гц с амплитудой 6 А. В конце этого участка устанавливается перемычка (шунт). Амплитуда тока постоянна, при этом не зависит от состояния балласта, свободности или занятости пути.  Рисунок 2.14 – Бесстыковой КЗП на основе сравнения напряжений Одна из рельсовых нитей поделена на небольшие участки (длиной около 30 м), что равно двойной длине четырехосного вагона. Выбор число участков и их протяженности производится исходя из необходимой точности измерения длины свободного пробега отцепов. С двух (смежных) участков рельса снимаются напряжения. Эти напряжения подаются на входы путевых приемников (1ЭП и 2ЭП, 2ЭП и 3ЭП, …, 11ЭП и 12ЭП). При этом для одного из входов напряжение, передающееся с предыдущего участка, является запирающим, а для другого входа напряжение будет отпирающим. Запирающее напряжение на входе путевого приемника 1ЭП падает на участке от генератора Г к рельсу. На выходе каждого из ЭП включено соответствующее путевое реле 1П-12П, которое находится под током при свободности контролируемого участка. С помощью понижающих измерительных трансформаторов 1ИТ-12ИТ происходит преобразование длины свободного участка пути в электрический сигнал. Вторичные обмотки трансформаторов включены последовательно с контактами путевых реле 1П-12П. Они создают в первичной обмотке выходного трансформатора ВТ суммарное напряжение. Шунтирование отцепом второго участка приводит к отпусканию якоря реле 2П. Это происходит в результате более высокого запирающего напряжения свободного первого участка. Фронтовым контактом реле 2П разрывается цепь вторичных обмоток ИТ (начиная с 2ИТ и далее по ходу движения отцепа). На выходе измерительной цепи появляется напряжение, которое пропорционально длине свободного участка. Это напряжение шунтируется и переводится в двоичный код. Таким же способом при движении отцепов работают путевые приемники и реле других участков. Основным преимуществом такого КЗП является легкость построения, но при этом к недостаткам можно отнести: в зависимости от контактного сопротивления (рельсы - колесная пара) изменяется значение напряжения на путевых реле. Так же из-за есть зависимость напряжения на путевом реле от перемещения отцепа. Эти негативные аспекты, при неблагоприятных условиях и сильном загрязнении балласта, способны привести к фиксации ложной занятости участка. При другом способе построения бесстыкового КЗП применяются индуктивные датчики ИД (ДИП-72).В конце зоны контроля рельсы двух соседних путей соединяют перемычкой (шунт) , при этом в начале к крайним рельсам подключают питающий трансформатор ПТ. Датчики ИД устанавливают на противоположных рельсовых нитях этих путей. Расстояние выбирается с учетом длины контрольного участка. При наличии тока в рельсе каждый датчик 1ДИП-nДИП через усилитель У включает соответствующее им контрольное реле П1-Пn. Когда участок свободен обмотка ПТ замкнута с помощью внешних рельсовых нитей, а также с помощью перемычки в конце зоны контроля. В этих условиях сигнальныйток не может протекать по внутренней рельсовой нити, следовательно, в датчиках не наводится ЭДС. При появлении отцепа на контролируемом пути, сигнальный ток от трансформатора ПТ будет проходить по внутренней рельсовой нити через колесные пары. В зоне протекания тока ЭДС наводится во всех датчиках, в соответствии с этим притягивается якорь контрольного реле. Контакты контрольных реле внедряются в измерительную цепь. Она представлена в виде делителя напряжения и является аналогом длины свободной части контрольной зоны.  Рисунок 2.15 – Бесстыковой КЗП с применением датчиков типа ДИП-72 Контроль наличия питания устройств КЗП осуществляется с помощью контрольных датчиков ИД. Они размещаются на внешних рельсовых нитях в начале каждого пути. В момент нарушения питания ЭДС в ИД пропадает, что в свою очередь обесточивает реле К. Включается сигнализация, информирующая о занятости рельсовой линии. Следующим примером использования рельсовой линии для передачи питающего напряжения является построение бесстыкового КЗП с применением ИД типа ДИПЗ-800. Все эти датчики (ИД1-ИД15) устанавливаются на одном из рельсов через каждые 30 м в переделах зоны контроля вдоль сортировочного. В начале этой зоны к рельсовой линии подсоединяется источник питания ИПР переменного тока (f=800 Гц), а шунтирующая перемычка в конце этого участка. ИД преобразуют сигнальный ток в напряжения, которые в свою очередь поступают в преобразователь сигналов ПС на сравнивающие устройства СУ1-СУ15. Эти напряжения усиливаются, выпрямляются, а так же сравниваются между собой. ИПР обеспечивает работу КЗП в режиме максимального сигнального тока в тот момент, когда свободные контрольные участки или колесная пара подвижной единицы находится на самом удаленном участке. На выходе всех ИД имеется равное напряжение и составляет не менее 200 мВ.  Рисунок 2.16 – Бесстыковой КЗП на основе датчиков ДИПЗ-800 В случае когда отцеп располагается в зоне действия двух соседних ИД при этом шунтируя рельсовую линию колесными парами, тогда напряжения на выходах этих ИД будет отличаться не менее чем на 50 мВ. На выходе общего для них СУ возникает сигнал высокого уровня. Он перерабатывается регистрирующим блоком РБ. В регистрирующем блоке формируются двоичный код, который соответствует номеру занятого участка, и аналоговый сигнал, пропорциональный длине не занятого участка. Эти сигналы (цифровой и аналоговый) отправляются на центральный пост для использования в системах горочной автоматики и отображения информации. Одновременно с этим по цепи обратной связи на вход ИПР поступает управляющий сигнал, что приводит к уменьшению тока питания рельсовой линии до номинальной величины в случае, если отцеп находится в начале зоны контроля сортировочного пути. Главным преимуществом КЗП данного типа является снижение энергопотребления, что возможно в результате регулирования источника питания . При этом эффективность регулирования сильно зависит от состояния балласта и контактного сопротивления (рельсы- колесная пара). Дополнительно, подключение напольных устройств требует не маленьких расходов на обустройство кабельной сети. Это приводит к увеличению стоимости всей системы [5]. 2.2.9.4 Контроль заполнения путей методом импульсного зондирования Устройство для контроля заполнения путей методом импульсного зондирования КЗП-ИЗД представляет собой подсистему, входящую в АСУ СП и необходимо для определения расстояния от изолирующего стыка в начале контролируемого пути до ближайшей подвижной единицы. Аппаратура КЗП-ИЗ являлась первым поколением устройств, измеряющих свободную часть пути с применением импульсного зондирования. Главная идея метода заключается в том, чтобы посылать в рельсовую линию импульс напряжения и по форме кривой переходного процесса рассчитывать длину свободной ее части. Отличительной чертой КЗИ-ИЗ от других КЗП заключается в том, что сортировочный путь не разделяется на элементарные участки, а измеряет расстояние до последнего вагона и по этой координате оценивает степень заполнения. Протяженность контролируемого участка пути может достигать 1000 метров. Система состоит из путевых блоков импульсного зондирования БИЗП (по одному на каждый путь) и постового управляющего комплекса УК-КЗП. В УК-КЗП входят: - персональный компьютер ПК с необходимым программным обеспечением; - блок связи БС – по одному на 4 пути. Для определения свободности участка пути на его конце устанавливается дроссель ДТ с индуктивностью (эквивалентной 200-400 метрам рельсовой линии) являющийся нагрузкой.  Рисунок 2.17 – Размещение напольного оборудования в системе КЗП-ИЗ Персональный компьютер формирует команду запроса расстояния и через порт СОМ выдает ее на блок связи БС. С его выхода частотно-модулированный управляющий сигнал по кабельной ЛС поступает на вход БИЗП и получает команду на зондирование. БИЗП генерирует и посылает в рельсовую линию пачку из 4 импульсов напряжения (по 2 импульса каждой полярности). По форме кривых переходного процесса (тока и напряжения) микроконтроллер БИЗП рассчитывает длину свободного участка пути и результат предается по ЛС в УК-КЗП. После преобразования и обработки сигнал передается в управляющий вычислительный комплекс более высокого уровня. УК-КЗП архивирует данные и формирует изображение на мониторе о состоянии пути подгорочного парка. В состав блока БИЗП входят: - два сетевых фильтра; - два питающих трансформатора; - плата ПИЗП. Сетевые фильтры обеспечивают фильтрацию помех, поступающих от питающей сети. Трансформаторы понижают напряжение питающей сети для подачи на плату ПИЗП. Один трансформатор обеспечивает питание силовой части платы, другой – управляющей части. Плата ПИЗП обеспечивает определение расстояния и обмен информацией. В состав платы входят: - выпрямители и стабилизаторы ±12В и +5В питания управляющей части; - силовой выпрямитель; - банка конденсаторов (емкость С); - ключ заряда банки конденсаторов; - ключ разряда банки конденсаторов; - резисторы ограничения тока заряда и разряда банки конденсаторов (R); - усилитель мощности для питания рельсовой цепи; - коммутатор РЦ; - резистор – датчик тока в РЦ (Ri); - микроконтроллер (МК); - аналого-цифровой преобразователь тока (АЦП I) и аналого-цифровой преобразователь напряжения (АЦП U); - схемы контроля тока, мощности и температуры; - усилитель напряжения РЦ и усилитель тока в РЦ; - формирователь сигнала 50Гц; - модем; - схема сброса МК; - адресные перемычки Р9-Р13, Р10-Р14, Р11-Р15, Р12-Р16. Плата работает под управлением программы, записанной в память микроконтроллера. Микроконтроллер сбрасывается при появлении питания на плате схемы сброса. Кроме того сигнал сброса вырабатывается при отсутствии несущей в линии связи на входе модема. Таким образом при отсутствии несущей плата находится в состоянии ожидания (покоя). При наличии несущей МК поддерживает на банке конденсаторов начальное значение напряжения. Микроконтроллер контролирует напряжение на банке с помощью встроенного АЦП ( вход Р101 порта Р10 ) и, в случае если оно меньше заданного, тогда включает ключ заряда, если больше – ключ разряда. Резисторами R ограничивается ток заряда и разряда. При поступлении с линии связи команды запроса расстояния МК анализирует адрес, содержащийся в команде. Если этот адрес совпадает с установленным на адресных перемычках, то он выдает в линию связи расстояние, рассчитанное по предыдущей команде. Если нет, то продолжает поддерживать на банке начальное значение напряжения. В начальный момент времени после снятия сигнала сброса расстояние равно нулю. Затем МК, управляя усилителем мощности и коммутатором РЦ, выдает в рельсовую цепь пачку зондирующих импульсов разной полярности. Фаза импульсов привязана к фазе питающей сети. Привязка осуществляется сигналом “50 Гц”, поступающим с формирователя на вход Р84 порта Р8 МК. Напряжение с входа рельсовой цепи через усилитель U РЦ поступает на АЦП U. При наличии импульсов в РЦ появляется ток. На датчике тока Ri возникает падение напряжения пропорциональное силе тока в РЦ. Это напряжение через усилитель I РЦ поступает на вход АЦП I и вход схемы контроля тока. Периодически запуская АЦП I и АЦП U на преобразование сигналом “STA” с выхода Р106 порта Р10, МК считывает с их выходов в порты Р0-Р3 коды, соответствующие току и напряжению в РЦ. Амплитуда импульсов в РЦ определяется напряжением на выходе усилителя мощности. На вход усилителя мощности поступает напряжение с выхода ЦАП МК (выход Р93 порта Р9). Если ток достигает максимального значения, то схема контроля тока закрывает коммутатор РЦ и импульс прекращается. МК таким образом устанавливает напряжение на выходе ЦАП, чтобы сила тока после окончания переходного процесса приближалась к максимальному значению но не достигала его. Одновременно МК поддерживает на банке конденсаторов напряжение достаточное для нормальной работы усилителя мощности. Схема контроля мощности отслеживает разницу напряжений между выходом усилителя мощности и напряжением его питания. Если эта разница превысит максимально допустимое значение, то схема контроля мощности выключает ключ заряда независимо от микроконтроллера. Схема контроля температуры контролирует температуру силовых элементов платы. Если температура превысит максимально допустимое значение, то схема контроля температуры выключает ключ заряда независимо от МК. Для получения оптимального значения тока микроконтроллер в начале пачки выдает в РЦ пробные импульсы, а затем, после расчета оптимального напряжения на выходе ЦАП – рабочие. Получив множество значений напряжения и тока в РЦ на нескольких импульсах, МК рассчитывает усредненные индуктивность, сопротивление РЦ и сопротивление балласта. Если сопротивления находятся в пределах норм, то рассчитывается расстояние по индуктивности и удельной индуктивности. Полученное значение расстояния сохраняется. Если сопротивления выходят за пределы норм, то микроконтроллер формирует код ошибки. Код ошибки создается также при обнаружении неисправности аппаратуры. При получении следующей команды запроса с адресом, соответствующим установленному перемычками, микроконтроллер выдает в линию связи код расстояния или код ошибки. При выдаче кода расстояния старшие 6 разрядов второго байта равны 0. При выдаче кода ошибки младший байт равен 0, а в старшем находится код ошибки [6].  К преимуществам КЗП-ИЗ можно отнести: - минимальный расход кабеля; - небольшой вес и габариты аппаратуры; - малое энергопотребление. КЗП-ИЗ присущи их общие недостатки: - зависимость точности измерения от сопротивления рельсовой линии, стыковых соединителей, балласта, клеммных соединений; - неработоспособность при сильном загрязнении колес и поверхностей катания рельсов, а также чувствительность к состоянию изолирующих стыков; - статический контроль местоположения только последнего вагона на пути; - необходимость сезонных регулировок и большие эксплуатационные расходы на техническое содержание напольных устройств КЗП [5]. 2.2.9.5 Контроль заполнения путей с использованием индуктивно-проводных датчиков Для контроля заполнения путей таким способом в системе КЗП ИД используются индуктивно-проводные датчики ИПД (генераторные датчики). В основе работы ИПД заложен эффект близости. Он характеризуется тем, что под действием массы тела изменяются параметры внешней среды, которые контролируются чувствительным датчиком. При появлении вагона в зоне контроля происходит изменение магнитных свойств среды, что приводит к изменению реактивных составляющих полного сопротивления катушки датчика. В качестве приемной катушки используется индуктивный шлейф ИШ, выполненный с помощью кабеля. Он укладывается на подошвы рельсов внутри колеи в виде прямоугольной рамки. Жилы кабеля соединяются последовательно друг с другом, образуя требуемое число витков индуктивного контура. Полученный контур является чувствительным элементом датчика. Наличие вагона над ИШ приводит к срыву генерации и пропадания сигнала на выходе датчика. Индуктивно-проводной датчик состоит из: - путевого индуктивного шлейфа ИШ; - электронного модуля ЭМ, устанавливаемого в электронный блок БЭ; - линий связи. Два ИПД располагаются в путевом блоке ПБ непосредственно у рельсового пути (Рисунок 2.19). 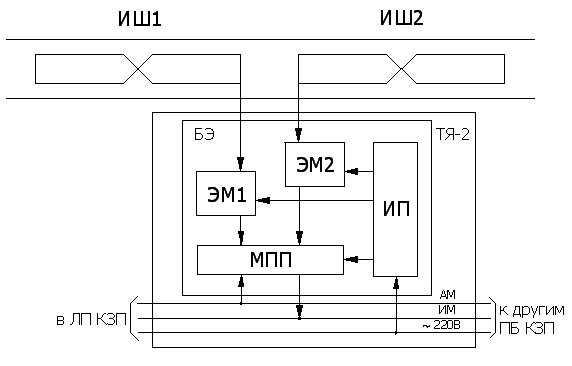 Рисунок 2.19 – Структурная схема ИПД Электронный блок состоит из: - задающего генератора (содержащего LC-контур); - согласующего каскада; - компаратора напряжения (является одновременно формирователем прямоугольных импульсов); - выходных каскадов; - разделительного трансформатора - источника питания. Путевые устройства ИПД так же содержат межрельсовые переходы для укладки кабеля петли и промежуточные концевые захваты для фиксации кабеля относительно рельса. Контролируемый путь делится на участки с ИШ длиной 22 м, расстояния между участками 3 м. Два соседних участка контролируются одним ПД. Каждому путевой датчик имеет свой адрес. Нечетного пути присваиваются адреса с 1-го по 9-ый, а четного пути с 10-го по 18-ый. Отсчет ведется от парковой тормозной позиции. Входы путевых датчиков четного и нечетного путей подключены к одной адресной магистрали АМ. Выходы датчиков (контролирующих нечетные участки этих путей) подключены к нечетным информационным магистралям. Выходы датчиков (контролирующих четные участки двух путей) подключены к четным информационным магистралям. Работа КЗП осуществляется следующим образом. На входы датчиков по АМ из формирователя информации ФИ линейного пункта КЗП поступает запрос в виде кодовой посылки, содержащей адрес датчика. Если адрес датчика совпадает с кодом запроса, то его выходы подключаются к соответствующим информационным магистралям (ИМ1 - ИМ24). Выходные сигналы одноименных датчиков, содержащие информацию о состоянии контрольных участков путей, по информационным магистралям передаются в ФИ линейного пункта КЗП. В линейном пункте КЗП формируется кодовая посылка, содержащая код адреса опрашиваемой группы одноименных датчиков и информацию о состоянии контролируемых ими участков. Кодовая посылка по информационной магистрали ИМ в биполярном последовательном коде передается в центральный пост КЗП. В это время в ФИ формируется новый запрос с адресом датчика на единицу больше предыдущего и опрашивается следующая группа ПД. Информация от этих датчиков передается по информационным магистралям в ФИ линейного пункта КЗП, а оттуда на входы контроллера КЗП. После опроса датчиков с адресом «18» ФИ начинает новый цикл опроса с адреса «1». Время опроса всех датчиков КЗП составляет 1,3 с. На мониторе контроллера КЗП отражается информация о состоянии контролируемых участков сортировочных путей и осуществляется передача этой информации во внешние вычислительные устройства центрального поста КЗП. Достоинства КЗП - ИПД: - простота конструкции и низкая стоимость оборудования; - независимость от погодных условий; - отсутствие ограничений на размещение оборудования по условиям габарита; - обеспечение требований CЦБ по условиям безопасности движения; - непрерывность процесса контроля присутствия вагонов на контролируемом участке [7]. 2.2.9.6 Радиолокационный метод контроля заполнения путей Система радиолокационного контроля заполнения путей в сортировочном парке РЛС КЗП является относительно новой разработкой. В структуре применяются радиолокационных станций малого радиуса действия. Используются высокоинформативные сверхширокополосные радиолокаторы, которые позволяют вести периодический контроль за ограниченными участками наблюдаемой территории. Радиолокатор системы ведет наблюдение в зоне ограниченной шириной его диаграммы направленности. Зоны радиолокаторов пересекаются и образуют единую зону наблюдения, которая охватывает весь парк заполнения протяженностью до 1000 метров. Комплекты таких радиолокационных измерителей РИ выдают информацию в систему обработки и управления СОУ и образуют систему РЛС-КПЗ (рисунок 2.20). 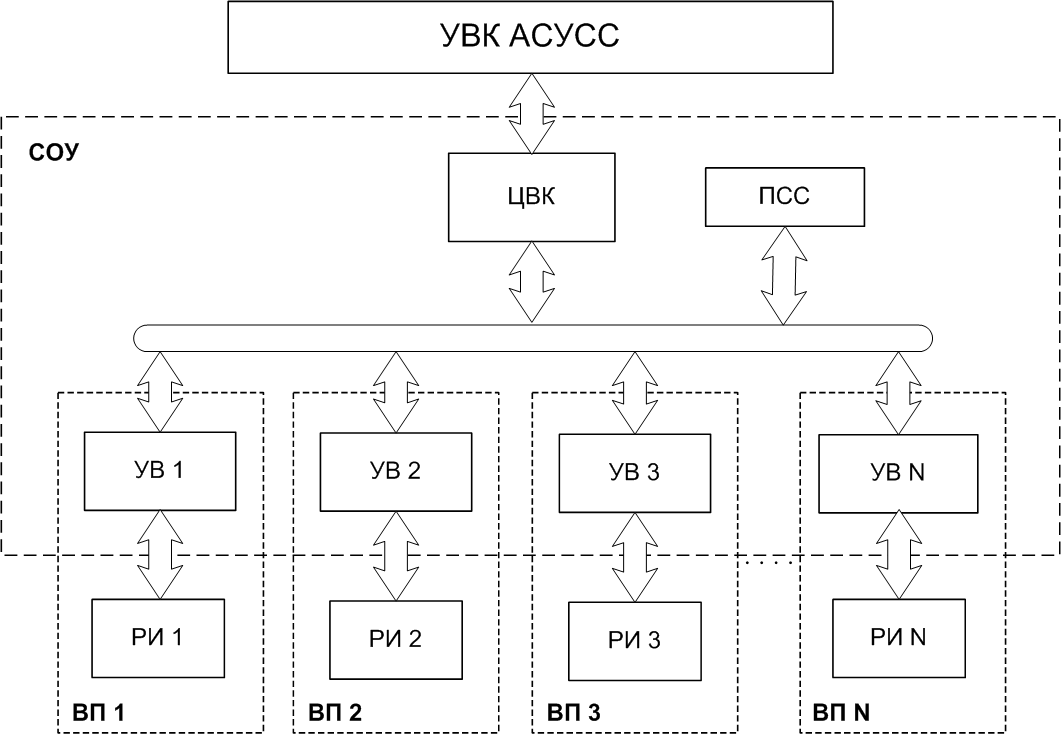 Рисунок 2.20 – Структурная схема РЛС КЗП СОУ осуществляет основные вычислительные операции обработки информации и управления. Формирует: - траекторию движения отцепов по пути сортировочного парка; - информацию о положении точки прицеливания; - информацию о месте остановки отцепа; - информацию о длине свободного пробега до стоящего отцепа; - информацию о суммарной длине промежутков между стоящими не сцепленными единицами подвижного состава. СОУ производит взаимодействие с существующими системами и УВК АСУСС, а также формирует команды управления РИ и обрабатывает полученные результаты. Система СОУ является многопроцессорной и территориально распределенной. Она включает в себя: - центральный вычислительный комплекс ЦВК (в «пункте управления горкой»); - удаленные вычислители УВ; - подсистему связи и синхронизации ПСС. Радиолокационные измерители являются основными элементами системы и организуют непосредственное наблюдение за контролируемой территорией. РИ по сигналам управления от СОУ обеспечивает обзор контролируемого пространства на задаваемой дальности и выдачу сигналов из строба с этой дальности в СОУ в цифровом виде для последующей обработки. Количество радиолокационных измерителей задает размер зоны контроля, производительность (количество одновременно сопровождаемых отцепов) и точность системы. Система функционирует независимо от: - состояния путей сортировочного парка; - состояния подвижного состава; - погодных условий (дождя, тумана, снега). К недостаткам можно отнести зависимость точности определения положения отцепов на малых скоростях (до 1,5км/ч), что определяется физическими возможностями используемых радиолокаторов. |